 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Shape Estimation of Tensegrity Structures Using Strut Inclination Angles
Apr 16, 2025Tensegrity structures are becoming widely used in robotics, such as continuously bending soft manipulators and mobile robots to explore unknown and uneven environments dynamically. Estimating their shape, which is the foundation of their state, is essential for establishing control. However, on-board sensor-based shape estimation remains difficult despite its importance, because tensegrity structures lack well-defined joints, which makes it challenging to use conventional angle sensors such as potentiometers or encoders for shape estimation. To our knowledge, no existing work has successfully achieved shape estimation using only onboard sensors such as Inertial Measurement Units (IMUs). This study addresses this issue by proposing a novel approach that uses energy minimization to estimate the shape. We validated our method through experiments on a simple Class 1 tensegrity structure, and the results show that the proposed algorithm can estimate the real-time shape of the structure using onboard sensors, even in the presence of external disturbances.
Haptic in-sensor computing device made of carbon nanotube-polydimethylsiloxane nanocomposites
Jun 06, 2024The importance of haptic in-sensor computing devices has been increasing. In this study, we successfully fabricated a haptic sensor with a hierarchical structure via the sacrificial template method, using carbon nanotubes-polydimethylsiloxane (CNTs-PDMS) nanocomposites for in-sensor computing applications. The CNTs-PDMS nanocomposite sensors, with different sensitivities, were obtained by varying the amount of CNTs. We transformed the input stimuli into higher-dimensional information, enabling a new path for the CNTs-PDMS nanocomposite application, which was implemented on a robotic hand as an in-sensor computing device by applying a reservoir computing paradigm. The nonlinear output data obtained from the sensors were trained using linear regression and used to classify nine different objects used in everyday life with an object recognition accuracy of >80 % for each object. This approach could enable tactile sensation in robots while reducing the computational cost.
Multimodal Learning of Soft Robot Dynamics using Differentiable Filters
Nov 12, 2023



Differentiable Filters, as recursive Bayesian estimators, possess the ability to learn complex dynamics by deriving state transition and measurement models exclusively from data. This data-driven approach eliminates the reliance on explicit analytical models while maintaining the essential algorithmic components of the filtering process. However, the gain mechanism remains non-differentiable, limiting its adaptability to specific task requirements and contextual variations. To address this limitation, this paper introduces an innovative approach called {\alpha}-MDF (Attention-based Multimodal Differentiable Filter). {\alpha}-MDF leverages modern attention mechanisms to learn multimodal latent representations for accurate state estimation in soft robots. By incorporating attention mechanisms, {\alpha}-MDF offers the flexibility to tailor the gain mechanism to the unique nature of the task and context. The effectiveness of {\alpha}-MDF is validated through real-world state estimation tasks on soft robots. Our experimental results demonstrate significant reductions in state estimation errors, consistently surpassing differentiable filter baselines by up to 45% in the domain of soft robotics.
Learning Soft Robot Dynamics using Differentiable Kalman Filters and Spatio-Temporal Embeddings
Aug 19, 2023



This paper introduces a novel approach for modeling the dynamics of soft robots, utilizing a differentiable filter architecture. The proposed approach enables end-to-end training to learn system dynamics, noise characteristics, and temporal behavior of the robot. A novel spatio-temporal embedding process is discussed to handle observations with varying sensor placements and sampling frequencies. The efficacy of this approach is demonstrated on a tensegrity robot arm by learning end-effector dynamics from demonstrations with complex bending motions. The model is proven to be robust against missing modalities, diverse sensor placement, and varying sampling rates. Additionally, the proposed framework is shown to identify physical interactions with humans during motion. The utilization of a differentiable filter presents a novel solution to the difficulties of modeling soft robot dynamics. Our approach shows substantial improvement in accuracy compared to state-of-the-art filtering methods, with at least a 24% reduction in mean absolute error (MAE) observed. Furthermore, the predicted end-effector positions show an average MAE of 25.77mm from the ground truth, highlighting the advantage of our approach. The code is available at https://github.com/ir-lab/soft_robot_DEnKF.
