 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGround-Effect-Aware Modeling and Control for Multicopters
Jun 24, 2025The ground effect on multicopters introduces several challenges, such as control errors caused by additional lift, oscillations that may occur during near-ground flight due to external torques, and the influence of ground airflow on models such as the rotor drag and the mixing matrix. This article collects and analyzes the dynamics data of near-ground multicopter flight through various methods, including force measurement platforms and real-world flights. For the first time, we summarize the mathematical model of the external torque of multicopters under ground effect. The influence of ground airflow on rotor drag and the mixing matrix is also verified through adequate experimentation and analysis. Through simplification and derivation, the differential flatness of the multicopter's dynamic model under ground effect is confirmed. To mitigate the influence of these disturbance models on control, we propose a control method that combines dynamic inverse and disturbance models, ensuring consistent control effectiveness at both high and low altitudes. In this method, the additional thrust and variations in rotor drag under ground effect are both considered and compensated through feedforward models. The leveling torque of ground effect can be equivalently represented as variations in the center of gravity and the moment of inertia. In this way, the leveling torque does not explicitly appear in the dynamic model. The final experimental results show that the method proposed in this paper reduces the control error (RMSE) by \textbf{45.3\%}. Please check the supplementary material at: https://github.com/ZJU-FAST-Lab/Ground-effect-controller.
LEMON-Mapping: Loop-Enhanced Large-Scale Multi-Session Point Cloud Merging and Optimization for Globally Consistent Mapping
May 15, 2025With the rapid development of robotics, multi-robot collaboration has become critical and challenging. One key problem is integrating data from multiple robots to build a globally consistent and accurate map for robust cooperation and precise localization. While traditional multi-robot pose graph optimization (PGO) maintains basic global consistency, it focuses primarily on pose optimization and ignores the geometric structure of the map. Moreover, PGO only uses loop closure as a constraint between two nodes, failing to fully exploit its capability to maintaining local consistency of multi-robot maps. Therefore, PGO-based multi-robot mapping methods often suffer from serious map divergence and blur, especially in regions with overlapping submaps. To address this issue, we propose Lemon-Mapping, a loop-enhanced framework for large-scale multi-session point cloud map fusion and optimization, which reasonably utilizes loop closure and improves the geometric quality of the map. We re-examine the role of loops for multi-robot mapping and introduce three key innovations. First, we develop a robust loop processing mechanism that effectively rejects outliers and a novel loop recall strategy to recover mistakenly removed loops. Second, we introduce a spatial bundle adjustment method for multi-robot maps that significantly reduces the divergence in overlapping regions and eliminates map blur. Third, we design a PGO strategy that leverages the refined constraints of bundle adjustment to extend the local accuracy to the global map. We validate our framework on several public datasets and a self-collected dataset. Experimental results demonstrate that our method outperforms traditional map merging approaches in terms of mapping accuracy and reduction of map divergence. Scalability experiments also demonstrate the strong capability of our framework to handle scenarios involving numerous robots.
Tracailer: An Efficient Trajectory Planner for Tractor-Trailer Vehicles in Unstructured Environments
Feb 27, 2025The tractor-trailer vehicle (robot) consists of a drivable tractor and one or more non-drivable trailers connected via hitches. Compared to typical car-like robots, the addition of trailers provides greater transportation capability. However, this also complicates motion planning due to the robot's complex kinematics, high-dimensional state space, and deformable structure. To efficiently plan safe, time-optimal trajectories that adhere to the kinematic constraints of the robot and address the challenges posed by its unique features, this paper introduces a lightweight, compact, and high-order smooth trajectory representation for tractor-trailer robots. Based on it, we design an efficiently solvable spatio-temporal trajectory optimization problem. To deal with deformable structures, which leads to difficulties in collision avoidance, we fully leverage the collision-free regions of the environment, directly applying deformations to trajectories in continuous space. This approach not requires constructing safe regions from the environment using convex approximations through collision-free seed points before each optimization, avoiding the loss of the solution space, thus reducing the dependency of the optimization on initial values. Moreover, a multi-terminal fast path search algorithm is proposed to generate the initial values for optimization. Extensive simulation experiments demonstrate that our approach achieves several-fold improvements in efficiency compared to existing algorithms, while also ensuring lower curvature and trajectory duration. Real-world experiments involving the transportation, loading and unloading of goods in both indoor and outdoor scenarios further validate the effectiveness of our method. The source code is accessible at https://github.com/ZJU-FAST-Lab/tracailer/.
LF-3PM: a LiDAR-based Framework for Perception-aware Planning with Perturbation-induced Metric
Aug 03, 2024

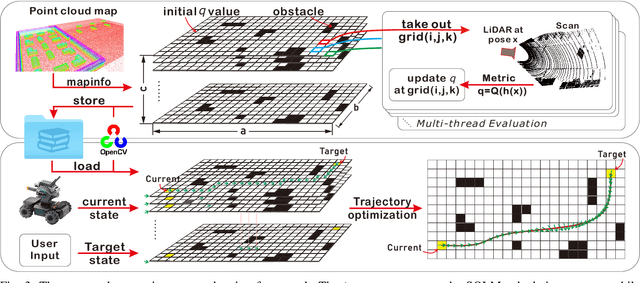

Just as humans can become disoriented in featureless deserts or thick fogs, not all environments are conducive to the Localization Accuracy and Stability (LAS) of autonomous robots. This paper introduces an efficient framework designed to enhance LiDAR-based LAS through strategic trajectory generation, known as Perception-aware Planning. Unlike vision-based frameworks, the LiDAR-based requires different considerations due to unique sensor attributes. Our approach focuses on two main aspects: firstly, assessing the impact of LiDAR observations on LAS. We introduce a perturbation-induced metric to provide a comprehensive and reliable evaluation of LiDAR observations. Secondly, we aim to improve motion planning efficiency. By creating a Static Observation Loss Map (SOLM) as an intermediary, we logically separate the time-intensive evaluation and motion planning phases, significantly boosting the planning process. In the experimental section, we demonstrate the effectiveness of the proposed metrics across various scenes and the feature of trajectories guided by different metrics. Ultimately, our framework is tested in a real-world scenario, enabling the robot to actively choose topologies and orientations preferable for localization. The source code is accessible at https://github.com/ZJU-FAST-Lab/LF-3PM.
An Efficient Trajectory Planner for Car-like Robots on Uneven Terrain
Sep 12, 2023



Autonomous navigation of ground robots on uneven terrain is being considered in more and more tasks. However, uneven terrain will bring two problems to motion planning: how to assess the traversability of the terrain and how to cope with the dynamics model of the robot associated with the terrain. The trajectories generated by existing methods are often too conservative or cannot be tracked well by the controller since the second problem is not well solved. In this paper, we propose terrain pose mapping to describe the impact of terrain on the robot. With this mapping, we can obtain the SE(3) state of the robot on uneven terrain for a given state in SE(2). Then, based on it, we present a trajectory optimization framework for car-like robots on uneven terrain that can consider both of the above problems. The trajectories generated by our method conform to the dynamics model of the system without being overly conservative and yet able to be tracked well by the controller. We perform simulations and real-world experiments to validate the efficiency and trajectory quality of our algorithm.