 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructure-Preserving Gaussian Processes Via Discrete Euler-Lagrange Equations
May 07, 2026In this paper, we propose Lagrangian Gaussian Processes (LGPs) for probabilistic and data-efficient learning of dynamics via discrete forced Euler-Lagrange equations. Importantly, the geometric structure of the Lagrange-d'Alembert principle, which governs the motion of dynamical systems, is preserved by construction in the absence of external forces. This allows learning physically consistent models that overcome erroneous drift in the system's energy, thereby providing stable long-term predictions. At the core of our approach lie linear operators for Gaussian process conditioning, constructed from discrete forced Euler-Lagrange equations and variational discretization schemes. Thereby and unlike prior work, the method enables learning dynamics from discrete position snapshots, i.e., without access to a system's velocities or momenta. This is particularly relevant for a large class of practical scenarios where only position measurements are available, for instance, in motion capture or visual servoing applications. We demonstrate the data-efficiency and generalization capabilities of the LGPs in various synthetic and real-world case studies, including a real-world soft robot with hysteresis. The experimental results underscore that the LGPs learn physically consistent dynamics with uncertainty quantification solely from sparse positional data and enable stable long-term predictions.
Active Stereo-Camera Outperforms Multi-Sensor Setup in ACT Imitation Learning for Humanoid Manipulation
Mar 30, 2026The complexity of teaching humanoid robots new tasks is one of the major reasons hindering their widespread adoption in the industry. While Imitation Learning (IL), particularly Action Chunking with Transformers (ACT), enables rapid task acquisition, there is no consensus yet on the optimal sensory hardware required for manipulation tasks. This paper benchmarks 14 sensor combinations on the Unitree G1 humanoid robot equipped with three-finger hands for two manipulation tasks. We explicitly evaluate the integration of tactile and proprioceptive modalities alongside active vision. Our analysis demonstrates that strategic sensor selection can outperform complex configurations in data-limited regimes while reducing computational overhead. We develop an open-source Unified Ablation Framework that utilizes sensor masking on a comprehensive master dataset. Results indicate that additional modalities often degrade performance for IL with limited data. A minimal active stereo-camera setup outperformed complex multi-sensor configurations, achieving 87.5% success in a spatial generalization task and 94.4% in a structured manipulation task. Conversely, adding pressure sensors to this setup reduced success to 67.3% in the latter task due to a low signal-to-noise ratio. We conclude that in data-limited regimes, active vision offers a superior trade-off between robustness and complexity. While tactile modalities may require larger datasets to be effective, our findings validate that strategic sensor selection is critical for designing an efficient learning process.
Simultaneous State Estimation and Online Model Learning in a Soft Robotic System
Feb 15, 2026Operating complex real-world systems, such as soft robots, can benefit from precise predictive control schemes that require accurate state and model knowledge. This knowledge is typically not available in practical settings and must be inferred from noisy measurements. In particular, it is challenging to simultaneously estimate unknown states and learn a model online from sequentially arriving measurements. In this paper, we show how a recently proposed gray-box system identification tool enables the estimation of a soft robot's current pose while at the same time learning a bending stiffness model. For estimation and learning, we rely solely on a nominal constant-curvature robot model and measurements of the robot's base reactions (e.g., base forces). The estimation scheme -- relying on a marginalized particle filter -- allows us to conveniently interface nominal constant-curvature equations with a Gaussian Process (GP) bending stiffness model to be learned. This, in contrast to estimation via a random walk over stiffness values, enables prediction of bending stiffness and improves overall model quality. We demonstrate, using real-world soft-robot data, that the method learns a bending stiffness model online while accurately estimating the robot's pose. Notably, reduced multi-step forward-prediction errors indicate that the learned bending-stiffness GP improves overall model quality.
A Hybrid Autoencoder for Robust Heightmap Generation from Fused Lidar and Depth Data for Humanoid Robot Locomotion
Feb 05, 2026Reliable terrain perception is a critical prerequisite for the deployment of humanoid robots in unstructured, human-centric environments. While traditional systems often rely on manually engineered, single-sensor pipelines, this paper presents a learning-based framework that uses an intermediate, robot-centric heightmap representation. A hybrid Encoder-Decoder Structure (EDS) is introduced, utilizing a Convolutional Neural Network (CNN) for spatial feature extraction fused with a Gated Recurrent Unit (GRU) core for temporal consistency. The architecture integrates multimodal data from an Intel RealSense depth camera, a LIVOX MID-360 LiDAR processed via efficient spherical projection, and an onboard IMU. Quantitative results demonstrate that multimodal fusion improves reconstruction accuracy by 7.2% over depth-only and 9.9% over LiDAR-only configurations. Furthermore, the integration of a 3.2 s temporal context reduces mapping drift.
