 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnified Understanding of Environment, Task, and Human for Human-Robot Interaction in Real-World Environments
Dec 18, 2024



To facilitate human--robot interaction (HRI) tasks in real-world scenarios, service robots must adapt to dynamic environments and understand the required tasks while effectively communicating with humans. To accomplish HRI in practice, we propose a novel indoor dynamic map, task understanding system, and response generation system. The indoor dynamic map optimizes robot behavior by managing an occupancy grid map and dynamic information, such as furniture and humans, in separate layers. The task understanding system targets tasks that require multiple actions, such as serving ordered items. Task representations that predefine the flow of necessary actions are applied to achieve highly accurate understanding. The response generation system is executed in parallel with task understanding to facilitate smooth HRI by informing humans of the subsequent actions of the robot. In this study, we focused on waiter duties in a restaurant setting as a representative application of HRI in a dynamic environment. We developed an HRI system that could perform tasks such as serving food and cleaning up while communicating with customers. In experiments conducted in a simulated restaurant environment, the proposed HRI system successfully communicated with customers and served ordered food with 90\% accuracy. In a questionnaire administered after the experiment, the HRI system of the robot received 4.2 points out of 5. These outcomes indicated the effectiveness of the proposed method and HRI system in executing waiter tasks in real-world environments.
Hibikino-Musashi@Home 2024 Team Description Paper
Oct 08, 2024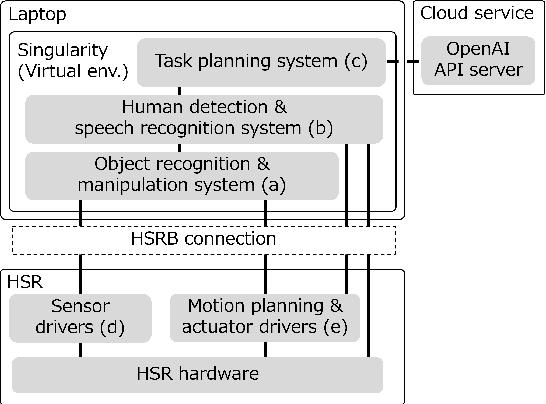
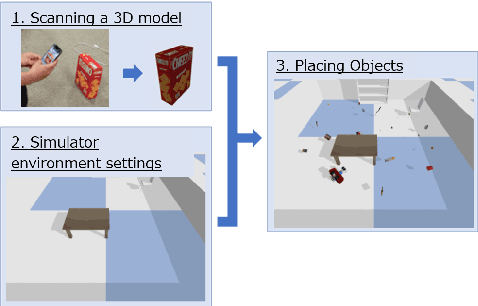
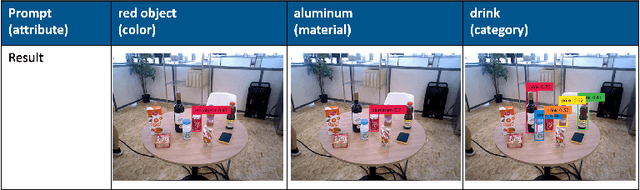
This paper provides an overview of the techniques employed by Hibikino-Musashi@Home, which intends to participate in the domestic standard platform league. The team has developed a dataset generator for training a robot vision system and an open-source development environment running on a Human Support Robot simulator. The large language model powered task planner selects appropriate primitive skills to perform the task requested by users. The team aims to design a home service robot that can assist humans in their homes and continuously attends competitions to evaluate and improve the developed system.
ManifoldNeRF: View-dependent Image Feature Supervision for Few-shot Neural Radiance Fields
Oct 20, 2023



