 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopology-Driven Trajectory Optimization for Modelling Controllable Interactions Within Multi-Vehicle Scenario
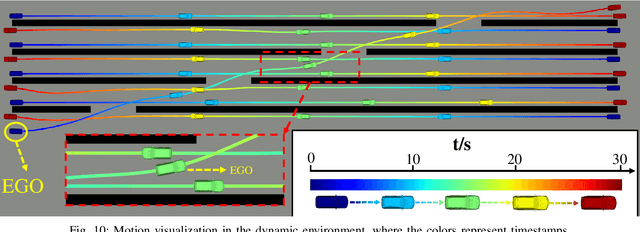
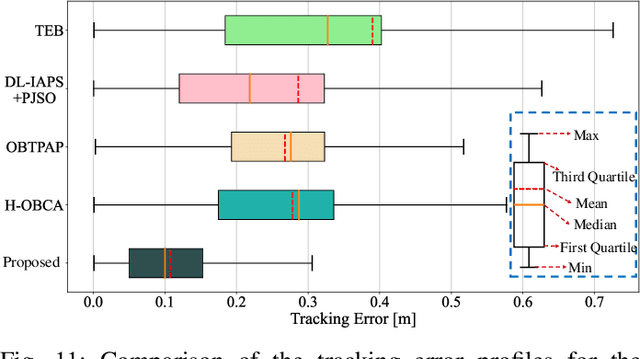
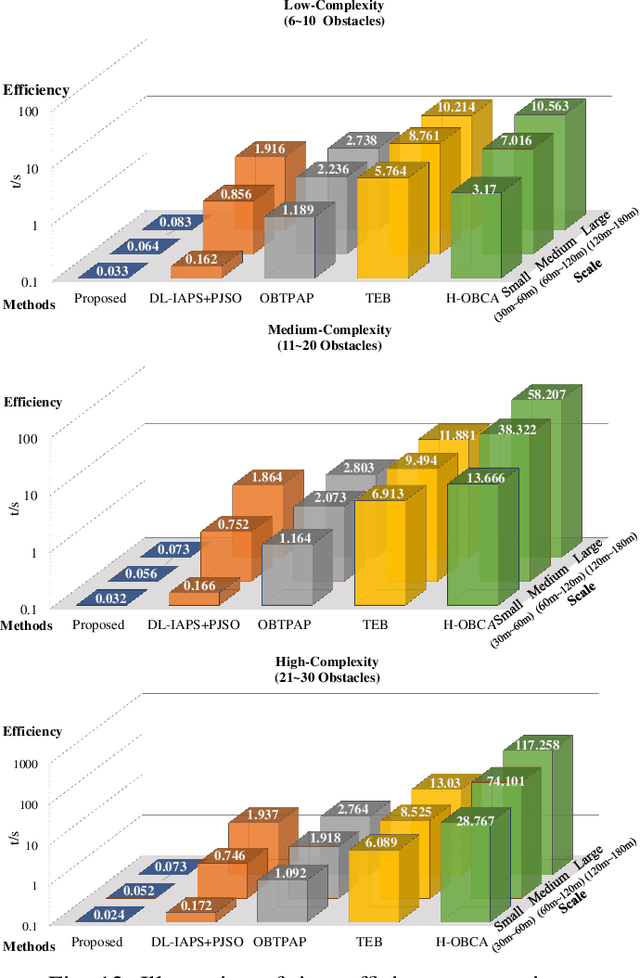
Mar 07, 2025Trajectory optimization in multi-vehicle scenarios faces challenges due to its non-linear, non-convex properties and sensitivity to initial values, making interactions between vehicles difficult to control. In this paper, inspired by topological planning, we propose a differentiable local homotopy invariant metric to model the interactions. By incorporating this topological metric as a constraint into multi-vehicle trajectory optimization, our framework is capable of generating multiple interactive trajectories from the same initial values, achieving controllable interactions as well as supporting user-designed interaction patterns. Extensive experiments demonstrate its superior optimality and efficiency over existing methods. We will release open-source code to advance relative research.