Learning Dynamics from Input-Output Data with Hamiltonian Gaussian Processes
Nov 07, 2025Embedding non-restrictive prior knowledge, such as energy conservation laws, in learning-based approaches is a key motive to construct physically consistent models from limited data, relevant for, e.g., model-based control. Recent work incorporates Hamiltonian dynamics into Gaussian Process (GP) regression to obtain uncertainty-quantifying models that adhere to the underlying physical principles. However, these works rely on velocity or momentum data, which is rarely available in practice. In this paper, we consider dynamics learning with non-conservative Hamiltonian GPs, and address the more realistic problem setting of learning from input-output data. We provide a fully Bayesian scheme for estimating probability densities of unknown hidden states, of GP hyperparameters, as well as of structural hyperparameters, such as damping coefficients. Considering the computational complexity of GPs, we take advantage of a reduced-rank GP approximation and leverage its properties for computationally efficient prediction and training. The proposed method is evaluated in a nonlinear simulation case study and compared to a state-of-the-art approach that relies on momentum measurements.
Adaptive Model-Predictive Control of a Soft Continuum Robot Using a Physics-Informed Neural Network Based on Cosserat Rod Theory
Aug 18, 2025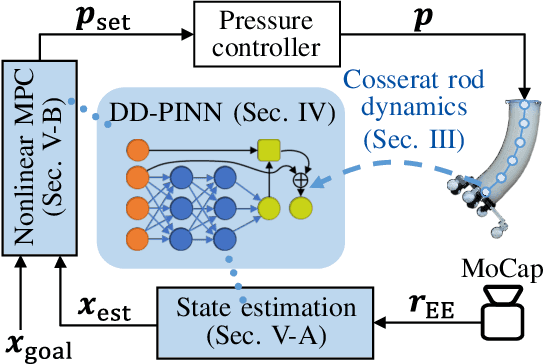
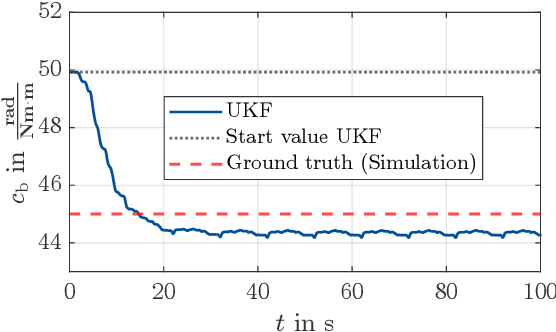
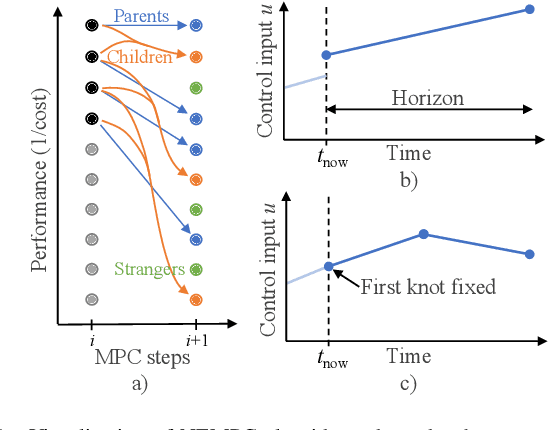
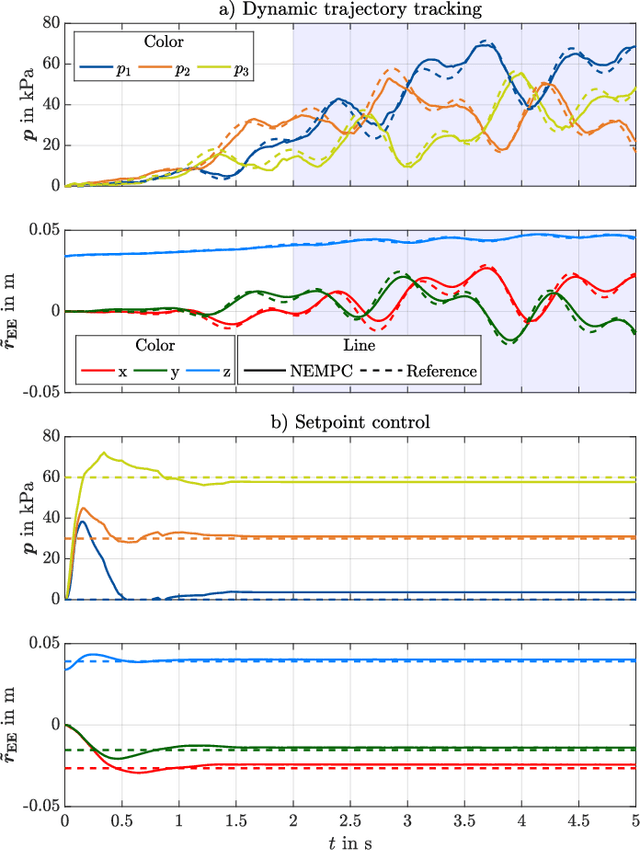
Dynamic control of soft continuum robots (SCRs) holds great potential for expanding their applications, but remains a challenging problem due to the high computational demands of accurate dynamic models. While data-driven approaches like Koopman-operator-based methods have been proposed, they typically lack adaptability and cannot capture the full robot shape, limiting their applicability. This work introduces a real-time-capable nonlinear model-predictive control (MPC) framework for SCRs based on a domain-decoupled physics-informed neural network (DD-PINN) with