 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLF-3PM: a LiDAR-based Framework for Perception-aware Planning with Perturbation-induced Metric
Paper and Code


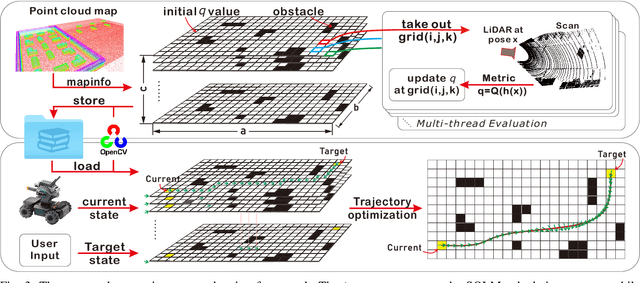

Just as humans can become disoriented in featureless deserts or thick fogs, not all environments are conducive to the Localization Accuracy and Stability (LAS) of autonomous robots. This paper introduces an efficient framework designed to enhance LiDAR-based LAS through strategic trajectory generation, known as Perception-aware Planning. Unlike vision-based frameworks, the LiDAR-based requires different considerations due to unique sensor attributes. Our approach focuses on two main aspects: firstly, assessing the impact of LiDAR observations on LAS. We introduce a perturbation-induced metric to provide a comprehensive and reliable evaluation of LiDAR observations. Secondly, we aim to improve motion planning efficiency. By creating a Static Observation Loss Map (SOLM) as an intermediary, we logically separate the time-intensive evaluation and motion planning phases, significantly boosting the planning process. In the experimental section, we demonstrate the effectiveness of the proposed metrics across various scenes and the feature of trajectories guided by different metrics. Ultimately, our framework is tested in a real-world scenario, enabling the robot to actively choose topologies and orientations preferable for localization. The source code is accessible at https://github.com/ZJU-FAST-Lab/LF-3PM.