 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniVer: A Unified Perspective for Multi-step and Multi-draft Speculative Decoding
May 06, 2026Speculative decoding accelerates Large Language Models via draft-then-verify, where verification can be framed as an Optimal Transport (OT) problem. Existing approaches typically handle multi-draft and multi-step aspects in isolation, applying either flat OT to single-step drafts or per-token rejection sampling to tree-structured candidates. This separation leaves the joint regime (where multi-step dependencies meet multi-draft branching) poorly optimized, as local verification rules fail to exploit the coupling between horizontal and vertical dimensions of candidate trees. In this paper, we propose a unified perspective that casts tree-based verification as a conditional OT problem. Our key insight is that vertical dependencies can be abstracted through prefix acceptance probabilities, which act as dynamic scaling factors to actively guide horizontal draft selection. Based on this principle, we introduce UniVer, a verification algorithm that jointly optimizes across tree levels by composing local optimal transport plans under prefix constraints. We prove that UniVer remains lossless and achieves the optimal acceptance rate under the proposed conditional framework. Extensive experiments across different tasks and models demonstrate that UniVer improves acceptance length by 4.2% to 8.5% over standard recursive rejection sampling without replacement, while maintaining exact distributional alignment with the target model.
Estimating Central, Peripheral, and Temporal Visual Contributions to Human Decision Making in Atari Games
Apr 06, 2026We study how different visual information sources contribute to human decision making in dynamic visual environments. Using Atari-HEAD, a large-scale Atari gameplay dataset with synchronized eye-tracking, we introduce a controlled ablation framework as a means to reverse-engineer the contribution of peripheral visual information, explicit gaze information in form of gaze maps, and past-state information from human behavior. We train action-prediction networks under six settings that selectively include or exclude these information sources. Across 20 games, peripheral information shows by far the strongest contribution, with median prediction-accuracy drops in the range of 35.27-43.90% when removed. Gaze information yields smaller drops of 2.11-2.76%, while past-state information shows a broader range of 1.52-15.51%, with the upper end likely more informative due to reduced peripheral-information leakage. To complement aggregate accuracies, we cluster states by true-action probabilities assigned by the different model configurations. This analysis identifies coarse behavioral regimes, including focus-dominated, periphery-dominated, and more contextual decision situations. These results suggest that human decision making in Atari depends strongly on information beyond the current focus of gaze, while the proposed framework provides a way to estimate such information-source contributions from behavior.
Accurate Open-Loop Control of a Soft Continuum Robot Through Visually Learned Latent Representations
Mar 20, 2026This work addresses open-loop control of a soft continuum robot (SCR) from video-learned latent dynamics. Visual Oscillator Networks (VONs) from previous work are used, that provide mechanistically interpretable 2D oscillator latents through an attention broadcast decoder (ABCD). Open-loop, single-shooting optimal control is performed in latent space to track image-specified waypoints without camera feedback. An interactive SCR live simulator enables design of static, dynamic, and extrapolated targets and maps them to model-specific latent waypoints. On a two-segment pneumatic SCR, Koopman, MLP, and oscillator dynamics, each with and without ABCD, are evaluated on setpoint and dynamic trajectories. ABCD-based models consistently reduce image-space tracking error. The VON and ABCD-based Koopman models attains the lowest MSEs. Using an ablation study, we demonstrate that several architecture choices and training settings contribute to the open-loop control performance. Simulation stress tests further confirm static holding, stable extrapolated equilibria, and plausible relaxation to the rest state. To the best of our knowledge, this is the first demonstration that interpretable, video-learned latent dynamics enable reliable long-horizon open-loop control of an SCR.
A Temporal Difference Method for Stochastic Continuous Dynamics
May 21, 2025For continuous systems modeled by dynamical equations such as ODEs and SDEs, Bellman's principle of optimality takes the form of the Hamilton-Jacobi-Bellman (HJB) equation, which provides the theoretical target of reinforcement learning (RL). Although recent advances in RL successfully leverage this formulation, the existing methods typically assume the underlying dynamics are known a priori because they need explicit access to the coefficient functions of dynamical equations to update the value function following the HJB equation. We address this inherent limitation of HJB-based RL; we propose a model-free approach still targeting the HJB equation and propose the corresponding temporal difference method. We demonstrate its potential advantages over transition kernel-based formulations, both qualitatively and empirically. The proposed formulation paves the way toward bridging stochastic optimal control and model-free reinforcement learning.
