 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy-based Regularization for Learning Residual Dynamics in Neural MPC for Omnidirectional Aerial Robots
Apr 16, 2026Data-driven Model Predictive Control (MPC) has lately been the core research subject in the field of control theory. The combination of an optimal control framework with deep learning paradigms opens up the possibility to accurately track control tasks without the need for complex analytical models. However, the system dynamics are often nuanced and the neural model lacks the potential to understand physical properties such as inertia and conservation of energy. In this work, we propose a novel energy-based regularization loss function which is applied to the training of a neural model that learns the residual dynamics of an omnidirectional aerial robot. Our energy-based regularization encourages the neural network to cause control corrections that stabilize the energy of the system. The residual dynamics are integrated into the MPC framework and improve the positional mean absolute error (MAE) over three real-world experiments by 23% compared to an analytical MPC. We also compare our method to a standard neural MPC implementation without regularization and primarily achieve a significantly increased flight stability implicitly due to the energy regularization and up to 15% lower MAE. Our code is available under: https://github.com/johanneskbl/jsk_aerial_robot/tree/develop/neural_MPC.
Estimating Central, Peripheral, and Temporal Visual Contributions to Human Decision Making in Atari Games
Apr 06, 2026We study how different visual information sources contribute to human decision making in dynamic visual environments. Using Atari-HEAD, a large-scale Atari gameplay dataset with synchronized eye-tracking, we introduce a controlled ablation framework as a means to reverse-engineer the contribution of peripheral visual information, explicit gaze information in form of gaze maps, and past-state information from human behavior. We train action-prediction networks under six settings that selectively include or exclude these information sources. Across 20 games, peripheral information shows by far the strongest contribution, with median prediction-accuracy drops in the range of 35.27-43.90% when removed. Gaze information yields smaller drops of 2.11-2.76%, while past-state information shows a broader range of 1.52-15.51%, with the upper end likely more informative due to reduced peripheral-information leakage. To complement aggregate accuracies, we cluster states by true-action probabilities assigned by the different model configurations. This analysis identifies coarse behavioral regimes, including focus-dominated, periphery-dominated, and more contextual decision situations. These results suggest that human decision making in Atari depends strongly on information beyond the current focus of gaze, while the proposed framework provides a way to estimate such information-source contributions from behavior.
Accurate Open-Loop Control of a Soft Continuum Robot Through Visually Learned Latent Representations
Mar 20, 2026This work addresses open-loop control of a soft continuum robot (SCR) from video-learned latent dynamics. Visual Oscillator Networks (VONs) from previous work are used, that provide mechanistically interpretable 2D oscillator latents through an attention broadcast decoder (ABCD). Open-loop, single-shooting optimal control is performed in latent space to track image-specified waypoints without camera feedback. An interactive SCR live simulator enables design of static, dynamic, and extrapolated targets and maps them to model-specific latent waypoints. On a two-segment pneumatic SCR, Koopman, MLP, and oscillator dynamics, each with and without ABCD, are evaluated on setpoint and dynamic trajectories. ABCD-based models consistently reduce image-space tracking error. The VON and ABCD-based Koopman models attains the lowest MSEs. Using an ablation study, we demonstrate that several architecture choices and training settings contribute to the open-loop control performance. Simulation stress tests further confirm static holding, stable extrapolated equilibria, and plausible relaxation to the rest state. To the best of our knowledge, this is the first demonstration that interpretable, video-learned latent dynamics enable reliable long-horizon open-loop control of an SCR.