adaptable bending stiffness. The DD-PINN serves as a surrogate for the dynamic Cosserat rod model with a speed-up factor of 44000. It is also used within an unscented Kalman filter for estimating the model states and bending compliance from end-effector position measurements. We implement a nonlinear evolutionary MPC running at 70 Hz on the GPU. In simulation, it demonstrates accurate tracking of dynamic trajectories and setpoint control with end-effector position errors below 3 mm (2.3% of the actuator's length). In real-world experiments, the controller achieves similar accuracy and accelerations up to 3.55 m/s2.
Fast Contact Detection via Fusion of Joint and Inertial Sensors for Parallel Robots in Human-Robot Collaboration
May 13, 2025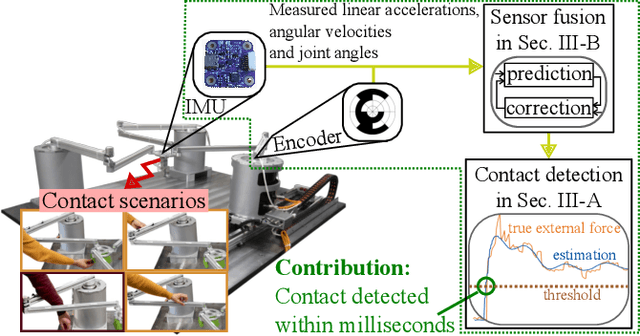
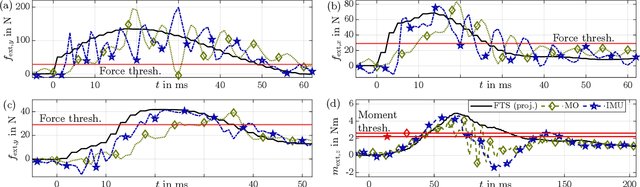
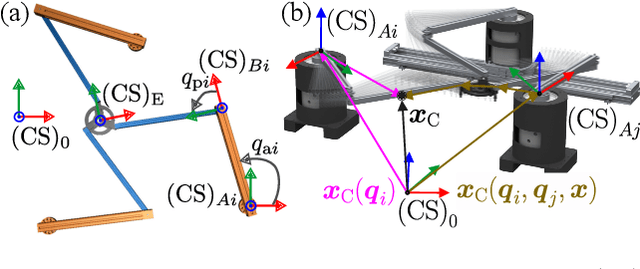
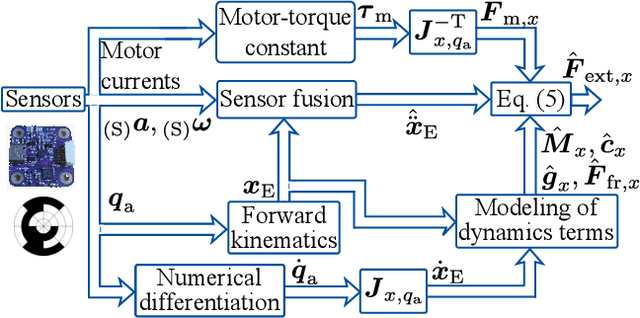
Fast contact detection is crucial for safe human-robot collaboration. Observers based on proprioceptive information can be used for contact detection but have first-order error dynamics, which results in delays. Sensor fusion based on inertial measurement units (IMUs) consisting of accelerometers and gyroscopes is advantageous for reducing delays. The acceleration estimation enables the direct calculation of external forces. For serial robots, the installation of multiple accelerometers and gyroscopes is required for dynamics modeling since the joint coordinates are the minimal coordinates. Alternatively, parallel robots (PRs) offer the potential to use only one IMU on the end-effector platform, which already presents the minimal coordinates of the PR. This work introduces a sensor-fusion method for contact detection using encoders and only one low-cost, consumer-grade IMU for a PR. The end-effector accelerations are estimated by an extended Kalman filter and incorporated into the dynamics to calculate external forces. In real-world experiments with a planar PR, we demonstrate that this approach reduces the detection duration by up to 50% compared to a momentum observer and enables the collision and clamping detection within 3-39ms.
