 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Efficient Generation Method based on Dynamic Curvature of the Reference Curve for Robust Trajectory Planning
Paper and Code
Dec 29, 2020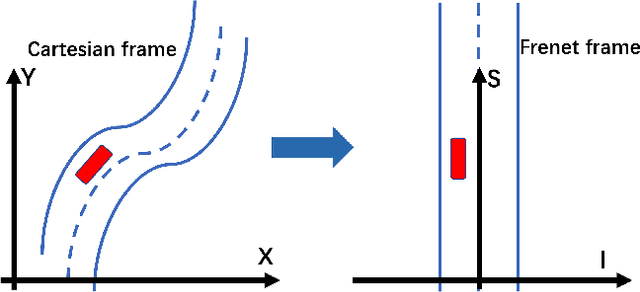
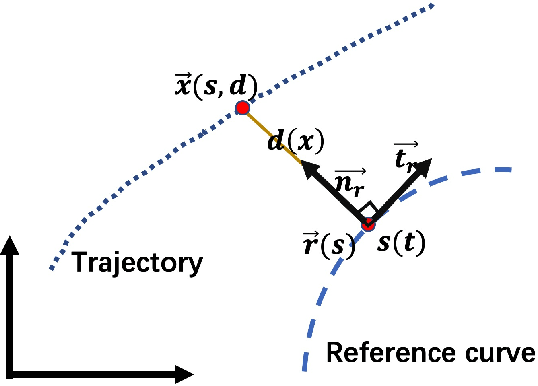
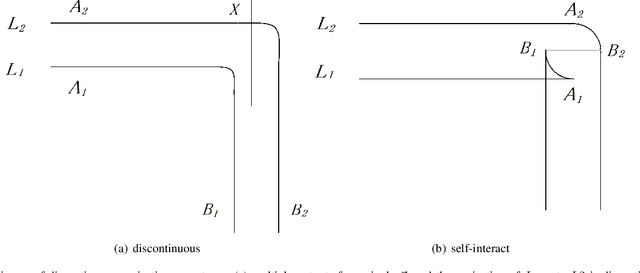
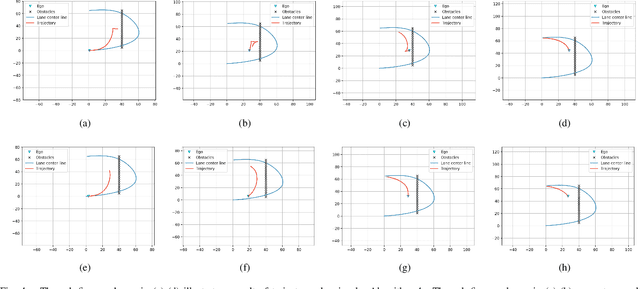
Trajectory planning is a fundamental task on various autonomous driving platforms, such as social robotics and self-driving cars. Many trajectory planning algorithms use a reference curve based Frenet frame with time to reduce the planning dimension. However, there is a common implicit assumption in classic trajectory planning approaches, which is that the generated trajectory should follow the reference curve continuously. This assumption is not always true in real applications and it might cause some undesired issues in planning. One issue is that the projection of the planned trajectory onto the reference curve maybe discontinuous. Then, some segments on the reference curve are not the image of any part of the planned path. Another issue is that the planned path might self-intersect when following a simple reference curve continuously. The generated trajectories are unnatural and suboptimal ones when these issues happen. In this paper, we firstly demonstrate these issues and then introduce an efficient trajectory generation method which uses a new transformation from the Cartesian frame to Frenet frames. Experimental results on a simulated street scenario demonstrated the effectiveness of the proposed method.