 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHibikino-Musashi@Home 2024 Team Description Paper
Oct 08, 2024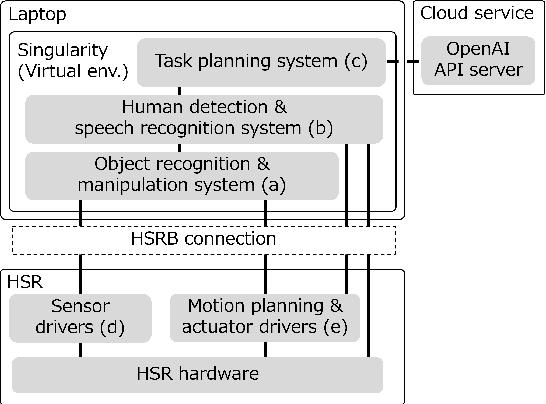
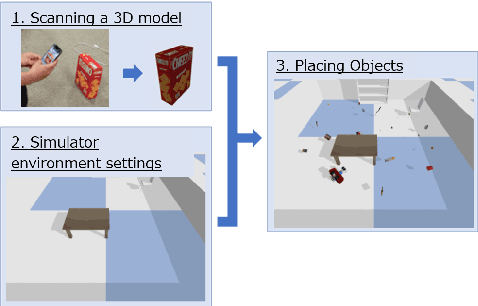
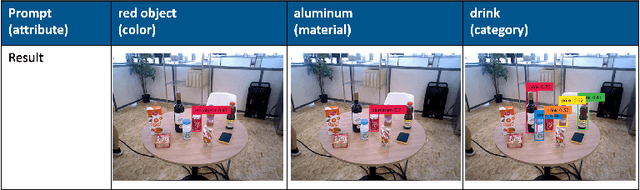
This paper provides an overview of the techniques employed by Hibikino-Musashi@Home, which intends to participate in the domestic standard platform league. The team has developed a dataset generator for training a robot vision system and an open-source development environment running on a Human Support Robot simulator. The large language model powered task planner selects appropriate primitive skills to perform the task requested by users. The team aims to design a home service robot that can assist humans in their homes and continuously attends competitions to evaluate and improve the developed system.
Haptic in-sensor computing device made of carbon nanotube-polydimethylsiloxane nanocomposites
Jun 06, 2024The importance of haptic in-sensor computing devices has been increasing. In this study, we successfully fabricated a haptic sensor with a hierarchical structure via the sacrificial template method, using carbon nanotubes-polydimethylsiloxane (CNTs-PDMS) nanocomposites for in-sensor computing applications. The CNTs-PDMS nanocomposite sensors, with different sensitivities, were obtained by varying the amount of CNTs. We transformed the input stimuli into higher-dimensional information, enabling a new path for the CNTs-PDMS nanocomposite application, which was implemented on a robotic hand as an in-sensor computing device by applying a reservoir computing paradigm. The nonlinear output data obtained from the sensors were trained using linear regression and used to classify nine different objects used in everyday life with an object recognition accuracy of >80 % for each object. This approach could enable tactile sensation in robots while reducing the computational cost.
Hibikino-Musashi@Home 2023 Team Description Paper
Oct 19, 2023This paper describes an overview of the techniques of Hibikino-Musashi@Home, which intends to participate in the domestic standard platform league. The team has developed a dataset generator for the training of a robot vision system and an open-source development environment running on a human support robot simulator. The robot system comprises self-developed libraries including those for motion synthesis and open-source software works on the robot operating system. The team aims to realize a home service robot that assists humans in a home, and continuously attend the competition to evaluate the developed system. The brain-inspired artificial intelligence system is also proposed for service robots which are expected to work in a real home environment.
Hibikino-Musashi@Home 2022 Team Description Paper
Nov 12, 2022



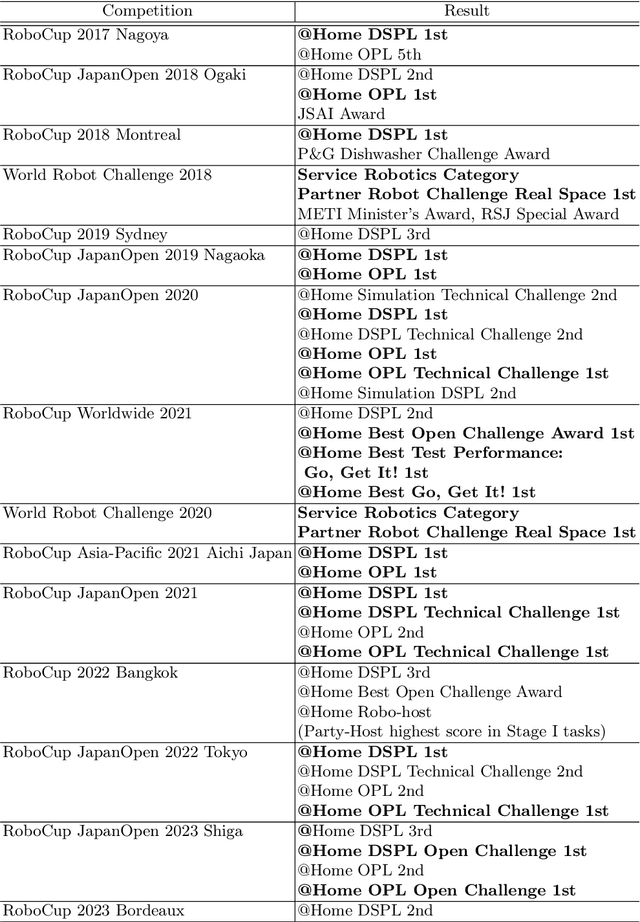
Our team, Hibikino-Musashi@Home (HMA), was founded in 2010. It is based in Japan in the Kitakyushu Science and Research Park. Since 2010, we have annually participated in the RoboCup@Home Japan Open competition in the open platform league (OPL).We participated as an open platform league team in the 2017 Nagoya RoboCup competition and as a domestic standard platform league (DSPL) team in the 2017 Nagoya, 2018 Montreal, 2019 Sydney, and 2021 Worldwide RoboCup competitions.We also participated in theWorld Robot Challenge (WRC) 2018 in the service-robotics category of the partner-robot challenge (real space) and won first place. Currently, we have 27 members from nine different laboratories within the Kyushu Institute of Technology and the university of Kitakyushu. In this paper, we introduce the activities that have been performed by our team and the technologies that we use.
Hibikino-Musashi@Home 2020 Team Description Paper
May 29, 2020
Our team, Hibikino-Musashi@Home (HMA), was founded in 2010. It is based in Japan in the Kitakyushu Science and Research Park. Since 2010, we have annually participated in the RoboCup@Home Japan Open competition in the open platform league (OPL). We participated as an open platform league team in the 2017 Nagoya RoboCup competition and as a domestic standard platform league (DSPL) team in the 2017 Nagoya, 2018 Montreal, and 2019 Sydney RoboCup competitions. We also participated in the World Robot Challenge (WRC) 2018 in the service-robotics category of the partner-robot challenge (real space) and won first place. Currently, we have 20 members from eight different laboratories within the Kyushu Institute of Technology. In this paper, we introduce the activities that have been performed by our team and the technologies that we use.