 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExternal Photoreflective Tactile Sensing Based on Surface Deformation Measurement
Nov 09, 2025We present a tactile sensing method enabled by the mechanical compliance of soft robots; an externally attachable photoreflective module reads surface deformation of silicone skin to estimate contact force without embedding tactile transducers. Locating the sensor off the contact interface reduces damage risk, preserves softness, and simplifies fabrication and maintenance. We first characterize the optical sensing element and the compliant skin, thendetermine the design of a prototype tactile sensor. Compression experiments validate the approach, exhibiting a monotonic force output relationship consistent with theory, low hysteresis, high repeatability over repeated cycles, and small response indentation speeds. We further demonstrate integration on a soft robotic gripper, where the module reliably detects grasp events. Compared with liquid filled or wireembedded tactile skins, the proposed modular add on architecture enhances durability, reduces wiring complexity, and supports straightforward deployment across diverse robot geometries. Because the sensing principle reads skin strain patterns, it also suggests extensions to other somatosensory cues such as joint angle or actuator state estimation from surface deformation. Overall, leveraging surface compliance with an external optical module provides a practical and robust route to equip soft robots with force perception while preserving structural flexibility and manufacturability, paving the way for robotic applications and safe human robot collaboration.
Learning Interactive Behaviors for Musculoskeletal Robots Using Bayesian Interaction Primitives
Aug 15, 2019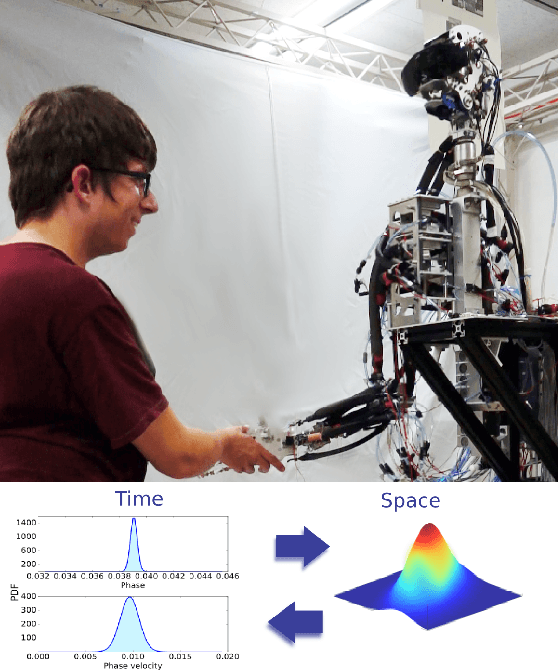
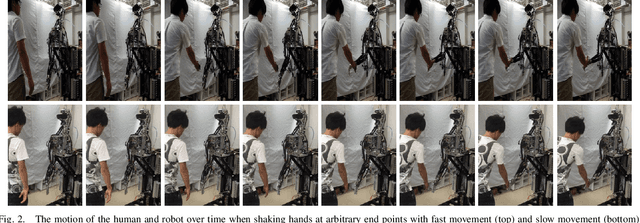
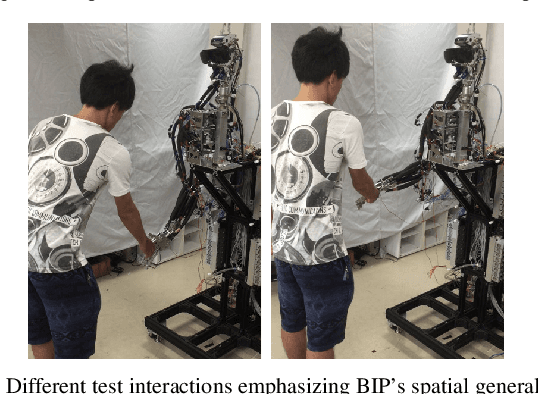
Musculoskeletal robots that are based on pneumatic actuation have a variety of properties, such as compliance and back-drivability, that render them particularly appealing for human-robot collaboration. However, programming interactive and responsive behaviors for such systems is extremely challenging due to the nonlinearity and uncertainty inherent to their control. In this paper, we propose an approach for learning Bayesian Interaction Primitives for musculoskeletal robots given a limited set of example demonstrations. We show that this approach is capable of real-time state estimation and response generation for interaction with a robot for which no analytical model exists. Human-robot interaction experiments on a 'handshake' task show that the approach generalizes to new positions, interaction partners, and movement velocities.