Decentralized Planning for Car-Like Robotic Swarm in Unstructured Environments
Oct 12, 2022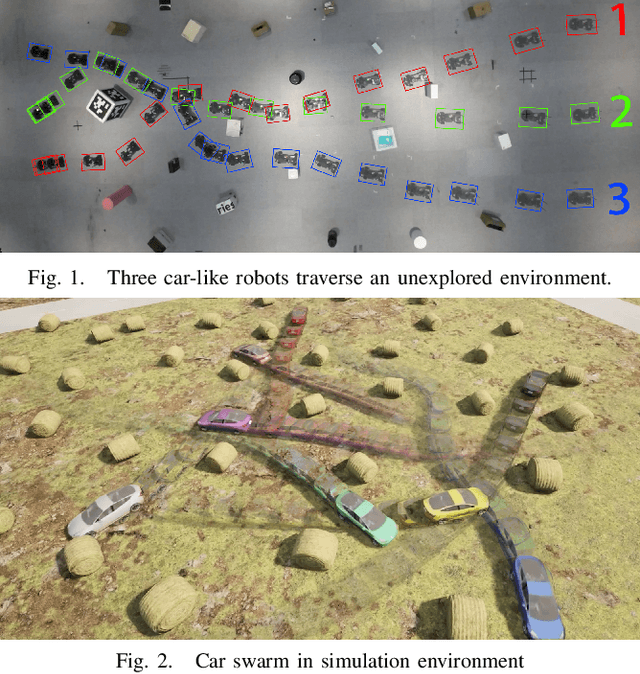
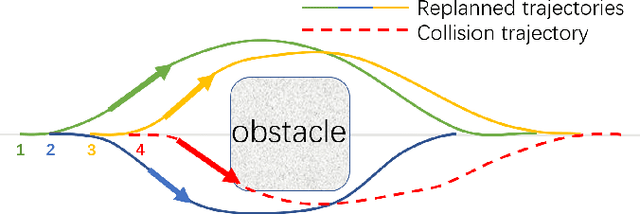
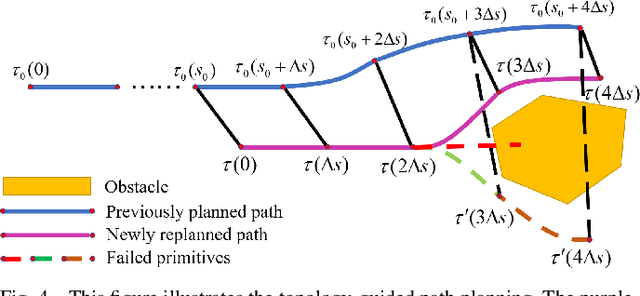
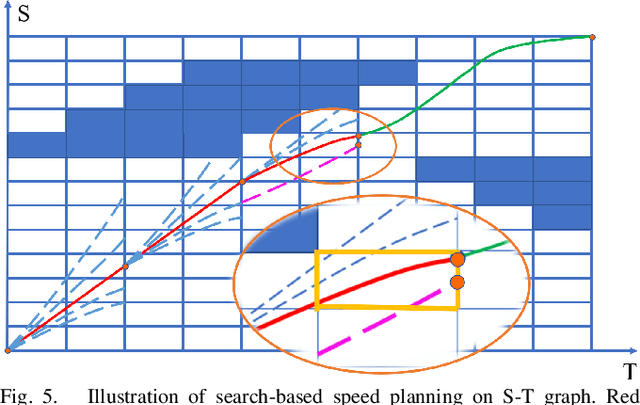
Robot swarm is a hot spot in robotic research community. In this paper, we propose a decentralized framework for car-like robotic swarm which is capable of real-time planning in unstructured environments. In this system, path finding is guided by environmental topology information to avoid frequent topological change, and search-based speed planning is leveraged to escape from infeasible initial value's local minima. Then spatial-temporal optimization is employed to generate a safe, smooth and dynamically feasible trajectory. During optimization, penalty is imposed on signed distance between agents to realize collision avoidance, and differential flatness cooperated with limitation on front steer angle satisfies the non-holonomic constraints. With trajectories broadcast to the wireless network, agents are able to check and prevent from potential collisions. We validate the robustness of our system in simulation and real-world experiments. Code will be released as open-source packages.
Differential Flatness-Based Trajectory Planning for Autonomous Vehicles
Aug 28, 2022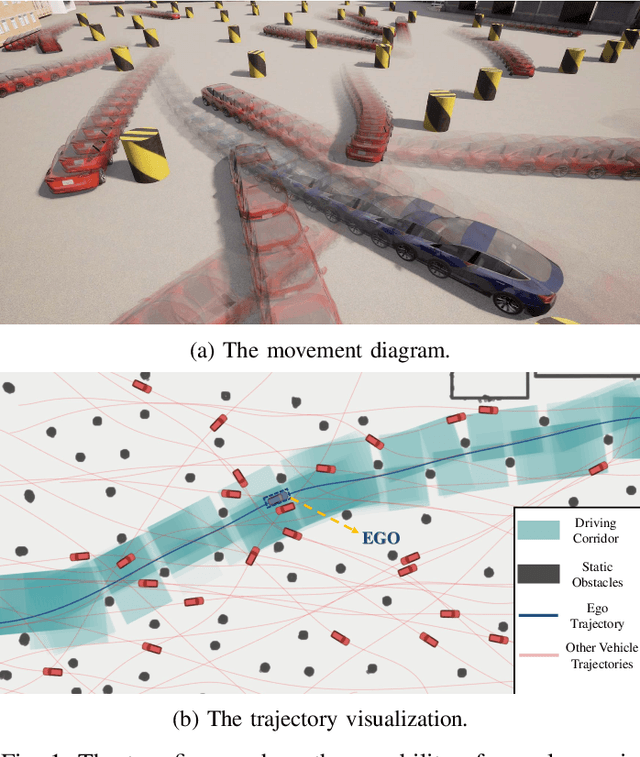
As a core part of autonomous driving systems, motion planning has received extensive attention from academia and industry. However, there is no efficient trajectory planning solution capable of spatial-temporal joint optimization due to nonholonomic dynamics, particularly in the presence of unstructured environments and dynamic obstacles. To bridge the gap, we propose a versatile and real-time trajectory optimization method that can generate a high-quality feasible trajectory using a full vehicle model under arbitrary constraints. By leveraging the differential flatness property of car-like robots, we use flat outputs to analytically formulate all feasibility constraints to simplify the trajectory planning problem. Moreover, obstacle avoidance is achieved with full dimensional polygons to generate less conservative trajectories with safety guarantees, especially in tightly constrained spaces. We present comprehensive benchmarks with cutting-edge methods, demonstrating the significance of the proposed method in terms of efficiency and trajectory quality. Real-world experiments verify the practicality of our algorithm. We will release our codes as open-source packages with the purpose for the reference of the research community.