 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive morphing of wing and tail for stable, resilient, and energy-efficient flight of avian-informed drones
Mar 13, 2024



Avian-informed drones feature morphing wing and tail surfaces, enhancing agility and adaptability in flight. Despite their large potential, realising their full capabilities remains challenging due to the lack of generalized control strategies accommodating their large degrees of freedom and cross-coupling effects between their control surfaces. Here we propose a new body-rate controller for avian-informed drones that uses all available actuators to control the motion of the drone. The method exhibits robustness against physical perturbations, turbulent airflow, and even loss of certain actuators mid-flight. Furthermore, wing and tail morphing is leveraged to enhance energy efficiency at 8m/s, 10m/s and 12m/s using in-flight Bayesian optimization. The resulting morphing configurations yield significant gains across all three speeds of up to 11.5% compared to non-morphing configurations and display a strong resemblance to avian flight at different speeds. This research lays the groundwork for the development of autonomous avian-informed drones that operate under diverse wind conditions, emphasizing the role of morphing in improving energy efficiency.
Co-Design Optimisation of Morphing Topology and Control of Winged Drones
Sep 25, 2023
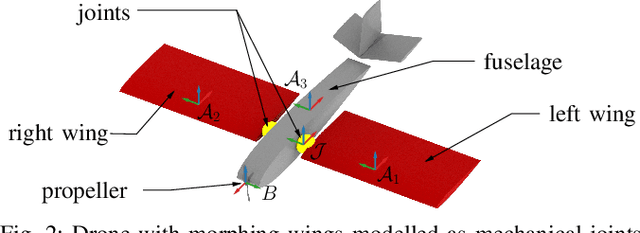


The design and control of winged aircraft and drones is an iterative process aimed at identifying a compromise of mission-specific costs and constraints. When agility is required, shape-shifting (morphing) drones represent an efficient solution. However, morphing drones require the addition of actuated joints that increase the topology and control coupling, making the design process more complex. We propose a co-design optimisation method that assists the engineers by proposing a morphing drone's conceptual design that includes topology, actuation, morphing strategy, and controller parameters. The method consists of applying multi-objective constraint-based optimisation to a multi-body winged drone with trajectory optimisation to solve the motion intelligence problem under diverse flight mission requirements. We show that co-designed morphing drones outperform fixed-winged drones in terms of energy efficiency and agility, suggesting that the proposed co-design method could be a useful addition to the aircraft engineering toolbox.
Training Efficient Controllers via Analytic Policy Gradient
Sep 26, 2022
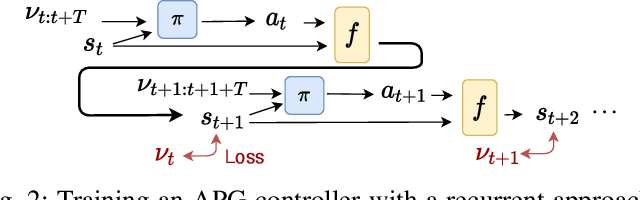
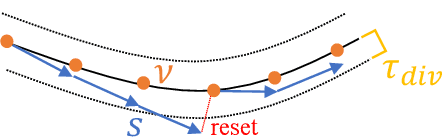
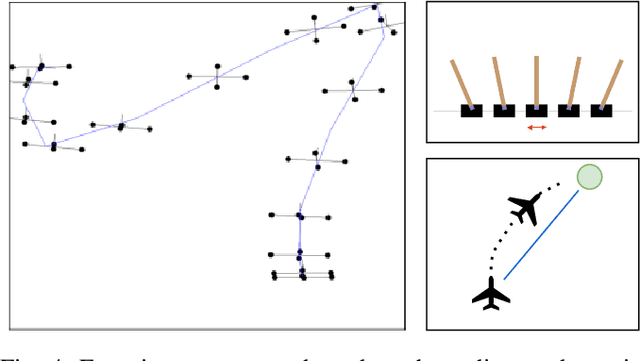
Control design for robotic systems is complex and often requires solving an optimization to follow a trajectory accurately. Online optimization approaches like Model Predictive Control (MPC) have been shown to achieve great tracking performance, but require high computing power. Conversely, learning-based offline optimization approaches, such as Reinforcement Learning (RL), allow fast and efficient execution on the robot but hardly match the accuracy of MPC in trajectory tracking tasks. In systems with limited compute, such as aerial vehicles, an accurate controller that is efficient at execution time is imperative. We propose an Analytic Policy Gradient (APG) method to tackle this problem. APG exploits the availability of differentiable simulators by training a controller offline with gradient descent on the tracking error. We address training instabilities that frequently occur with APG through curriculum learning and experiment on a widely used controls benchmark, the CartPole, and two common aerial robots, a quadrotor and a fixed-wing drone. Our proposed method outperforms both model-based and model-free RL methods in terms of tracking error. Concurrently, it achieves similar performance to MPC while requiring more than an order of magnitude less computation time. Our work provides insights into the potential of APG as a promising control method for robotics. To facilitate the exploration of APG, we open-source our code and make it available at https://github.com/lis-epfl/apg_trajectory_tracking.
VIODE: A Simulated Dataset to Address the Challenges of Visual-Inertial Odometry in Dynamic Environments
Feb 11, 2021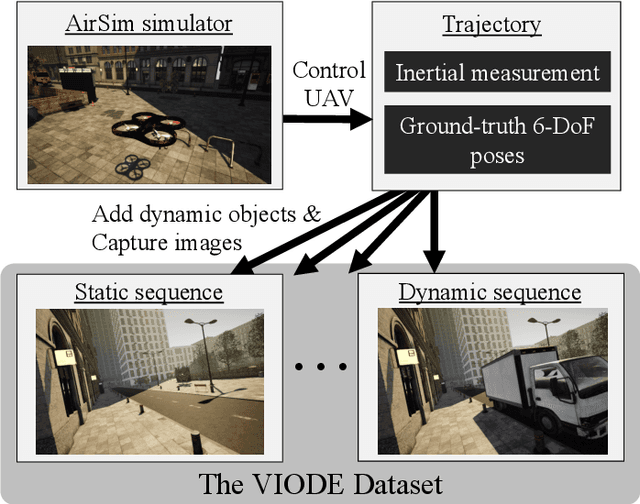