Adaptive Model-Predictive Control of a Soft Continuum Robot Using a Physics-Informed Neural Network Based on Cosserat Rod Theory
Aug 18, 2025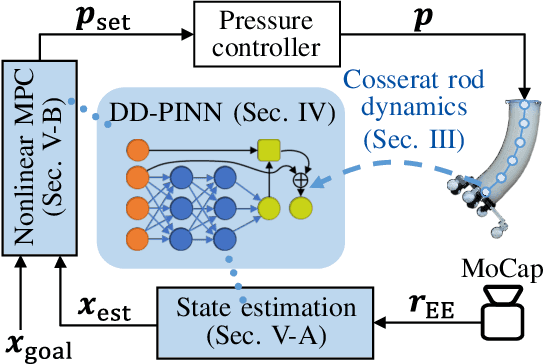
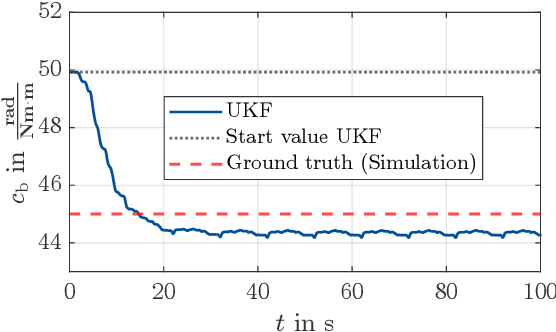
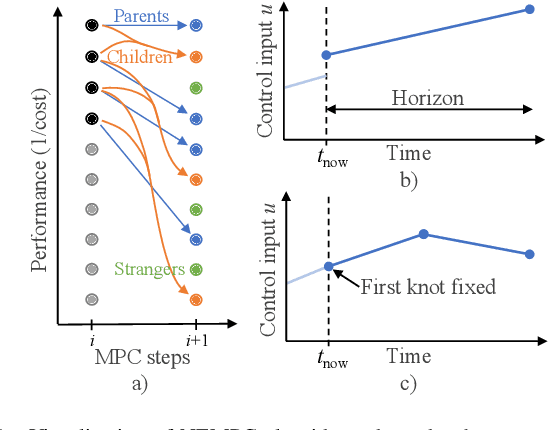
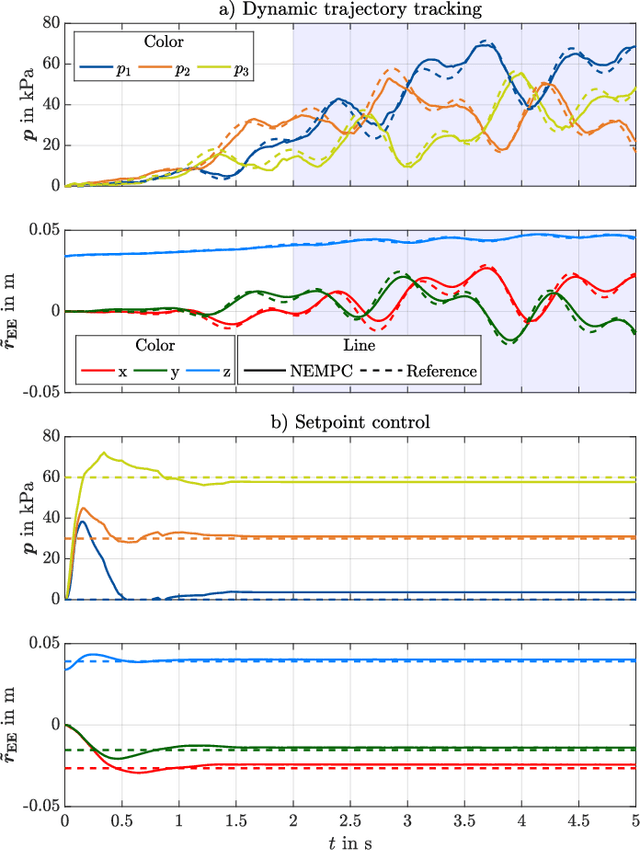
Dynamic control of soft continuum robots (SCRs) holds great potential for expanding their applications, but remains a challenging problem due to the high computational demands of accurate dynamic models. While data-driven approaches like Koopman-operator-based methods have been proposed, they typically lack adaptability and cannot capture the full robot shape, limiting their applicability. This work introduces a real-time-capable nonlinear model-predictive control (MPC) framework for SCRs based on a domain-decoupled physics-informed neural network (DD-PINN) with adaptable bending stiffness. The DD-PINN serves as a surrogate for the dynamic Cosserat rod model with a speed-up factor of 44000. It is also used within an unscented Kalman filter for estimating the model states and bending compliance from end-effector position measurements. We implement a nonlinear evolutionary MPC running at 70 Hz on the GPU. In simulation, it demonstrates accurate tracking of dynamic trajectories and setpoint control with end-effector position errors below 3 mm (2.3% of the actuator's length). In real-world experiments, the controller achieves similar accuracy and accelerations up to 3.55 m/s2.
Revealing Covert Attention by Analyzing Human and Reinforcement Learning Agent Gameplay
Apr 15, 2025
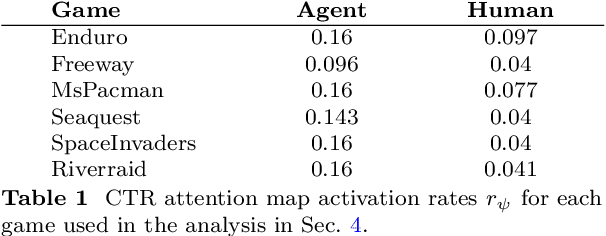


This study introduces a novel method for revealing human covert attention patterns using gameplay data alone, utilizing offline attention techniques from reinforcement learning (RL). We propose the contextualized, task-relevant (CTR) attention network, which generates attention maps from both human and RL agent gameplay in Atari environments. These maps are sparse yet retain the necessary information for the current player's decision making. We compare the CTR-derived attention maps with a temporally integrated overt attention (TIOA) model based on eye-tracking data, serving as a point of comparison and discussion. Visual inspection reveals distinct attention patterns: human CTR maps focus on the player and rather nearby opponents, occasionally shifting between stronger focus and broader views - sometimes even attending to empty space ahead. In contrast, agent maps maintain a consistent broad focus on most objects, including distant ones and the player. Quantitative analysis further demonstrates that human CTR maps align more closely with TIOA than agent maps do. Our findings indicate that the CTR attention network can effectively reveal human covert attention patterns from gameplay alone, without the need for additional data like brain activity recordings. This work contributes to understanding human-agent attention differences and enables the development of RL agents augmented with human covert attention.
