 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLMind: Bio-inspired Training-free Adaptive Visual Representations for Vision-Language Models
Mar 16, 2026Vision-Language Models (VLMs) typically assume a uniform spatial fidelity across the entire field of view of visual inputs, dedicating equal precision to even the uninformative regions. By contrast, human vision is neither uniform nor static; it is adaptive, selective, and resource-efficient. In light of this, we present the first systematic analysis of bio-inspired visual representation methods, providing insights for more efficient and adaptive VLMs. We propose LLMind (Looking Like the Mind), a novel training-free framework that mimics foveated encoding and cortical magnification in human vision to achieve adaptive, efficient representations for VLMs under tight pixel budgets. Our key idea is to explore a Bio-inspired Adaptive Sampling Strategy (BASS), enabling a Mobius-parameterized module that performs non-uniform sampling while preserving global scene structure. On top of BASS, we introduce closed-loop semantic feedback (CSF) via test-time adaptation to align perceptual saliency with textual information from the frozen VLM. We evaluate LLMind against uniform and other sampling baselines across diverse scene-level and region-guided visual question answering benchmarks. The results show dramatic gains, with average improvements of +20% on VQAv2, +38% on Seed-Bench, and +37% on A-OKVQA compared to uniform sampling under tight pixel budgets. More surprisingly, LLMind retains up to 82%, 92%, and 97% of the full-resolution performance using only 1%, 3%, and 5% of the pixels, respectively. Moreover, LLMind is lightweight, plug-and-play, and compatible with existing VLMs without requiring architectural changes.
Nature's Insight: A Novel Framework and Comprehensive Analysis of Agentic Reasoning Through the Lens of Neuroscience
May 07, 2025Autonomous AI is no longer a hard-to-reach concept, it enables the agents to move beyond executing tasks to independently addressing complex problems, adapting to change while handling the uncertainty of the environment. However, what makes the agents truly autonomous? It is agentic reasoning, that is crucial for foundation models to develop symbolic logic, statistical correlations, or large-scale pattern recognition to process information, draw inferences, and make decisions. However, it remains unclear why and how existing agentic reasoning approaches work, in comparison to biological reasoning, which instead is deeply rooted in neural mechanisms involving hierarchical cognition, multimodal integration, and dynamic interactions. In this work, we propose a novel neuroscience-inspired framework for agentic reasoning. Grounded in three neuroscience-based definitions and supported by mathematical and biological foundations, we propose a unified framework modeling reasoning from perception to action, encompassing four core types, perceptual, dimensional, logical, and interactive, inspired by distinct functional roles observed in the human brain. We apply this framework to systematically classify and analyze existing AI reasoning methods, evaluating their theoretical foundations, computational designs, and practical limitations. We also explore its implications for building more generalizable, cognitively aligned agents in physical and virtual environments. Finally, building on our framework, we outline future directions and propose new neural-inspired reasoning methods, analogous to chain-of-thought prompting. By bridging cognitive neuroscience and AI, this work offers a theoretical foundation and practical roadmap for advancing agentic reasoning in intelligent systems. The associated project can be found at: https://github.com/BioRAILab/Awesome-Neuroscience-Agent-Reasoning .
From Pixels to Tokens: Revisiting Object Hallucinations in Large Vision-Language Models
Oct 09, 2024



Hallucinations in large vision-language models (LVLMs) are a significant challenge, i.e., generating objects that are not presented in the visual input, which impairs their reliability. Recent studies often attribute hallucinations to a lack of understanding of visual input, yet ignore a more fundamental issue: the model's inability to effectively extract or decouple visual features. In this paper, we revisit the hallucinations in LVLMs from an architectural perspective, investigating whether the primary cause lies in the visual encoder (feature extraction) or the modal alignment module (feature decoupling). Motivated by our findings on the preliminary investigation, we propose a novel tuning strategy, PATCH, to mitigate hallucinations in LVLMs. This plug-and-play method can be integrated into various LVLMs, utilizing adaptive virtual tokens to extract object features from bounding boxes, thereby addressing hallucinations caused by insufficient decoupling of visual features. PATCH achieves state-of-the-art performance on multiple multi-modal hallucination datasets. We hope this approach provides researchers with deeper insights into the underlying causes of hallucinations in LVLMs, fostering further advancements and innovation in this field.