Revealing Covert Attention by Analyzing Human and Reinforcement Learning Agent Gameplay
Apr 15, 2025
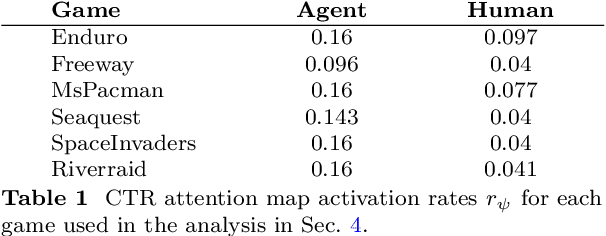


This study introduces a novel method for revealing human covert attention patterns using gameplay data alone, utilizing offline attention techniques from reinforcement learning (RL). We propose the contextualized, task-relevant (CTR) attention network, which generates attention maps from both human and RL agent gameplay in Atari environments. These maps are sparse yet retain the necessary information for the current player's decision making. We compare the CTR-derived attention maps with a temporally integrated overt attention (TIOA) model based on eye-tracking data, serving as a point of comparison and discussion. Visual inspection reveals distinct attention patterns: human CTR maps focus on the player and rather nearby opponents, occasionally shifting between stronger focus and broader views - sometimes even attending to empty space ahead. In contrast, agent maps maintain a consistent broad focus on most objects, including distant ones and the player. Quantitative analysis further demonstrates that human CTR maps align more closely with TIOA than agent maps do. Our findings indicate that the CTR attention network can effectively reveal human covert attention patterns from gameplay alone, without the need for additional data like brain activity recordings. This work contributes to understanding human-agent attention differences and enables the development of RL agents augmented with human covert attention.
VIODE: A Simulated Dataset to Address the Challenges of Visual-Inertial Odometry in Dynamic Environments
Feb 11, 2021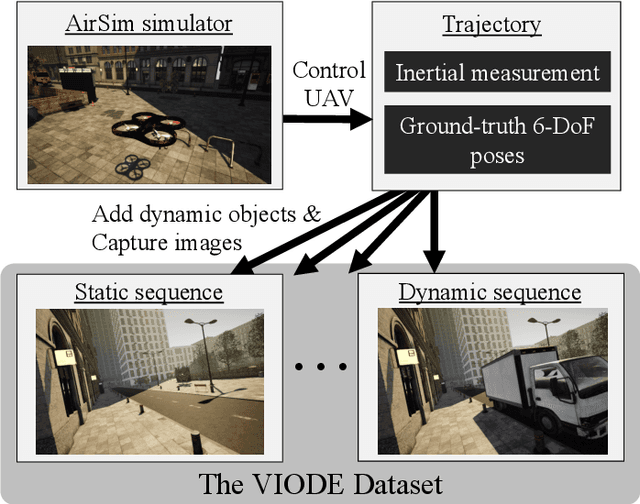

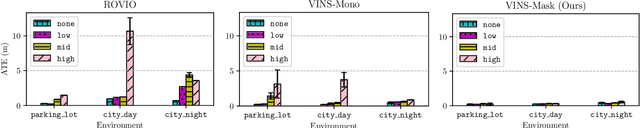
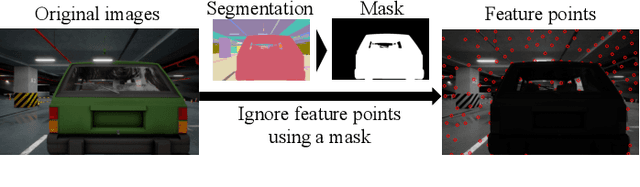
Dynamic environments such as urban areas are still challenging for popular visual-inertial odometry (VIO) algorithms. Existing datasets typically fail to capture the dynamic nature of these environments, therefore making it difficult to quantitatively evaluate the robustness of existing VIO methods. To address this issue, we propose three contributions: firstly, we provide the VIODE benchmark, a novel dataset recorded from a simulated UAV that navigates in challenging dynamic environments. The unique feature of the VIODE dataset is the systematic introduction of moving objects into the scenes. It includes three environments, each of which is available in four dynamic levels that progressively add moving objects. The dataset contains synchronized stereo images and IMU data, as well as ground-truth trajectories and instance segmentation masks. Secondly, we compare state-of-the-art VIO algorithms on the VIODE dataset and show that they display substantial performance degradation in highly dynamic scenes. Thirdly, we propose a simple extension for visual localization algorithms that relies on semantic information. Our results show that scene semantics are an effective way to mitigate the adverse effects of dynamic objects on VIO algorithms. Finally, we make the VIODE dataset publicly available at https://github.com/kminoda/VIODE.