Domain-decoupled Physics-informed Neural Networks with Closed-form Gradients for Fast Model Learning of Dynamical Systems
Aug 27, 2024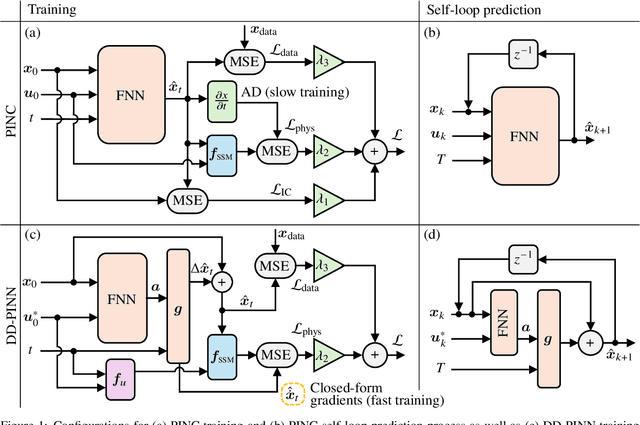
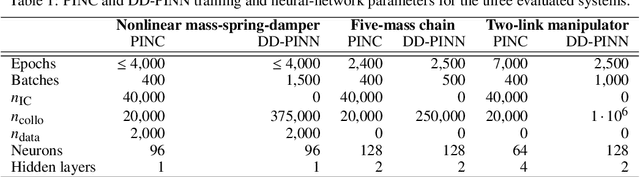
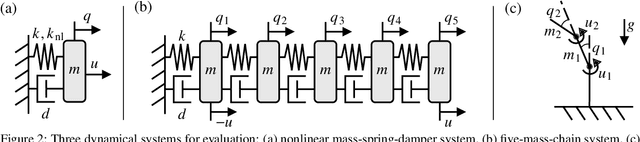

Physics-informed neural networks (PINNs) are trained using physical equations and can also incorporate unmodeled effects by learning from data. PINNs for control (PINCs) of dynamical systems are gaining interest due to their prediction speed compared to classical numerical integration methods for nonlinear state-space models, making them suitable for real-time control applications. We introduce the domain-decoupled physics-informed neural network (DD-PINN) to address current limitations of PINC in handling large and complex nonlinear dynamic systems. The time domain is decoupled from the feed-forward neural network to construct an Ansatz function, allowing for calculation of gradients in closed form. This approach significantly reduces training times, especially for large dynamical systems, compared to PINC, which relies on graph-based automatic differentiation. Additionally, the DD-PINN inherently fulfills the initial condition and supports higher-order excitation inputs, simplifying the training process and enabling improved prediction accuracy. Validation on three systems - a nonlinear mass-spring-damper, a five-mass-chain, and a two-link robot - demonstrates that the DD-PINN achieves significantly shorter training times. In cases where the PINC's prediction diverges, the DD-PINN's prediction remains stable and accurate due to higher physics loss reduction or use of a higher-order excitation input. The DD-PINN allows for fast and accurate learning of large dynamical systems previously out of reach for the PINC.
Enhanced Model-Free Dynamic State Estimation for a Soft Robot Finger Using an Embedded Optical Waveguide Sensor
Jun 06, 2024In this letter, an advanced stretchable optical waveguide sensor is implemented into a multidirectional PneuNet soft actuator to enhance dynamic state estimation through a NARX neural network. The stretchable waveguide featuring a semidivided core design from previous work is sensitive to multiple strain modes. It is integrated into a soft finger actuator with two pressure chambers that replicates human finger motions. The soft finger, designed for applications in soft robotic grippers or hands, is viewed in isolation under pneumatic actuation controlled by motorized linear stages. The research first characterizes the soft finger's workspace and sensor response. Subsequently, three dynamic state estimators are developed using NARX architecture, differing in the degree of incorporating the optical waveguide sensor response. Evaluation on a testing path reveals that the full sensor response significantly improves end effector position estimation, reducing mean error by 51\% from 5.70 mm to 2.80 mm, compared to only 21\% improvement to 4.53 mm using the estimator representing a single core waveguide design. The letter concludes by discussing the application of these estimators for (open-loop) model-predictive control and recommends future focus on advanced, structured soft (optical) sensors for model-free state estimation and control of soft robots.
* Accepted for publication in IEEE Robotics and Automation Letters (RA-L) 2024