Local Online Motor Babbling: Learning Motor Abundance of A Musculoskeletal Robot Arm
Jun 21, 2019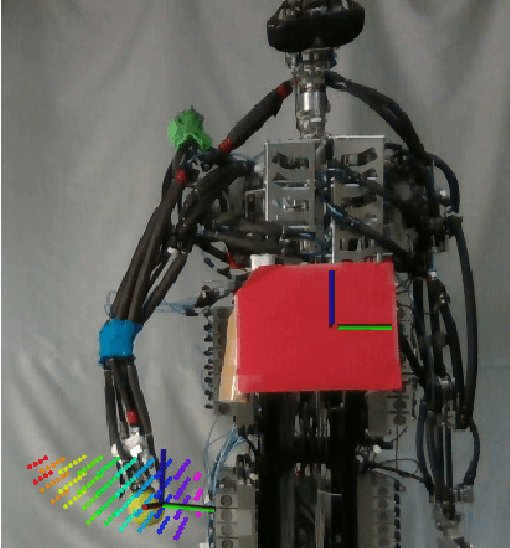
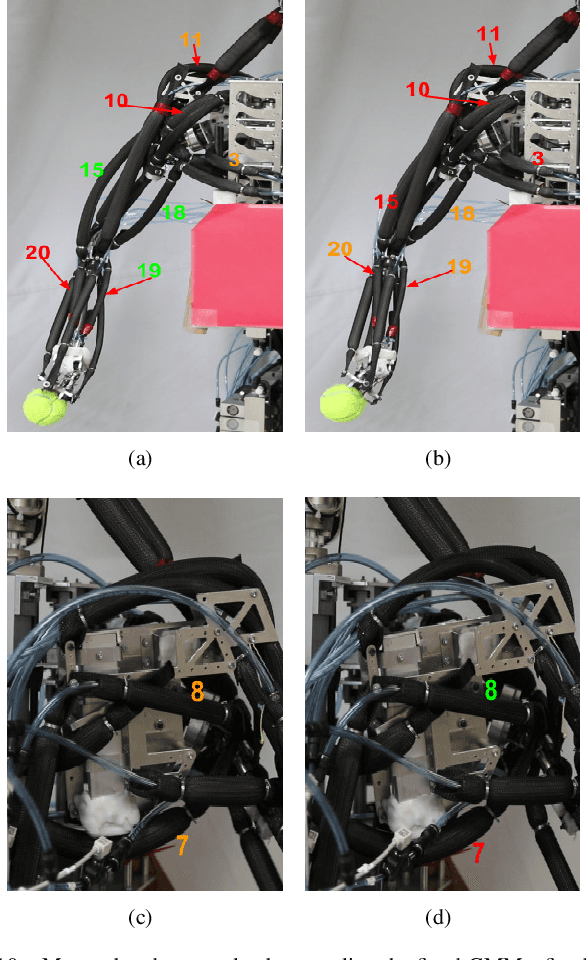
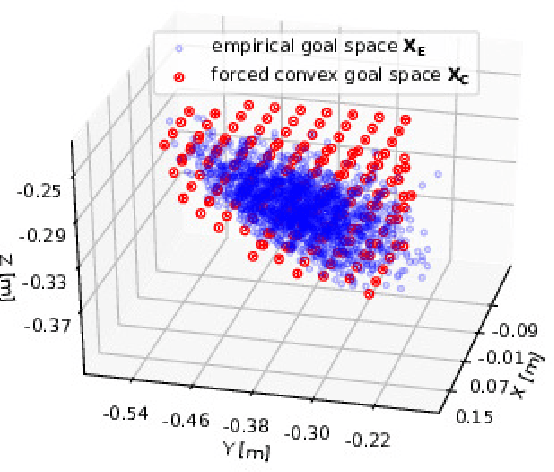
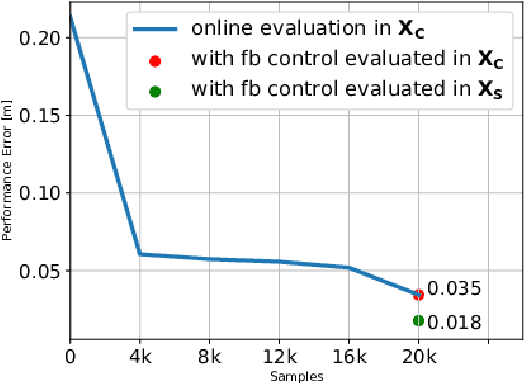
Motor babbling and goal babbling has been used for sensorimotor learning of highly redundant systems in soft robotics. Recent works in goal babbling has demonstrated successful learning of inverse kinematics (IK) on such systems, and suggests that babbling in the goal space better resolves motor redundancy by learning as few sensorimotor mapping as possible. However, for musculoskeletal robot systems, motor redundancy can be of useful information to explain muscle activation patterns, thus the term motor abundance. In this work, we introduce some simple heuristics to empirically define the unknown goal space, and learn the inverse kinematics of a 10 DoF musculoskeletal robot arm using directed goal babbling. We then further propose local online motor babbling using Covariance Matrix Adaptation Evolution Strategy (CMA-ES), which bootstraps on the collected samples in goal babbling for initialization, such that motor abundance can be queried for any static goal within the defined goal space. The result shows that our motor babbling approach can efficiently explore motor abundance, and gives useful insights in terms of muscle stiffness and synergy.