Companion Unmanned Aerial Vehicles: A Survey
Jan 14, 2020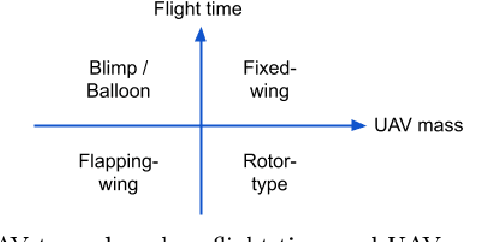

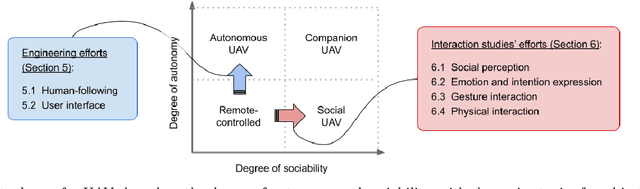
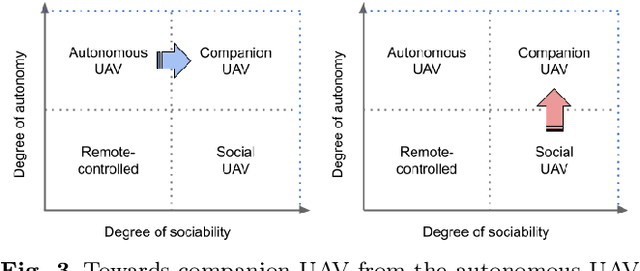
Recent technological advancements in small-scale unmanned aerial vehicles (UAVs) have led to the development of companion UAVs. Similar to conventional companion robots, companion UAVs have the potential to assist us in our daily lives and to help alleviating social loneliness issue. In contrast to ground companion robots, companion UAVs have the capability to fly and possess unique interaction characteristics. Our goals in this work are to have a bird's-eye view of the companion UAV works and to identify lessons learned and guidelines for the design of companion UAVs. We tackle two major challenges towards these goals, where we first use a coordinated way to gather top-quality human-drone interaction (HDI) papers from three sources, and then propose to use a perceptual map of UAVs to summarize current research efforts in HDI. While being simple, the proposed perceptual map can cover the efforts have been made to realize companion UAVs in a comprehensive manner and lead our discussion coherently. We also discuss patterns we noticed in the literature and some lessons learned throughout the review. In addition, we recommend several areas that are worth exploring and suggest a few guidelines to enhance HDI researches with companion UAVs.
Dynamic and Static Topic Model for Analyzing Time-Series Document Collections
May 06, 2018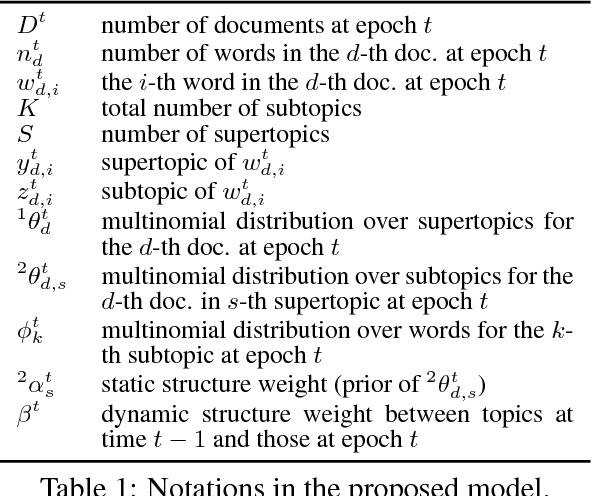
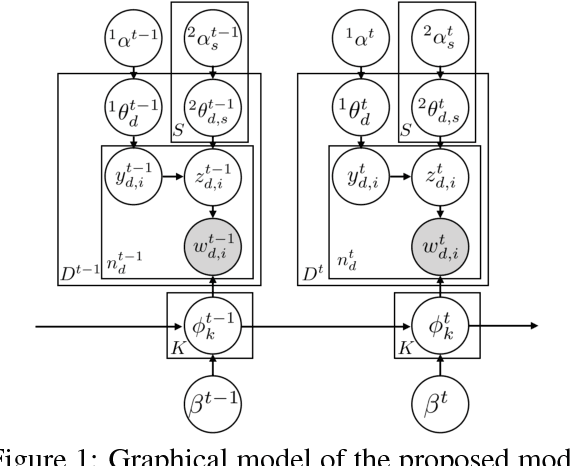
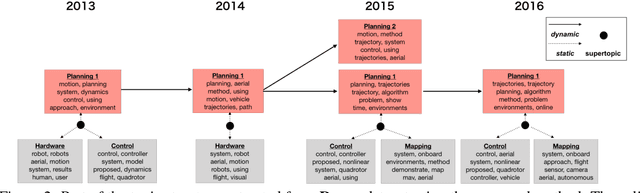
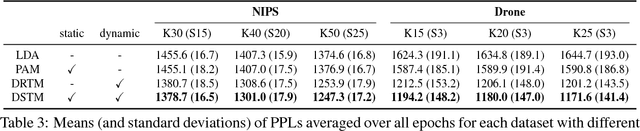
For extracting meaningful topics from texts, their structures should be considered properly. In this paper, we aim to analyze structured time-series documents such as a collection of news articles and a series of scientific papers, wherein topics evolve along time depending on multiple topics in the past and are also related to each other at each time. To this end, we propose a dynamic and static topic model, which simultaneously considers the dynamic structures of the temporal topic evolution and the static structures of the topic hierarchy at each time. We show the results of experiments on collections of scientific papers, in which the proposed method outperformed conventional models. Moreover, we show an example of extracted topic structures, which we found helpful for analyzing research activities.
