 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGPU-accelerated Multi-relational Parallel Graph Retrieval for Web-scale Recommendations
Feb 17, 2025



Web recommendations provide personalized items from massive catalogs for users, which rely heavily on retrieval stages to trade off the effectiveness and efficiency of selecting a small relevant set from billion-scale candidates in online digital platforms. As one of the largest Chinese search engine and news feed providers, Baidu resorts to Deep Neural Network (DNN) and graph-based Approximate Nearest Neighbor Search (ANNS) algorithms for accurate relevance estimation and efficient search for relevant items. However, current retrieval at Baidu fails in comprehensive user-item relational understanding due to dissected interaction modeling, and performs inefficiently in large-scale graph-based ANNS because of suboptimal traversal navigation and the GPU computational bottleneck under high concurrency. To this end, we propose a GPU-accelerated Multi-relational Parallel Graph Retrieval (GMP-GR) framework to achieve effective yet efficient retrieval in web-scale recommendations. First, we propose a multi-relational user-item relevance metric learning method that unifies diverse user behaviors through multi-objective optimization and employs a self-covariant loss to enhance pathfinding performance. Second, we develop a hierarchical parallel graph-based ANNS to boost graph retrieval throughput, which conducts breadth-depth-balanced searches on a large-scale item graph and cost-effectively handles irregular neural computation via adaptive aggregation on GPUs. In addition, we integrate system optimization strategies in the deployment of GMP-GR in Baidu. Extensive experiments demonstrate the superiority of GMP-GR in retrieval accuracy and efficiency. Deployed across more than twenty applications at Baidu, GMP-GR serves hundreds of millions of users with a throughput exceeding one hundred million requests per second.
Hibikino-Musashi@Home 2024 Team Description Paper
Oct 08, 2024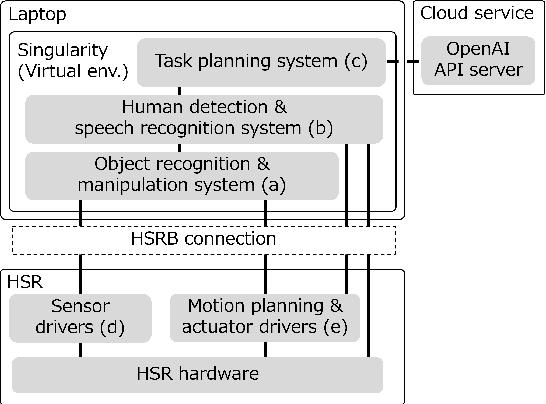
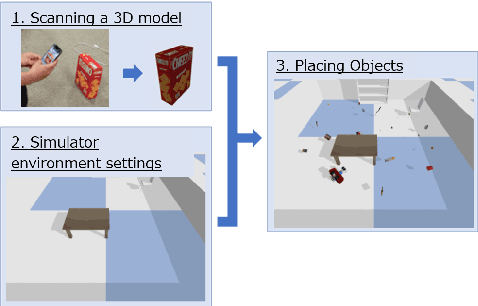
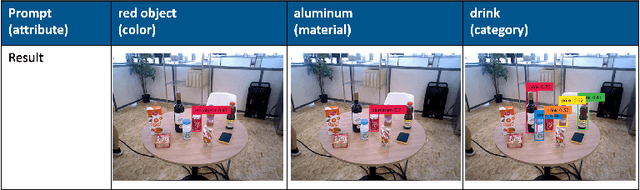
This paper provides an overview of the techniques employed by Hibikino-Musashi@Home, which intends to participate in the domestic standard platform league. The team has developed a dataset generator for training a robot vision system and an open-source development environment running on a Human Support Robot simulator. The large language model powered task planner selects appropriate primitive skills to perform the task requested by users. The team aims to design a home service robot that can assist humans in their homes and continuously attends competitions to evaluate and improve the developed system.