Variational Autoencoder Trajectory Primitives with Continuous and Discrete Latent Codes
Dec 09, 2019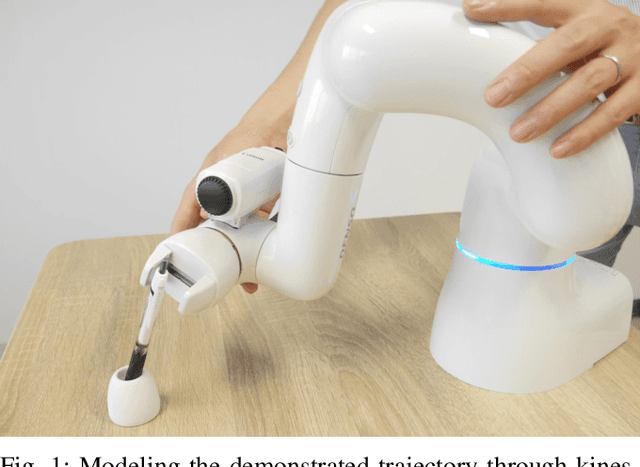
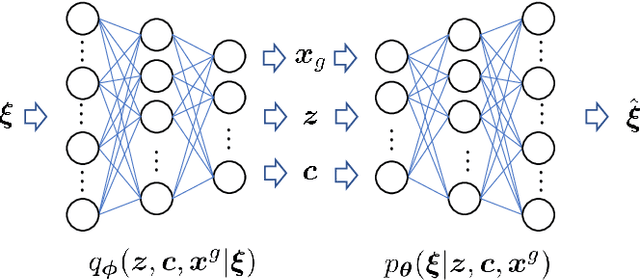
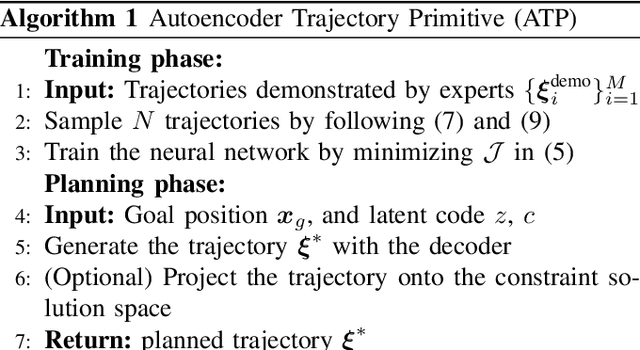
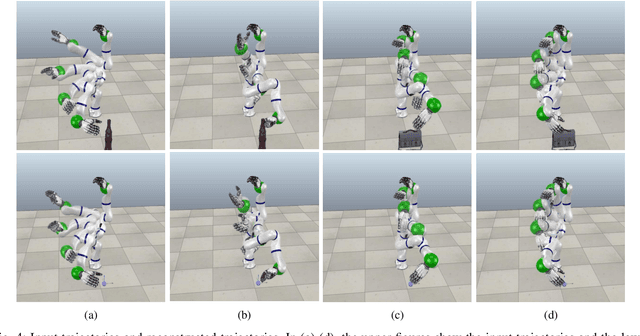
Imitation learning is an intuitive approach for teaching motion to robotic systems. Although previous studies have proposed various methods to model demonstrated movement primitives, one of the limitations of existing methods is that it is not trivial to modify their planned trajectory once the model is learned. The trajectory of a robotic manipulator is often high-dimensional, and it is not easy to tune the shape of the planned trajectory in an intuitive manner. We address this problem by learning the latent space of the robot trajectory. If the latent variable of the trajectories can be learned, it can be used to tune the trajectory in an intuitive manner even when the user is an expert. We propose a framework for modeling demonstrated trajectories with a neural network that learns the low-dimensional latent space. Our neural network structure is built on the variational autoencoder (VAE) with discrete and continuous latent variables. We extend the structure of the existing VAE to obtain the decoder that is conditioned on the goal position of the trajectory for generalization to different goal positions. To cope with requirement of the massive training data, we use a trajectory augmentation technique inspired by the data augmentation commonly used in the computer vision community. In the proposed framework, the latent variables that encodes the multiple types of trajectories are learned in an unsupervised manner. The learned decoder can be used as a motion planner in which the user can specify the goal position and the trajectory types by setting the latent variables. The experimental results show that our neural network can be trained using a limited number of demonstrated trajectories and that the interpretable latent representations can be learned.