Learning walk and trot from the same objective using different types of exploration
Apr 28, 2019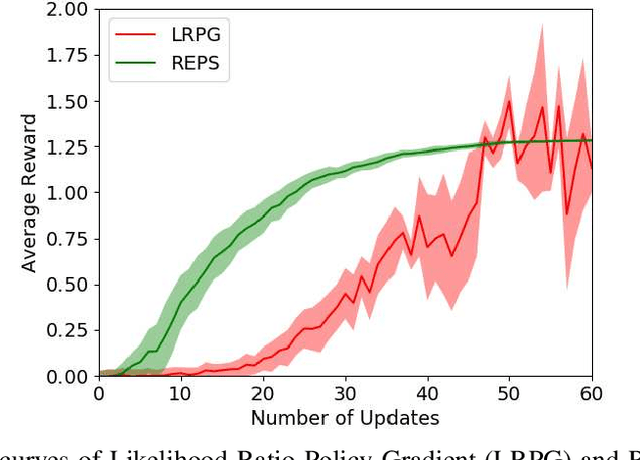
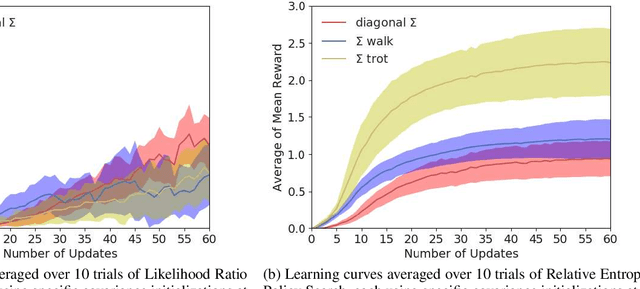
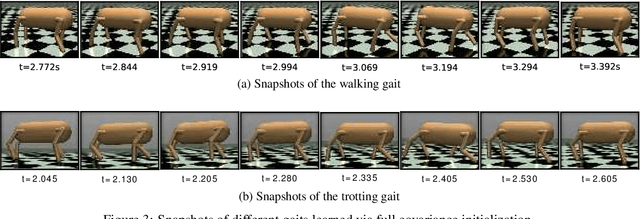
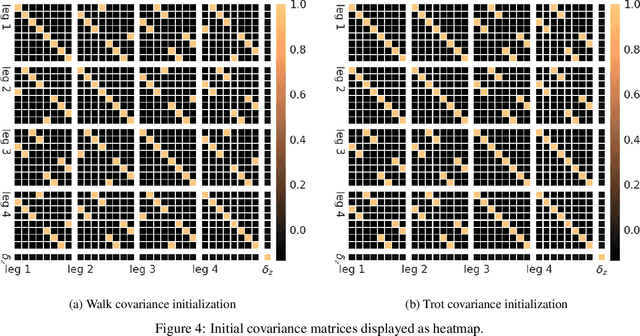
In quadruped gait learning, policy search methods that scale high dimensional continuous action spaces are commonly used. In most approaches, it is necessary to introduce prior knowledge on the gaits to limit the highly non-convex search space of the policies. In this work, we propose a new approach to encode the symmetry properties of the desired gaits, on the initial covariance of the Gaussian search distribution, allowing for strategic exploration. Using episode-based likelihood ratio policy gradient and relative entropy policy search, we learned the gaits walk and trot on a simulated quadruped. Comparing these gaits to random gaits learned by initialized diagonal covariance matrix, we show that the performance can be significantly enhanced.