Performance Evaluation of a Full-Duplex UWA System in Lake Experiments
Jan 18, 2024



In this work we present a full-duplex (FD) underwater acoustic (UWA) communication system simultaneously transmitting and receiving acoustic signals in the same frequency bandwidth. To simplify the FD hardware, the system exploits a recently designed transducer capable of simultaneously transmitting and receiving signals. The key challenge of implementing an FD system is to cancel at the near-end receiver the strong self-interference (SI) from the near-end transmitter. By using advanced adaptive filtering algorithms providing high accuracy channel estimates, a high level of SI cancellation can be achieved when the far-end signal is absent. However, the SI channel estimation performance is limited in FD scenarios since the far-end signal acts as an interference when estimating the near-end SI channel. In this paper, we propose an FD UWA communication system which alternates between the SI cancellation and far-end data demodulation. An adaptive Rake combiner with multipath interference cancellation is implemented to improve the demodulation performance in time-varying multipath channels. The performance of the FD UWA system is evaluated in lake experiments. It is shown that the proposed adaptive Rake combiner with multipath interference cancellation significantly outperforms the conventional Rake combiner in all the experiments. The experimental results demonstrate that, with the new Rake combiner, the detection performance of the proposed FD UWA system is comparable with that of the half-duplex system.
Interference Cancellation for UWA Random Access Data Packet Transmission
Jan 18, 2024In underwater acoustic (UWA) random access communication networks with multiple users and data packet transmissions, the packet collisions are the main cause of the network performance degradation. The aim of this paper is to investigate interference cancellation (IC) techniques capable of resolving such collisions in a low-complexity modem with single-carrier modulation and single transducer. More specifically, in this modem, the IC is used at multiple stages of the receiver. Firstly, the IC is performed for cancelling the multipath interference to improve the equalization performance in comparison with the linear equalization and Rake combining. Secondly, the IC removes the interference from collided data packets within extracted signal segments after identifying the collisions. Finally, the IC is applied to the received baseband signal to improve the data packet detection. The modem performance is investigated in a lake experiment with intensive multipath channels. The experimental results demonstrate high detection performance of the proposed modem design and show that the proposed IC techniques can significantly improve the throughput of random access UWA networks.
Target detection using underwater acoustic communication links
Dec 18, 2023


Underwater monitoring and surveillance systems are essential for underwater target detection, localization and classification. The aim of this work is to investigate the possibility of target detection by using data transmission between communication nodes in an underwater acoustic (UWA) network, i.e, re-using acoustic communication signals for target detection. A new target detection method based on estimation of the time-varying channel impulse response between the communication transmitter(s) and receiver(s) is proposed and investigated. This is based on a lake experiment and numerical experiments using a simulator developed for modeling the time-varying UWA channel in the presence of a moving target. The proposed detection method provides a clear indication of a target crossing the communication link. A good similarity between results obtained in the numerical and lake experiments is observed.
Hibikino-Musashi@Home 2023 Team Description Paper
Oct 19, 2023This paper describes an overview of the techniques of Hibikino-Musashi@Home, which intends to participate in the domestic standard platform league. The team has developed a dataset generator for the training of a robot vision system and an open-source development environment running on a human support robot simulator. The robot system comprises self-developed libraries including those for motion synthesis and open-source software works on the robot operating system. The team aims to realize a home service robot that assists humans in a home, and continuously attend the competition to evaluate the developed system. The brain-inspired artificial intelligence system is also proposed for service robots which are expected to work in a real home environment.
