 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-order Knowledge Based Network Controllability Robustness Prediction: A Hypergraph Neural Network Approach
Feb 28, 2026In order to evaluate the invulnerability of networks against various types of attacks and provide guidance for potential performance enhancement as well as controllability maintenance, network controllability robustness (NCR) has attracted increasing attention in recent years. Traditionally, controllability robustness is determined by attack simulations, which are computationally time-consuming and only applicable to small-scale networks. Although some machine learning-based methods for predicting network controllability robustness have been proposed, they mainly focus on pairwise interactions in complex networks, and the underlying relationships between high-order structural information and controllability robustness have not been explored. In this paper, a dual hypergraph attention neural network model based on high-order knowledge (NCR-HoK) is proposed to accomplish robustness learning and controllability robustness curve prediction. Through a node feature encoder, hypergraph construction with high-order relations, and a dedicated dual hypergraph attention module, the proposed method can effectively learn three types of network information simultaneously: explicit structural information in the original graph, high-order connection information in local neighborhoods, and hidden features in the embedding space. Notably, we explore for the first time the impact of high-order knowledge on network controllability robustness. Compared with state-of-the-art methods for network robustness learning, the proposed method achieves superior performance on both synthetic and real-world networks with low computational overhead.
AutoSGNN: Automatic Propagation Mechanism Discovery for Spectral Graph Neural Networks
Dec 17, 2024



In real-world applications, spectral Graph Neural Networks (GNNs) are powerful tools for processing diverse types of graphs. However, a single GNN often struggles to handle different graph types-such as homogeneous and heterogeneous graphs-simultaneously. This challenge has led to the manual design of GNNs tailored to specific graph types, but these approaches are limited by the high cost of labor and the constraints of expert knowledge, which cannot keep up with the rapid growth of graph data. To overcome these challenges, we propose AutoSGNN, an automated framework for discovering propagation mechanisms in spectral GNNs. AutoSGNN unifies the search space for spectral GNNs by integrating large language models with evolutionary strategies to automatically generate architectures that adapt to various graph types. Extensive experiments on nine widely-used datasets, encompassing both homophilic and heterophilic graphs, demonstrate that AutoSGNN outperforms state-of-the-art spectral GNNs and graph neural architecture search methods in both performance and efficiency.
Exploring Knowledge Transfer in Evolutionary Many-task Optimization: A Complex Network Perspective
Jul 12, 2024



The field of evolutionary many-task optimization (EMaTO) is increasingly recognized for its ability to streamline the resolution of optimization challenges with repetitive characteristics, thereby conserving computational resources. This paper tackles the challenge of crafting efficient knowledge transfer mechanisms within EMaTO, a task complicated by the computational demands of individual task evaluations. We introduce a novel framework that employs a complex network to comprehensively analyze the dynamics of knowledge transfer between tasks within EMaTO. By extracting and scrutinizing the knowledge transfer network from existing EMaTO algorithms, we evaluate the influence of network modifications on overall algorithmic efficacy. Our findings indicate that these networks are diverse, displaying community-structured directed graph characteristics, with their network density adapting to different task sets. This research underscores the viability of integrating complex network concepts into EMaTO to refine knowledge transfer processes, paving the way for future advancements in the domain.
An Efficient Generation Method based on Dynamic Curvature of the Reference Curve for Robust Trajectory Planning
Dec 29, 2020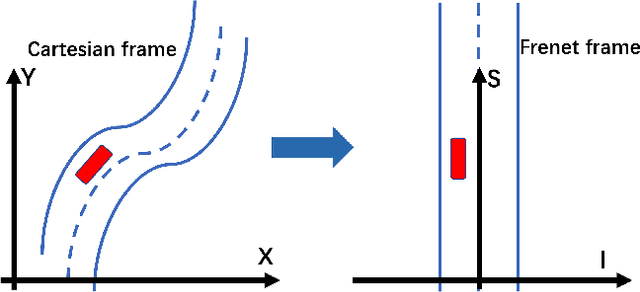
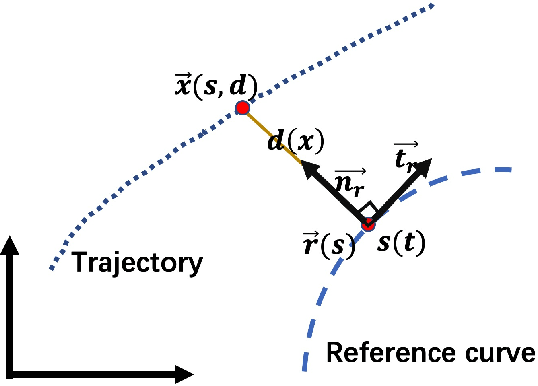
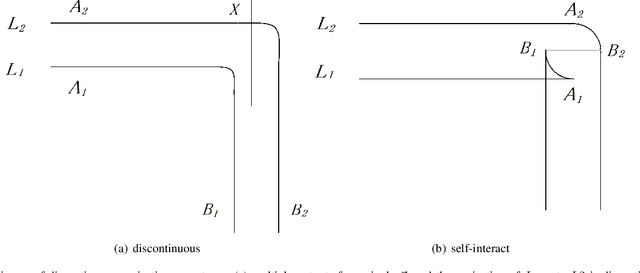
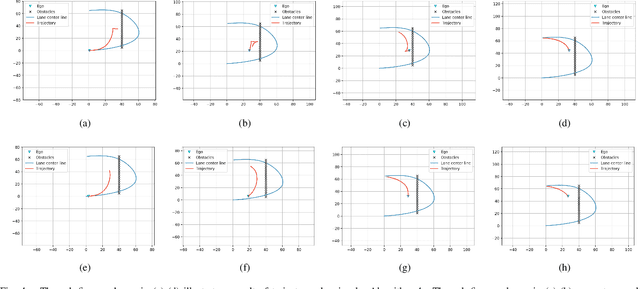
Trajectory planning is a fundamental task on various autonomous driving platforms, such as social robotics and self-driving cars. Many trajectory planning algorithms use a reference curve based Frenet frame with time to reduce the planning dimension. However, there is a common implicit assumption in classic trajectory planning approaches, which is that the generated trajectory should follow the reference curve continuously. This assumption is not always true in real applications and it might cause some undesired issues in planning. One issue is that the projection of the planned trajectory onto the reference curve maybe discontinuous. Then, some segments on the reference curve are not the image of any part of the planned path. Another issue is that the planned path might self-intersect when following a simple reference curve continuously. The generated trajectories are unnatural and suboptimal ones when these issues happen. In this paper, we firstly demonstrate these issues and then introduce an efficient trajectory generation method which uses a new transformation from the Cartesian frame to Frenet frames. Experimental results on a simulated street scenario demonstrated the effectiveness of the proposed method.