 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Generation of Aerobatic Flight in Complex Environments via Diffusion Models
Apr 21, 2025Performing striking aerobatic flight in complex environments demands manual designs of key maneuvers in advance, which is intricate and time-consuming as the horizon of the trajectory performed becomes long. This paper presents a novel framework that leverages diffusion models to automate and scale up aerobatic trajectory generation. Our key innovation is the decomposition of complex maneuvers into aerobatic primitives, which are short frame sequences that act as building blocks, featuring critical aerobatic behaviors for tractable trajectory synthesis. The model learns aerobatic primitives using historical trajectory observations as dynamic priors to ensure motion continuity, with additional conditional inputs (target waypoints and optional action constraints) integrated to enable user-editable trajectory generation. During model inference, classifier guidance is incorporated with batch sampling to achieve obstacle avoidance. Additionally, the generated outcomes are refined through post-processing with spatial-temporal trajectory optimization to ensure dynamical feasibility. Extensive simulations and real-world experiments have validated the key component designs of our method, demonstrating its feasibility for deploying on real drones to achieve long-horizon aerobatic flight.
Implicit Swept Volume SDF: Enabling Continuous Collision-Free Trajectory Generation for Arbitrary Shapes
May 01, 2024


In the field of trajectory generation for objects, ensuring continuous collision-free motion remains a huge challenge, especially for non-convex geometries and complex environments. Previous methods either oversimplify object shapes, which results in a sacrifice of feasible space or rely on discrete sampling, which suffers from the "tunnel effect". To address these limitations, we propose a novel hierarchical trajectory generation pipeline, which utilizes the Swept Volume Signed Distance Field (SVSDF) to guide trajectory optimization for Continuous Collision Avoidance (CCA). Our interdisciplinary approach, blending techniques from graphics and robotics, exhibits outstanding effectiveness in solving this problem. We formulate the computation of the SVSDF as a Generalized Semi-Infinite Programming model, and we solve for the numerical solutions at query points implicitly, thereby eliminating the need for explicit reconstruction of the surface. Our algorithm has been validated in a variety of complex scenarios and applies to robots of various dynamics, including both rigid and deformable shapes. It demonstrates exceptional universality and superior CCA performance compared to typical algorithms. The code will be released at https://github.com/ZJU-FAST-Lab/Implicit-SVSDF-Planner for the benefit of the community.
Continuous Implicit SDF Based Any-shape Robot Trajectory Optimization
Mar 02, 2023



Optimization-based trajectory generation methods are widely used in whole-body planning for robots. However, existing work either oversimplifies the robot's geometry and environment representation, resulting in a conservative trajectory, or suffers from a huge overhead in maintaining additional information such as the Signed Distance Field (SDF). To bridge the gap, we consider the robot as an implicit function, with its surface boundary represented by the zero-level set of its SDF. Based on this, we further employ another implicit function to lazily compute the signed distance to the swept volume generated by the robot and its trajectory. The computation is efficient by exploiting continuity in space-time, and the implicit function guarantees precise and continuous collision evaluation even for nonconvex robots with complex surfaces. Furthermore, we propose a trajectory optimization pipeline applicable to the implicit SDF. Simulation and real-world experiments validate the high performance of our approach for arbitrarily shaped robot trajectory optimization.
