 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Interactive Behaviors for Musculoskeletal Robots Using Bayesian Interaction Primitives
Paper and Code
Aug 15, 2019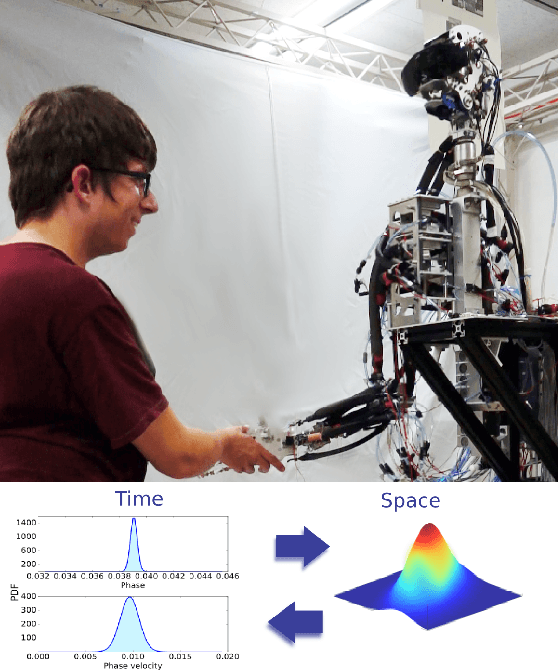
Musculoskeletal robots that are based on pneumatic actuation have a variety of properties, such as compliance and back-drivability, that render them particularly appealing for human-robot collaboration. However, programming interactive and responsive behaviors for such systems is extremely challenging due to the nonlinearity and uncertainty inherent to their control. In this paper, we propose an approach for learning Bayesian Interaction Primitives for musculoskeletal robots given a limited set of example demonstrations. We show that this approach is capable of real-time state estimation and response generation for interaction with a robot for which no analytical model exists. Human-robot interaction experiments on a 'handshake' task show that the approach generalizes to new positions, interaction partners, and movement velocities.