Learning Interactive Behaviors for Musculoskeletal Robots Using Bayesian Interaction Primitives
Aug 15, 2019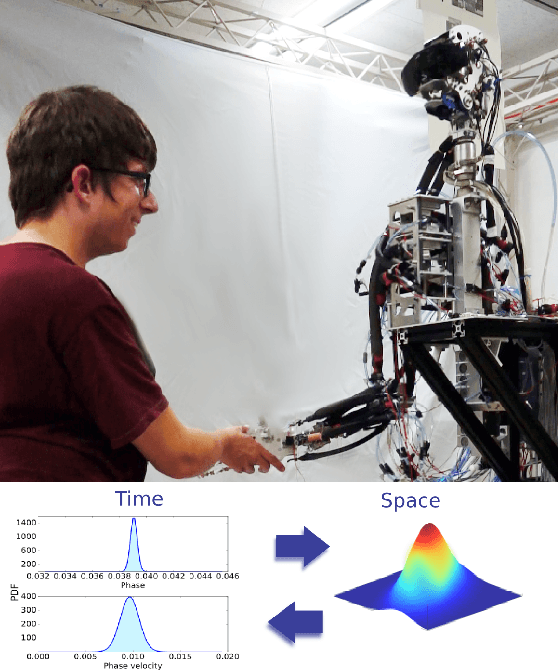
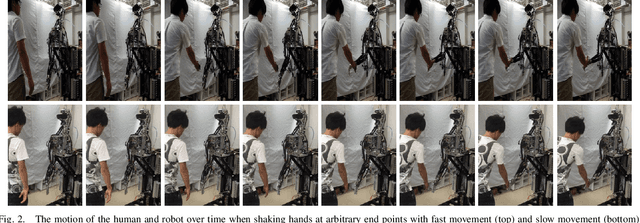
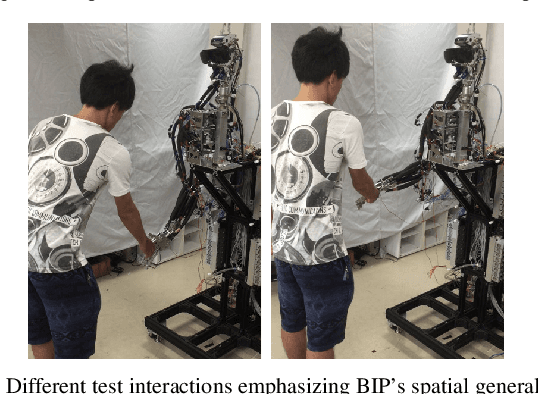
Musculoskeletal robots that are based on pneumatic actuation have a variety of properties, such as compliance and back-drivability, that render them particularly appealing for human-robot collaboration. However, programming interactive and responsive behaviors for such systems is extremely challenging due to the nonlinearity and uncertainty inherent to their control. In this paper, we propose an approach for learning Bayesian Interaction Primitives for musculoskeletal robots given a limited set of example demonstrations. We show that this approach is capable of real-time state estimation and response generation for interaction with a robot for which no analytical model exists. Human-robot interaction experiments on a 'handshake' task show that the approach generalizes to new positions, interaction partners, and movement velocities.