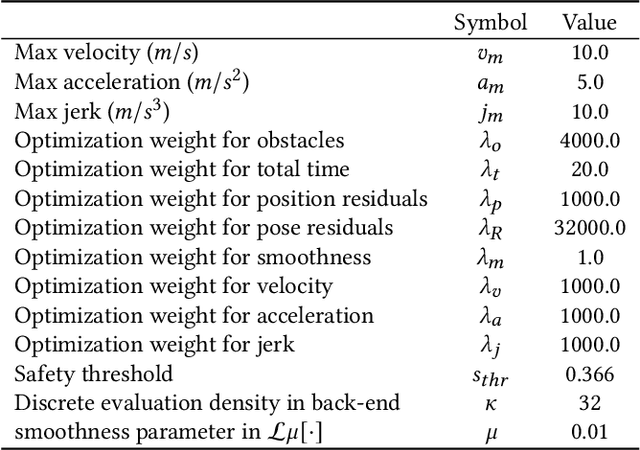
Decentralized Planning for Car-Like Robotic Swarm in Unstructured Environments
Oct 12, 2022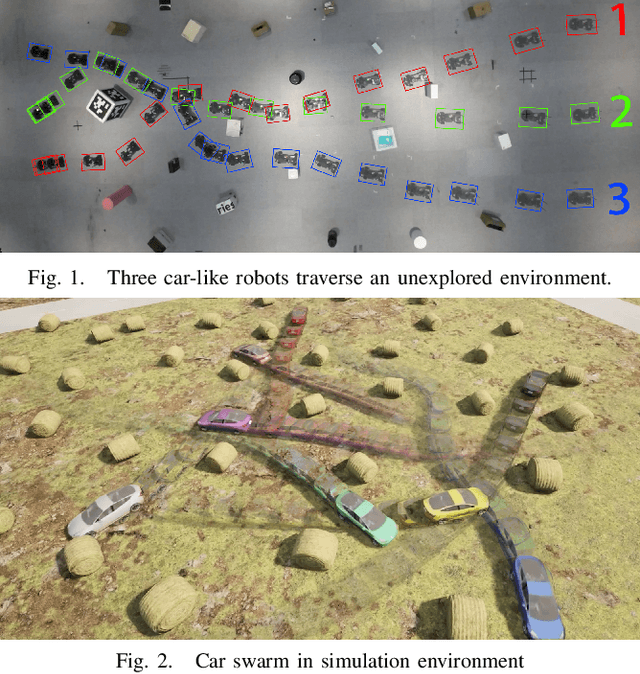
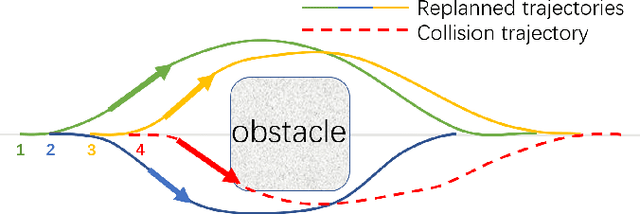
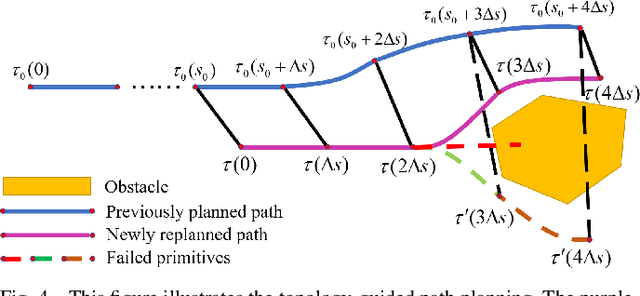
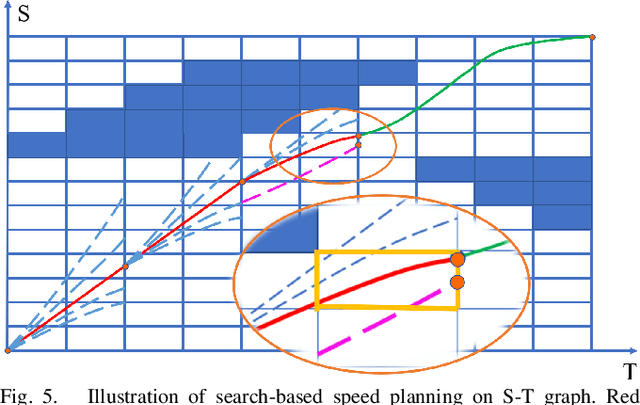
Robot swarm is a hot spot in robotic research community. In this paper, we propose a decentralized framework for car-like robotic swarm which is capable of real-time planning in unstructured environments. In this system, path finding is guided by environmental topology information to avoid frequent topological change, and search-based speed planning is leveraged to escape from infeasible initial value's local minima. Then spatial-temporal optimization is employed to generate a safe, smooth and dynamically feasible trajectory. During optimization, penalty is imposed on signed distance between agents to realize collision avoidance, and differential flatness cooperated with limitation on front steer angle satisfies the non-holonomic constraints. With trajectories broadcast to the wireless network, agents are able to check and prevent from potential collisions. We validate the robustness of our system in simulation and real-world experiments. Code will be released as open-source packages.
