 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariational Autoencoder Trajectory Primitives with Continuous and Discrete Latent Codes
Paper and Code
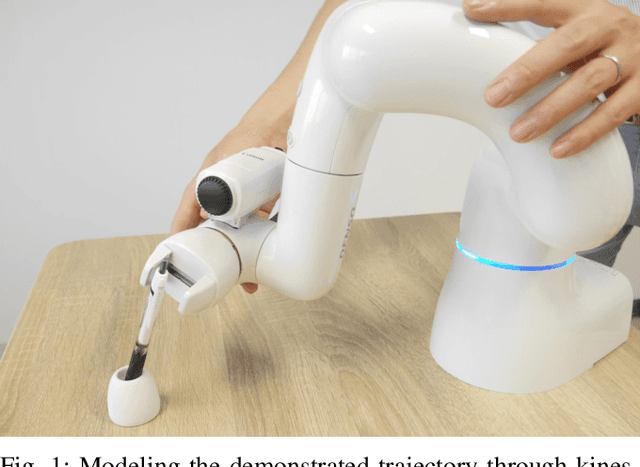
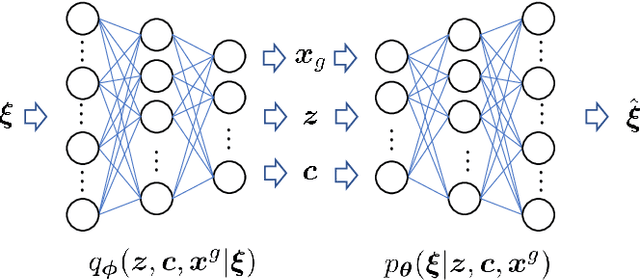
Imitation learning is an intuitive approach for teaching motion to robotic systems. Although previous studies have proposed various methods to model demonstrated movement primitives, one of the limitations of existing methods is that it is not trivial to modify their planned trajectory once the model is learned. The trajectory of a robotic manipulator is often high-dimensional, and it is not easy to tune the shape of the planned trajectory in an intuitive manner. We address this problem by learning the latent space of the robot trajectory. If the latent variable of the trajectories can be learned, it can be used to tune the trajectory in an intuitive manner even when the user is an expert. We propose a framework for modeling demonstrated trajectories with a neural network that learns the low-dimensional latent space. Our neural network structure is built on the variational autoencoder (VAE) with discrete and continuous latent variables. We extend the structure of the existing VAE to obtain the decoder that is conditioned on the goal position of the trajectory for generalization to different goal positions. To cope with requirement of the massive training data, we use a trajectory augmentation technique inspired by the data augmentation commonly used in the computer vision community. In the proposed framework, the latent variables that encodes the multiple types of trajectories are learned in an unsupervised manner. The learned decoder can be used as a motion planner in which the user can specify the goal position and the trajectory types by setting the latent variables. The experimental results show that our neural network can be trained using a limited number of demonstrated trajectories and that the interpretable latent representations can be learned.