 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZodiAq: An Isotropic Flagella-Inspired Soft Underwater Drone for Safe Marine Exploration
Mar 25, 2025

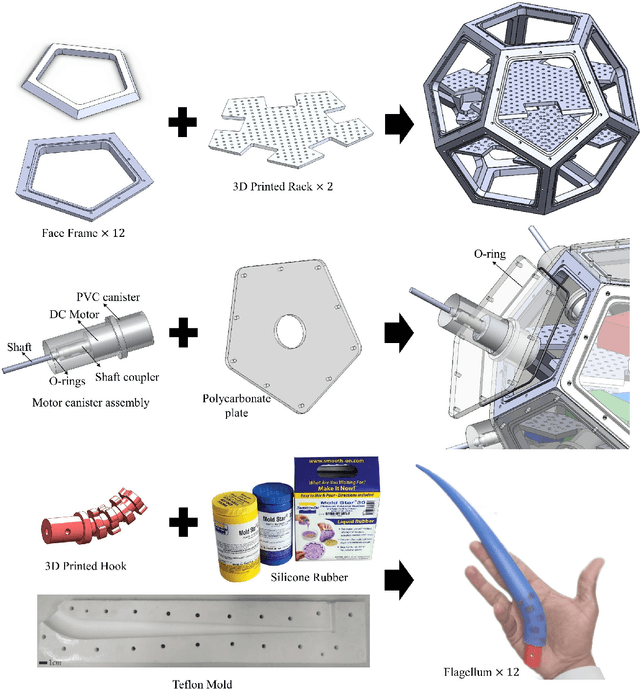

The inherent challenges of robotic underwater exploration, such as hydrodynamic effects, the complexity of dynamic coupling, and the necessity for sensitive interaction with marine life, call for the adoption of soft robotic approaches in marine exploration. To address this, we present a novel prototype, ZodiAq, a soft underwater drone inspired by prokaryotic bacterial flagella. ZodiAq's unique dodecahedral structure, equipped with 12 flagella-like arms, ensures design redundancy and compliance, ideal for navigating complex underwater terrains. The prototype features a central unit based on a Raspberry Pi, connected to a sensory system for inertial, depth, and vision detection, and an acoustic modem for communication. Combined with the implemented control law, it renders ZodiAq an intelligent system. This paper details the design and fabrication process of ZodiAq, highlighting design choices and prototype capabilities. Based on the strain-based modeling of Cosserat rods, we have developed a digital twin of the prototype within a simulation toolbox to ease analysis and control. To optimize its operation in dynamic aquatic conditions, a simplified model-based controller has been developed and implemented, facilitating intelligent and adaptive movement in the hydrodynamic environment. Extensive experimental demonstrations highlight the drone's potential, showcasing its design redundancy, embodied intelligence, crawling gait, and practical applications in diverse underwater settings. This research contributes significantly to the field of underwater soft robotics, offering a promising new avenue for safe, efficient, and environmentally conscious underwater exploration.
SoRoSim: a MATLAB Toolbox for Soft Robotics Based on the Geometric Variable-strain Approach
Jul 12, 2021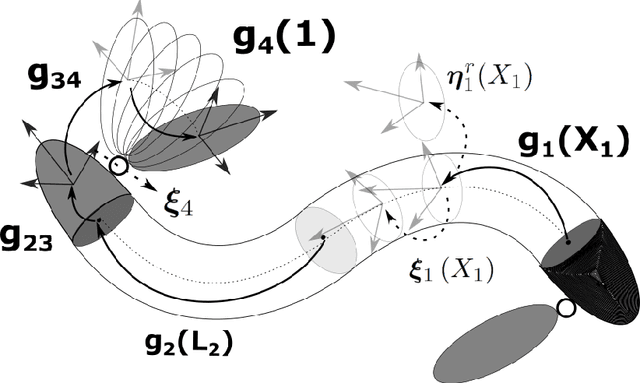



Soft robotics has been a trending topic within the robotics community for almost two decades. However, the available tools for the community to model and analyze soft robotics artifacts are still limited. This paper presents the development of a user-friendly MATLAB toolbox, SoRoSim, that integrates the Geometric Variable Strain model to facilitate the modeling, analysis, and simulation of hybrid rigid-soft open-chain robotic systems. The toolbox implements a recursive, two-level nested quadrature scheme to solve the model. We demonstrate several examples and applications to validate the toolbox and explore the toolbox's capabilities to efficiently model a vast range of robotic systems, considering different actuators and external loads, including the fluid-structure interactions. We think that the soft-robotics research community will benefit from the SoRoSim toolbox for a wide variety of applications.