Formation Flight in Dense Environments
Oct 08, 2022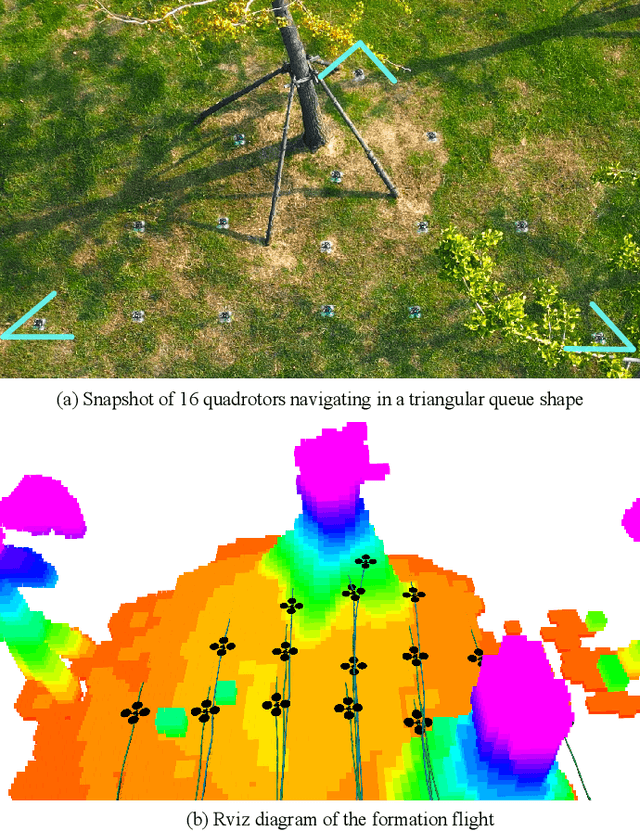
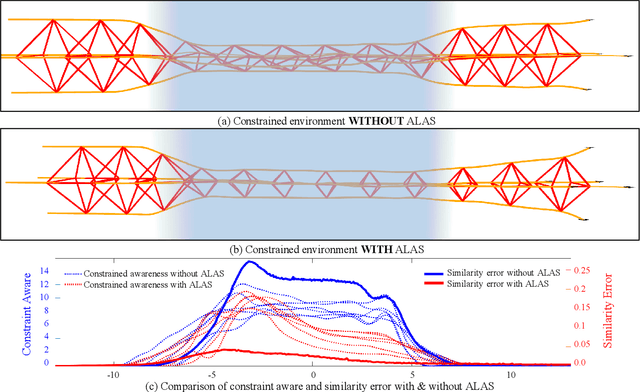
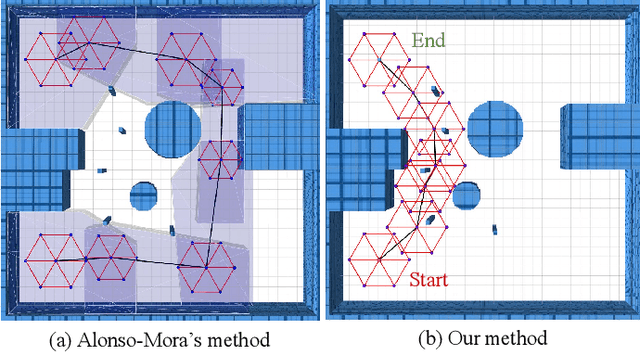
Formation flight has a vast potential for aerial robot swarms in various applications. However, existing methods lack the capability to achieve fully autonomous large-scale formation flight in dense environments. To bridge the gap, we present a complete formation flight system that effectively integrates real-world constraints into aerial formation navigation. This paper proposes a differentiable graph-based metric to quantify the overall similarity error between formations. This metric is invariant to rotation, translation, and scaling, providing more freedom for formation coordination. We design a distributed trajectory optimization framework that considers formation similarity, obstacle avoidance, and dynamic feasibility. The optimization is decoupled to make large-scale formation flights computationally feasible. To improve the elasticity of formation navigation in highly constrained scenes, we present a swarm reorganization method which adaptively adjusts the formation parameters and task assignments by generating local navigation goals. A novel swarm agreement strategy called global-remap-local-replan and a formation-level path planner is proposed in this work to coordinate the swarm global planning and local trajectory optimizations efficiently. To validate the proposed method, we design comprehensive benchmarks and simulations with other cutting-edge works in terms of adaptability, predictability, elasticity, resilience, and efficiency. Finally, integrated with palm-sized swarm platforms with onboard computers and sensors, the proposed method demonstrates its efficiency and robustness by achieving the largest scale formation flight in dense outdoor environments.