Uncertainty-Aware Lung Nodule Segmentation with Multiple Annotations
Oct 24, 2021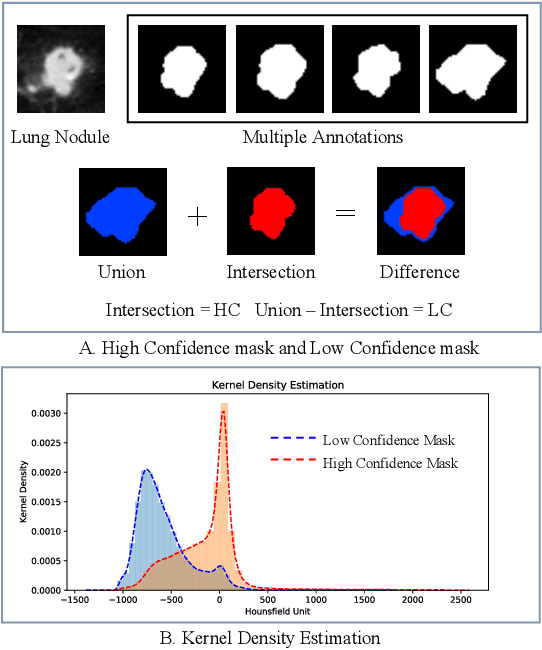
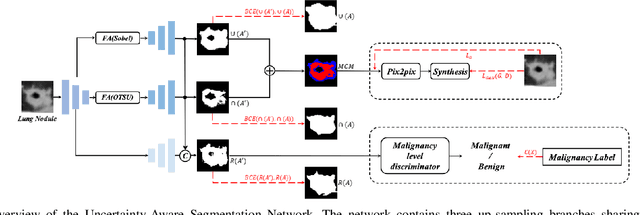
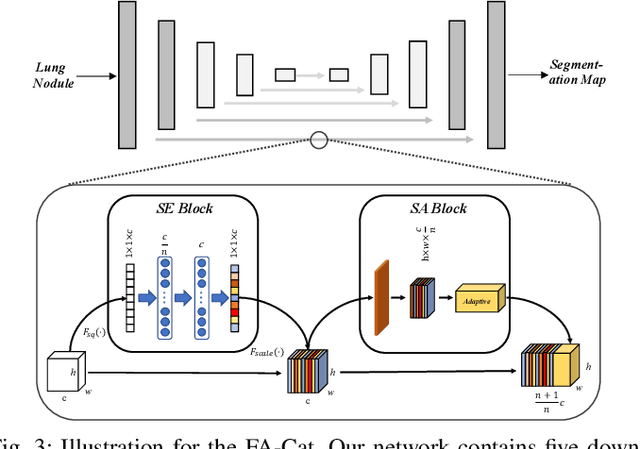
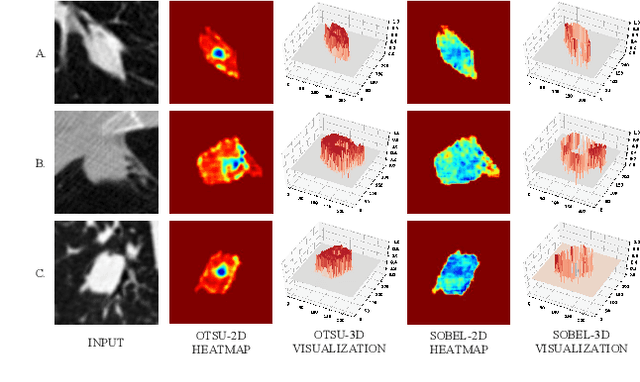
Since radiologists have different training and clinical experience, they may provide various segmentation maps for a lung nodule. As a result, for a specific lung nodule, some regions have a higher chance of causing segmentation uncertainty, which brings difficulty for lung nodule segmentation with multiple annotations. To address this problem, this paper proposes an Uncertainty-Aware Segmentation Network (UAS-Net) based on multi-branch U-Net, which can learn the valuable visual features from the regions that may cause segmentation uncertainty and contribute to a better segmentation result. Meanwhile, this network can provide a Multi-Confidence Mask (MCM) simultaneously, pointing out regions with different segmentation uncertainty levels. We introduce a Feature-Aware Concatenation structure for different learning targets and let each branch have a specific learning preference. Moreover, a joint adversarial learning process is also adopted to help learn discriminative features of complex structures. Experimental results show that our method can predict the reasonable regions with higher uncertainty and improve lung nodule segmentation performance in LIDC-IDRI.
Estimating air quality co-benefits of energy transition using machine learning
May 29, 2021Estimating health benefits of reducing fossil fuel use from improved air quality provides important rationales for carbon emissions abatement. Simulating pollution concentration is a crucial step of the estimation, but traditional approaches often rely on complicated chemical transport models that require extensive expertise and computational resources. In this study, we develop a novel and succinct machine learning framework that is able to provide precise and robust annual average fine particle (PM2.5) concentration estimations directly from a high-resolution fossil energy use data set. The accessibility and applicability of this framework show great potentials of machine learning approaches for integrated assessment studies. Applications of the framework with Chinese data reveal highly heterogeneous health benefits of reducing fossil fuel use in different sectors and regions in China with a mean of \$34/tCO2 and a standard deviation of \$84/tCO2. Reducing rural and residential coal use offers the highest co-benefits with a mean of \$360/tCO2. Our findings prompt careful policy designs to maximize cost-effectiveness in the transition towards a carbon-neutral energy system.