 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLEMON-Mapping: Loop-Enhanced Large-Scale Multi-Session Point Cloud Merging and Optimization for Globally Consistent Mapping
May 15, 2025With the rapid development of robotics, multi-robot collaboration has become critical and challenging. One key problem is integrating data from multiple robots to build a globally consistent and accurate map for robust cooperation and precise localization. While traditional multi-robot pose graph optimization (PGO) maintains basic global consistency, it focuses primarily on pose optimization and ignores the geometric structure of the map. Moreover, PGO only uses loop closure as a constraint between two nodes, failing to fully exploit its capability to maintaining local consistency of multi-robot maps. Therefore, PGO-based multi-robot mapping methods often suffer from serious map divergence and blur, especially in regions with overlapping submaps. To address this issue, we propose Lemon-Mapping, a loop-enhanced framework for large-scale multi-session point cloud map fusion and optimization, which reasonably utilizes loop closure and improves the geometric quality of the map. We re-examine the role of loops for multi-robot mapping and introduce three key innovations. First, we develop a robust loop processing mechanism that effectively rejects outliers and a novel loop recall strategy to recover mistakenly removed loops. Second, we introduce a spatial bundle adjustment method for multi-robot maps that significantly reduces the divergence in overlapping regions and eliminates map blur. Third, we design a PGO strategy that leverages the refined constraints of bundle adjustment to extend the local accuracy to the global map. We validate our framework on several public datasets and a self-collected dataset. Experimental results demonstrate that our method outperforms traditional map merging approaches in terms of mapping accuracy and reduction of map divergence. Scalability experiments also demonstrate the strong capability of our framework to handle scenarios involving numerous robots.
Automatic Generation of Aerobatic Flight in Complex Environments via Diffusion Models
Apr 21, 2025Performing striking aerobatic flight in complex environments demands manual designs of key maneuvers in advance, which is intricate and time-consuming as the horizon of the trajectory performed becomes long. This paper presents a novel framework that leverages diffusion models to automate and scale up aerobatic trajectory generation. Our key innovation is the decomposition of complex maneuvers into aerobatic primitives, which are short frame sequences that act as building blocks, featuring critical aerobatic behaviors for tractable trajectory synthesis. The model learns aerobatic primitives using historical trajectory observations as dynamic priors to ensure motion continuity, with additional conditional inputs (target waypoints and optional action constraints) integrated to enable user-editable trajectory generation. During model inference, classifier guidance is incorporated with batch sampling to achieve obstacle avoidance. Additionally, the generated outcomes are refined through post-processing with spatial-temporal trajectory optimization to ensure dynamical feasibility. Extensive simulations and real-world experiments have validated the key component designs of our method, demonstrating its feasibility for deploying on real drones to achieve long-horizon aerobatic flight.
FACT: Fast and Active Coordinate Initialization for Vision-based Drone Swarms
Mar 20, 2024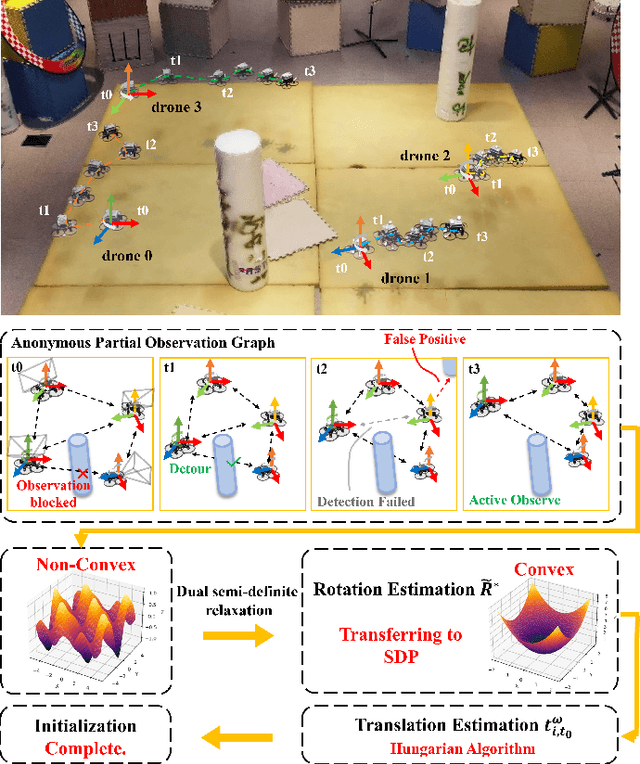
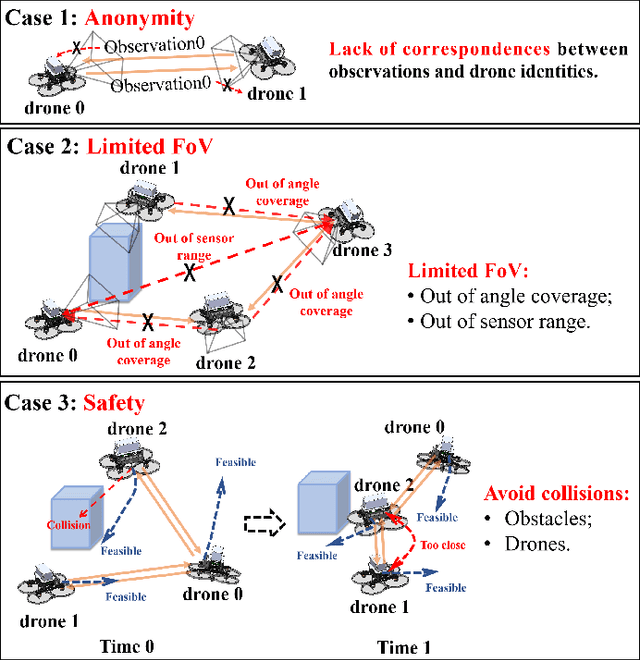
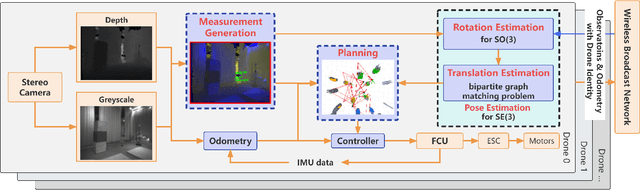
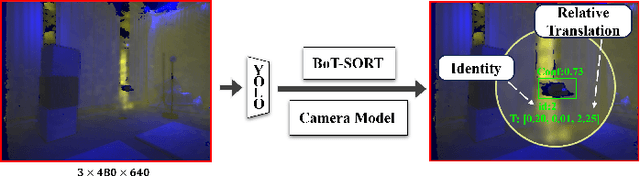
Swarm robots have sparked remarkable developments across a range of fields. While it is necessary for various applications in swarm robots, a fast and robust coordinate initialization in vision-based drone swarms remains elusive. To this end, our paper proposes a complete system to recover a swarm's initial relative pose on platforms with size, weight, and power (SWaP) constraints. To overcome limited coverage of field-of-view (FoV), the drones rotate in place to obtain observations. To tackle the anonymous measurements, we formulate a non-convex rotation estimation problem and transform it into a semi-definite programming (SDP) problem, which can steadily obtain global optimal values. Then we utilize the Hungarian algorithm to recover relative translation and correspondences between observations and drone identities. To safely acquire complete observations, we actively search for positions and generate feasible trajectories to avoid collisions. To validate the practicability of our system, we conduct experiments on a vision-based drone swarm with only stereo cameras and inertial measurement units (IMUs) as sensors. The results demonstrate that the system can robustly get accurate relative poses in real time with limited onboard computation resources. The source code is released.