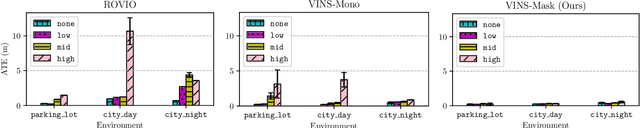
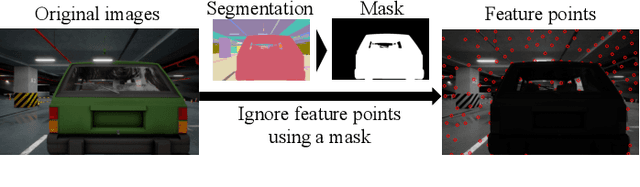
Dynamic environments such as urban areas are still challenging for popular visual-inertial odometry (VIO) algorithms. Existing datasets typically fail to capture the dynamic nature of these environments, therefore making it difficult to quantitatively evaluate the robustness of existing VIO methods. To address this issue, we propose three contributions: firstly, we provide the VIODE benchmark, a novel dataset recorded from a simulated UAV that navigates in challenging dynamic environments. The unique feature of the VIODE dataset is the systematic introduction of moving objects into the scenes. It includes three environments, each of which is available in four dynamic levels that progressively add moving objects. The dataset contains synchronized stereo images and IMU data, as well as ground-truth trajectories and instance segmentation masks. Secondly, we compare state-of-the-art VIO algorithms on the VIODE dataset and show that they display substantial performance degradation in highly dynamic scenes. Thirdly, we propose a simple extension for visual localization algorithms that relies on semantic information. Our results show that scene semantics are an effective way to mitigate the adverse effects of dynamic objects on VIO algorithms. Finally, we make the VIODE dataset publicly available at https://github.com/kminoda/VIODE.