Novel view synthesis has recently made significant progress with the advent of Neural Radiance Fields (NeRF). DietNeRF is an extension of NeRF that aims to achieve this task from only a few images by introducing a new loss function for unknown viewpoints with no input images. The loss function assumes that a pre-trained feature extractor should output the same feature even if input images are captured at different viewpoints since the images contain the same object. However, while that assumption is ideal, in reality, it is known that as viewpoints continuously change, also feature vectors continuously change. Thus, the assumption can harm training. To avoid this harmful training, we propose ManifoldNeRF, a method for supervising feature vectors at unknown viewpoints using interpolated features from neighboring known viewpoints. Since the method provides appropriate supervision for each unknown viewpoint by the interpolated features, the volume representation is learned better than DietNeRF. Experimental results show that the proposed method performs better than others in a complex scene. We also experimented with several subsets of viewpoints from a set of viewpoints and identified an effective set of viewpoints for real environments. This provided a basic policy of viewpoint patterns for real-world application. The code is available at https://github.com/haganelego/ManifoldNeRF_BMVC2023
Hibikino-Musashi@Home 2023 Team Description Paper
Oct 19, 2023This paper describes an overview of the techniques of Hibikino-Musashi@Home, which intends to participate in the domestic standard platform league. The team has developed a dataset generator for the training of a robot vision system and an open-source development environment running on a human support robot simulator. The robot system comprises self-developed libraries including those for motion synthesis and open-source software works on the robot operating system. The team aims to realize a home service robot that assists humans in a home, and continuously attend the competition to evaluate the developed system. The brain-inspired artificial intelligence system is also proposed for service robots which are expected to work in a real home environment.
Hibikino-Musashi@Home 2022 Team Description Paper
Nov 12, 2022



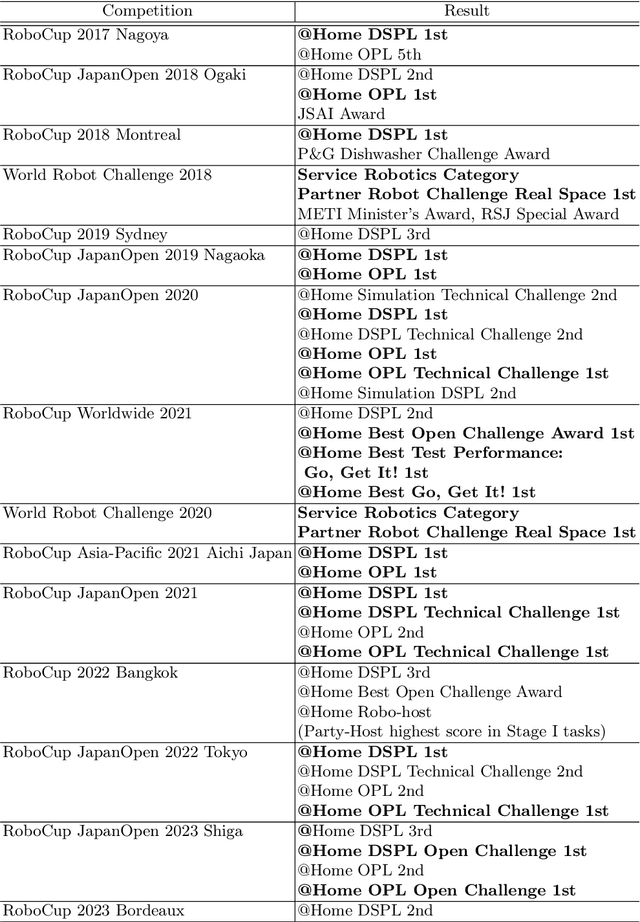
Our team, Hibikino-Musashi@Home (HMA), was founded in 2010. It is based in Japan in the Kitakyushu Science and Research Park. Since 2010, we have annually participated in the RoboCup@Home Japan Open competition in the open platform league (OPL).We participated as an open platform league team in the 2017 Nagoya RoboCup competition and as a domestic standard platform league (DSPL) team in the 2017 Nagoya, 2018 Montreal, 2019 Sydney, and 2021 Worldwide RoboCup competitions.We also participated in theWorld Robot Challenge (WRC) 2018 in the service-robotics category of the partner-robot challenge (real space) and won first place. Currently, we have 27 members from nine different laboratories within the Kyushu Institute of Technology and the university of Kitakyushu. In this paper, we introduce the activities that have been performed by our team and the technologies that we use.
Hibikino-Musashi@Home 2020 Team Description Paper
May 29, 2020
Our team, Hibikino-Musashi@Home (HMA), was founded in 2010. It is based in Japan in the Kitakyushu Science and Research Park. Since 2010, we have annually participated in the RoboCup@Home Japan Open competition in the open platform league (OPL). We participated as an open platform league team in the 2017 Nagoya RoboCup competition and as a domestic standard platform league (DSPL) team in the 2017 Nagoya, 2018 Montreal, and 2019 Sydney RoboCup competitions. We also participated in the World Robot Challenge (WRC) 2018 in the service-robotics category of the partner-robot challenge (real space) and won first place. Currently, we have 20 members from eight different laboratories within the Kyushu Institute of Technology. In this paper, we introduce the activities that have been performed by our team and the technologies that we use.