 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhere Do We Look When We Teach? Analyzing Human Gaze Behavior Across Demonstration Devices in Robot Imitation Learning
Jun 06, 2025Imitation learning for acquiring generalizable policies often requires a large volume of demonstration data, making the process significantly costly. One promising strategy to address this challenge is to leverage the cognitive and decision-making skills of human demonstrators with strong generalization capability, particularly by extracting task-relevant cues from their gaze behavior. However, imitation learning typically involves humans collecting data using demonstration devices that emulate a robot's embodiment and visual condition. This raises the question of how such devices influence gaze behavior. We propose an experimental framework that systematically analyzes demonstrators' gaze behavior across a spectrum of demonstration devices. Our experimental results indicate that devices emulating (1) a robot's embodiment or (2) visual condition impair demonstrators' capability to extract task-relevant cues via gaze behavior, with the extent of impairment depending on the degree of emulation. Additionally, gaze data collected using devices that capture natural human behavior improves the policy's task success rate from 18.8% to 68.8% under environmental shifts.
Robust Imitation Learning for Mobile Manipulator Focusing on Task-Related Viewpoints and Regions
Oct 02, 2024



We study how to generalize the visuomotor policy of a mobile manipulator from the perspective of visual observations. The mobile manipulator is prone to occlusion owing to its own body when only a single viewpoint is employed and a significant domain shift when deployed in diverse situations. However, to the best of the authors' knowledge, no study has been able to solve occlusion and domain shift simultaneously and propose a robust policy. In this paper, we propose a robust imitation learning method for mobile manipulators that focuses on task-related viewpoints and their spatial regions when observing multiple viewpoints. The multiple viewpoint policy includes attention mechanism, which is learned with an augmented dataset, and brings optimal viewpoints and robust visual embedding against occlusion and domain shift. Comparison of our results for different tasks and environments with those of previous studies revealed that our proposed method improves the success rate by up to 29.3 points. We also conduct ablation studies using our proposed method. Learning task-related viewpoints from the multiple viewpoints dataset increases robustness to occlusion than using a uniquely defined viewpoint. Focusing on task-related regions contributes to up to a 33.3-point improvement in the success rate against domain shift.
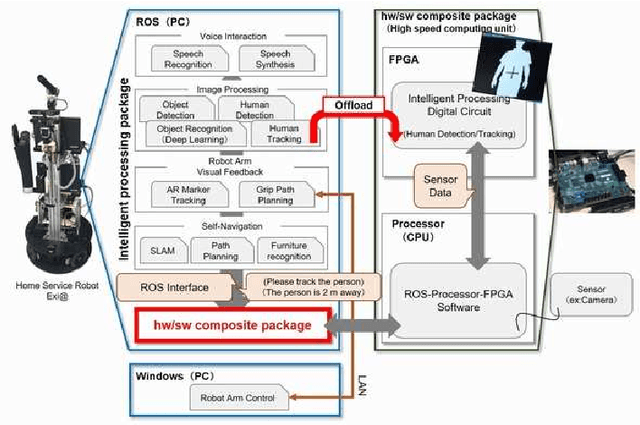
Hibikino-Musashi@Home 2018 Team Description Paper
Nov 09, 2022



Our team, Hibikino-Musashi@Home (the shortened name is HMA), was founded in 2010. It is based in the Kitakyushu Science and Research Park, Japan. We have participated in the RoboCup@Home Japan open competition open platform league every year since 2010. Moreover, we participated in the RoboCup 2017 Nagoya as open platform league and domestic standard platform league teams. Currently, the Hibikino-Musashi@Home team has 20 members from seven different laboratories based in the Kyushu Institute of Technology. In this paper, we introduce the activities of our team and the technologies.
Hibikino-Musashi@Home 2019 Team Description Paper
May 29, 2020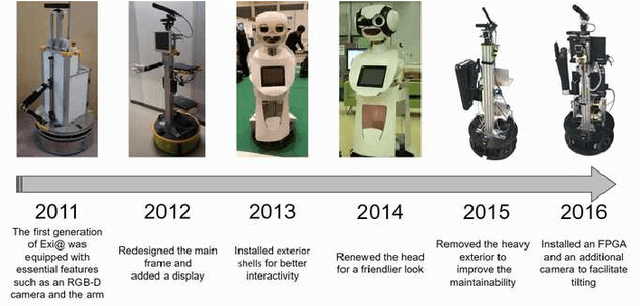
Our team, Hibikino-Musashi@Home (HMA), was founded in 2010. It is based in the Kitakyushu Science and Research Park, Japan. Since 2010, we have participated in the RoboCup@Home Japan Open competition open platform league annually. We have also participated in the RoboCup 2017 Nagoya as an open platform league and domestic standard platform league teams, and in the RoboCup 2018 Montreal as a domestic standard platform league team. Currently, we have 23 members from seven different laboratories based in Kyushu Institute of Technology. This paper aims to introduce the activities that are performed by our team and the technologies that we use.
Hibikino-Musashi@Home 2020 Team Description Paper
May 29, 2020Our team, Hibikino-Musashi@Home (HMA), was founded in 2010. It is based in Japan in the Kitakyushu Science and Research Park. Since 2010, we have annually participated in the RoboCup@Home Japan Open competition in the open platform league (OPL). We participated as an open platform league team in the 2017 Nagoya RoboCup competition and as a domestic standard platform league (DSPL) team in the 2017 Nagoya, 2018 Montreal, and 2019 Sydney RoboCup competitions. We also participated in the World Robot Challenge (WRC) 2018 in the service-robotics category of the partner-robot challenge (real space) and won first place. Currently, we have 20 members from eight different laboratories within the Kyushu Institute of Technology. In this paper, we introduce the activities that have been performed by our team and the technologies that we use.
Hibikino-Musashi@Home 2017 Team Description Paper
Nov 15, 2017Our team Hibikino-Musashi@Home was founded in 2010. It is based in Kitakyushu Science and Research Park, Japan. Since 2010, we have participated in the RoboCup@Home Japan open competition open-platform league every year. Currently, the Hibikino-Musashi@Home team has 24 members from seven different laboratories based in the Kyushu Institute of Technology. Our home-service robots are used as platforms for both education and implementation of our research outcomes. In this paper, we introduce our team and the technologies that we have implemented in our robots.