Local Online Motor Babbling: Learning Motor Abundance of A Musculoskeletal Robot Arm
Jun 21, 2019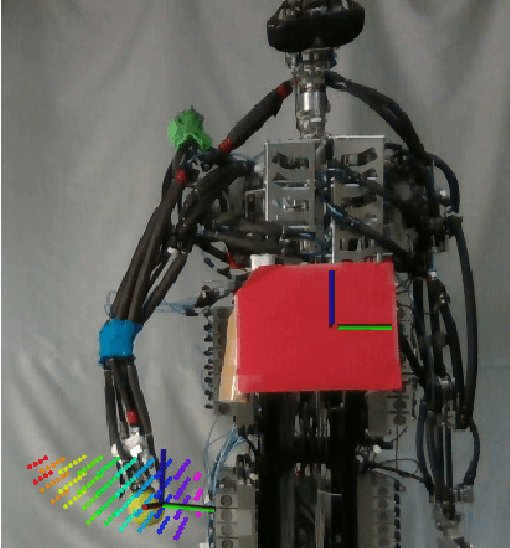
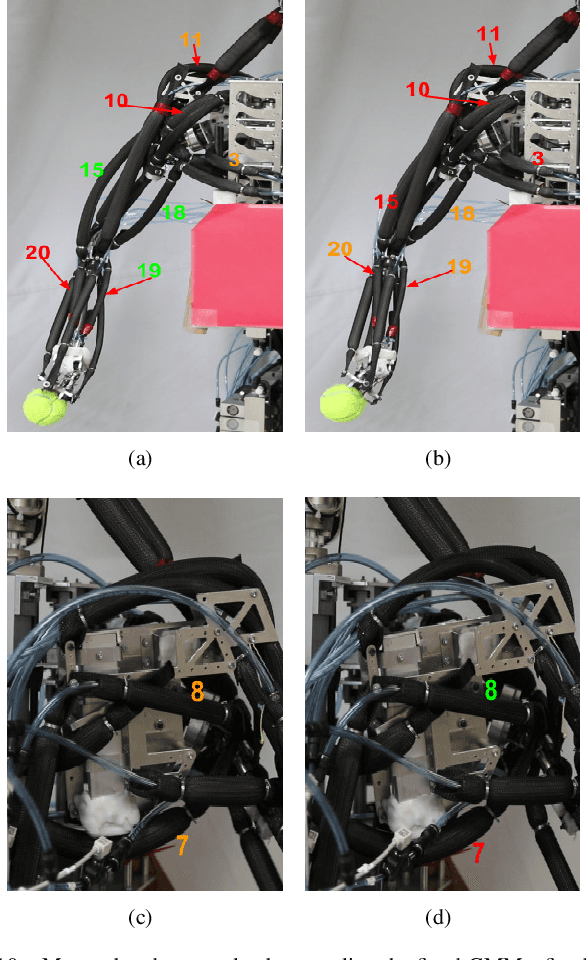
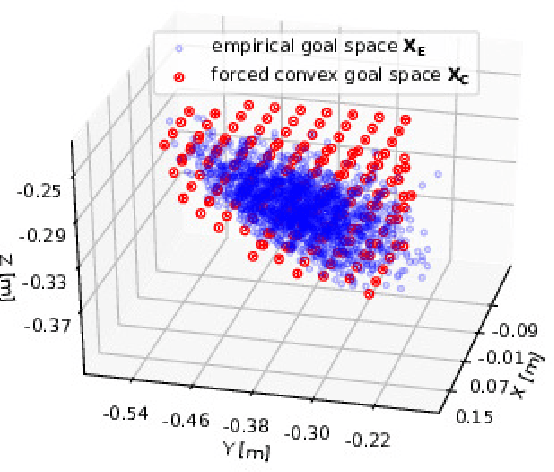
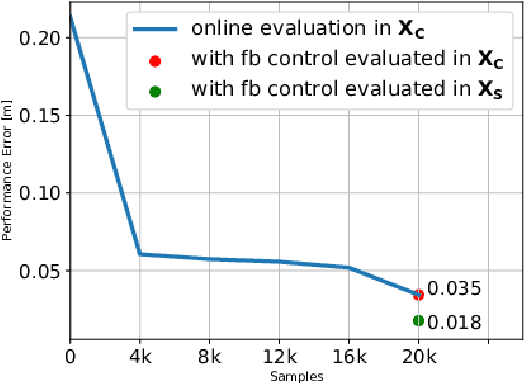
Motor babbling and goal babbling has been used for sensorimotor learning of highly redundant systems in soft robotics. Recent works in goal babbling has demonstrated successful learning of inverse kinematics (IK) on such systems, and suggests that babbling in the goal space better resolves motor redundancy by learning as few sensorimotor mapping as possible. However, for musculoskeletal robot systems, motor redundancy can be of useful information to explain muscle activation patterns, thus the term motor abundance. In this work, we introduce some simple heuristics to empirically define the unknown goal space, and learn the inverse kinematics of a 10 DoF musculoskeletal robot arm using directed goal babbling. We then further propose local online motor babbling using Covariance Matrix Adaptation Evolution Strategy (CMA-ES), which bootstraps on the collected samples in goal babbling for initialization, such that motor abundance can be queried for any static goal within the defined goal space. The result shows that our motor babbling approach can efficiently explore motor abundance, and gives useful insights in terms of muscle stiffness and synergy.