Generalizable and Fast Surrogates: Model Predictive Control of Articulated Soft Robots using Physics-Informed Neural Networks
Feb 04, 2025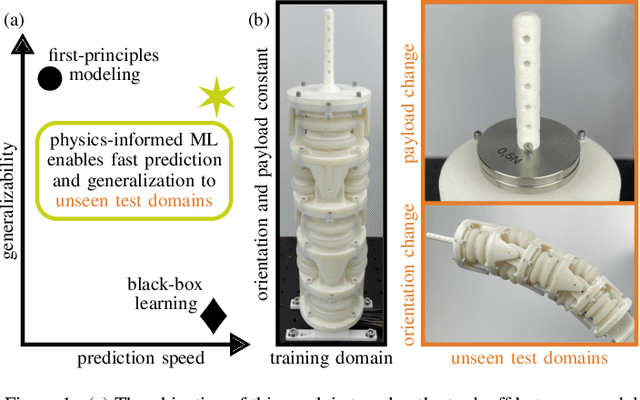
Soft robots can revolutionize several applications with high demands on dexterity and safety. When operating these systems, real-time estimation and control require fast and accurate models. However, prediction with first-principles (FP) models is slow, and learned black-box models have poor generalizability. Physics-informed machine learning offers excellent advantages here, but it is currently limited to simple, often simulated systems without considering changes after training. We propose physics-informed neural networks (PINNs) for articulated soft robots (ASRs) with a focus on data efficiency. The amount of expensive real-world training data is reduced to a minimum - one dataset in one system domain. Two hours of data in different domains are used for a comparison against two gold-standard approaches: In contrast to a recurrent neural network, the PINN provides a high generalizability. The prediction speed of an accurate FP model is improved with the PINN by up to a factor of 466 at slightly reduced accuracy. This enables nonlinear model predictive control (MPC) of the pneumatic ASR. In nine dynamic MPC experiments, an average joint-tracking error of 1.3{\deg} is achieved.
SafePR: Unified Approach for Safe Parallel Robots by Contact Detection and Reaction with Redundancy Resolution
Jan 29, 2025



Fast and safe motion is crucial for the successful deployment of physically interactive robots. Parallel robots (PRs) offer the potential for higher speeds while maintaining the same energy limits due to their low moving masses. However, they require methods for contact detection and reaction while avoiding singularities and self-collisions. We address this issue and present SafePR - a unified approach for the detection and localization, including the distinction between collision and clamping to perform a reaction that is safe for humans and feasible for PRs. Our approach uses information from the encoders and motor currents to estimate forces via a generalized-momentum observer. Neural networks and particle filters classify and localize the contacts. We introduce reactions with redundancy resolution to avoid type-II singularities and self-collisions. Our approach detected and terminated 72 real-world collision and clamping contacts with end-effector speeds of up to 1.5 m/s, each within 25-275 ms. The forces were below the thresholds from ISO/TS 15066. By using built-in sensors, SafePR enables safe interaction with already assembled PRs without the need for new hardware components.
Learning-based Nonlinear Model Predictive Control of Articulated Soft Robots using Recurrent Neural Networks
Nov 08, 2024Soft robots pose difficulties in terms of control, requiring novel strategies to effectively manipulate their compliant structures. Model-based approaches face challenges due to the high dimensionality and nonlinearities such as hysteresis effects. In contrast, learning-based approaches provide nonlinear models of different soft robots based only on measured data. In this paper, recurrent neural networks (RNNs) predict the behavior of an articulated soft robot (ASR) with five degrees of freedom (DoF). RNNs based on gated recurrent units (GRUs) are compared to the more commonly used long short-term memory (LSTM) networks and show better accuracy. The recurrence enables the capture of hysteresis effects that are inherent in soft robots due to viscoelasticity or friction but cannot be captured by simple feedforward networks. The data-driven model is used within a nonlinear model predictive control (NMPC), whereby the correct handling of the RNN's hidden states is focused. A training approach is presented that allows measured values to be utilized in each control cycle. This enables accurate predictions of short horizons based on sensor data, which is crucial for closed-loop NMPC. The proposed learning-based NMPC enables trajectory tracking with an average error of 1.2deg in experiments with the pneumatic five-DoF ASR.