Learning Koopman Invariant Subspaces for Dynamic Mode Decomposition
Jan 30, 2018
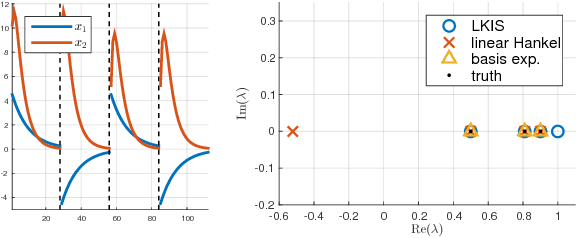
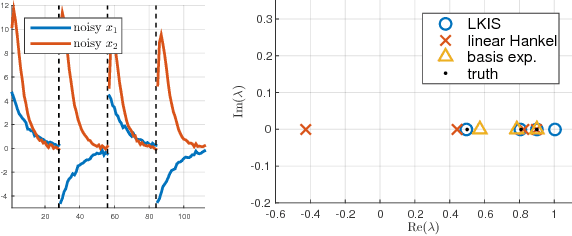

Spectral decomposition of the Koopman operator is attracting attention as a tool for the analysis of nonlinear dynamical systems. Dynamic mode decomposition is a popular numerical algorithm for Koopman spectral analysis; however, we often need to prepare nonlinear observables manually according to the underlying dynamics, which is not always possible since we may not have any a priori knowledge about them. In this paper, we propose a fully data-driven method for Koopman spectral analysis based on the principle of learning Koopman invariant subspaces from observed data. To this end, we propose minimization of the residual sum of squares of linear least-squares regression to estimate a set of functions that transforms data into a form in which the linear regression fits well. We introduce an implementation with neural networks and evaluate performance empirically using nonlinear dynamical systems and applications.
Recent Developments in Aerial Robotics: A Survey and Prototypes Overview
Nov 30, 2017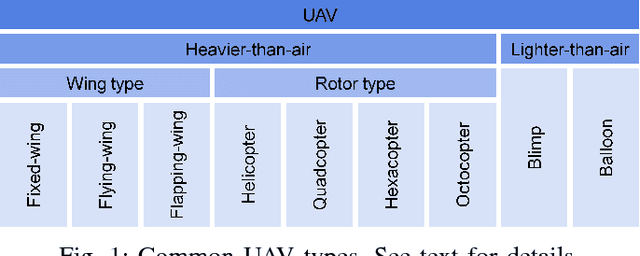



In recent years, research and development in aerial robotics (i.e., unmanned aerial vehicles, UAVs) has been growing at an unprecedented speed, and there is a need to summarize the background, latest developments, and trends of UAV research. Along with a general overview on the definition, types, categories, and topics of UAV, this work describes a systematic way to identify 1,318 high-quality UAV papers from more than thirty thousand that have been appeared in the top journals and conferences. On top of that, we provide a bird's-eye view of UAV research since 2001 by summarizing various statistical information, such as the year, type, and topic distribution of the UAV papers. We make our survey list public and believe that the list can not only help researchers identify, study, and compare their work, but is also useful for understanding research trends in the field. From our survey results, we find there are many types of UAV, and to the best of our knowledge, no literature has attempted to summarize all types in one place. With our survey list, we explain the types within our survey and outline the recent progress of each. We believe this summary can enhance readers' understanding on the UAVs and inspire researchers to propose new methods and new applications.