Local Online Motor Babbling: Learning Motor Abundance of A Musculoskeletal Robot Arm
Jun 21, 2019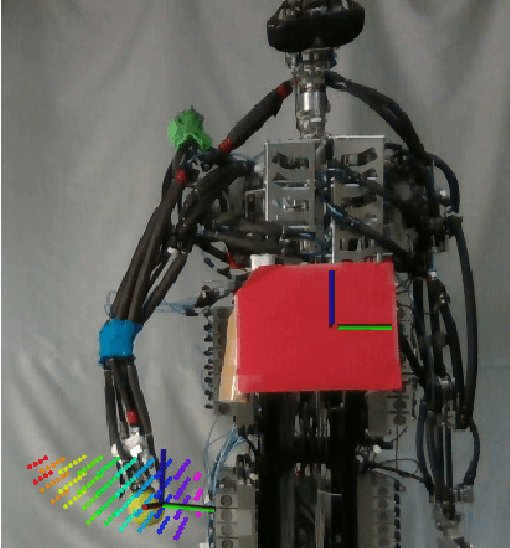
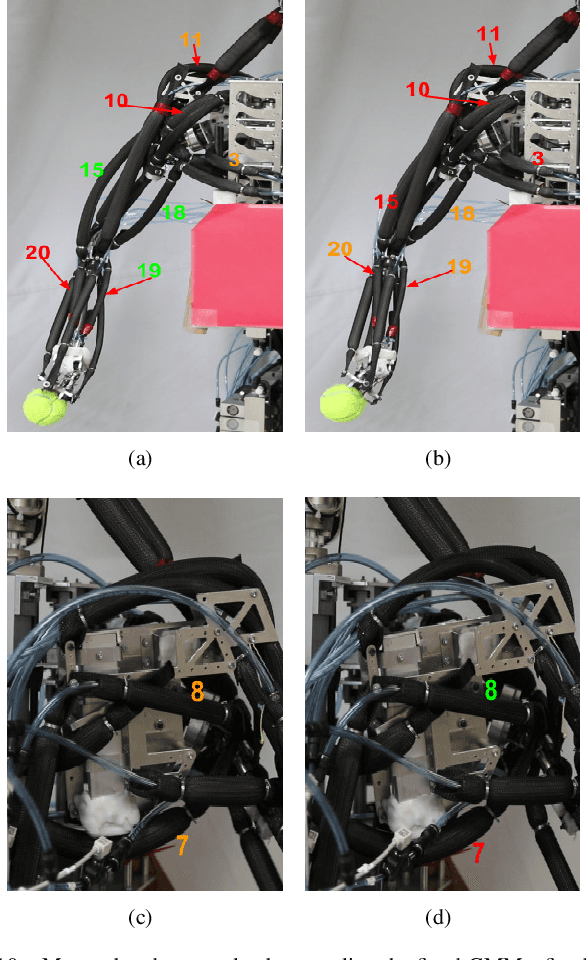
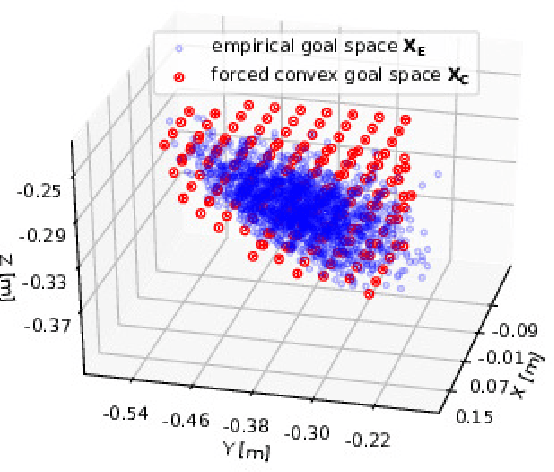
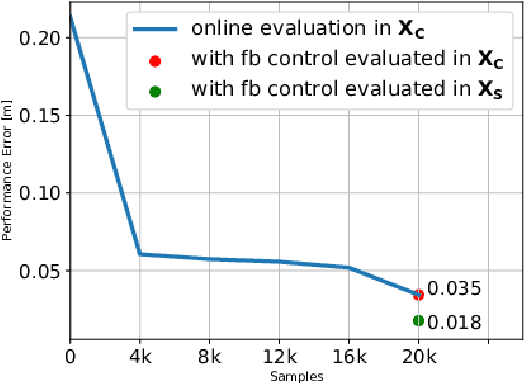
Motor babbling and goal babbling has been used for sensorimotor learning of highly redundant systems in soft robotics. Recent works in goal babbling has demonstrated successful learning of inverse kinematics (IK) on such systems, and suggests that babbling in the goal space better resolves motor redundancy by learning as few sensorimotor mapping as possible. However, for musculoskeletal robot systems, motor redundancy can be of useful information to explain muscle activation patterns, thus the term motor abundance. In this work, we introduce some simple heuristics to empirically define the unknown goal space, and learn the inverse kinematics of a 10 DoF musculoskeletal robot arm using directed goal babbling. We then further propose local online motor babbling using Covariance Matrix Adaptation Evolution Strategy (CMA-ES), which bootstraps on the collected samples in goal babbling for initialization, such that motor abundance can be queried for any static goal within the defined goal space. The result shows that our motor babbling approach can efficiently explore motor abundance, and gives useful insights in terms of muscle stiffness and synergy.