 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDispelling Four Challenges in Inertial Motion Tracking with One Recurrent Inertial Graph-based Estimator (RING)
Sep 04, 2024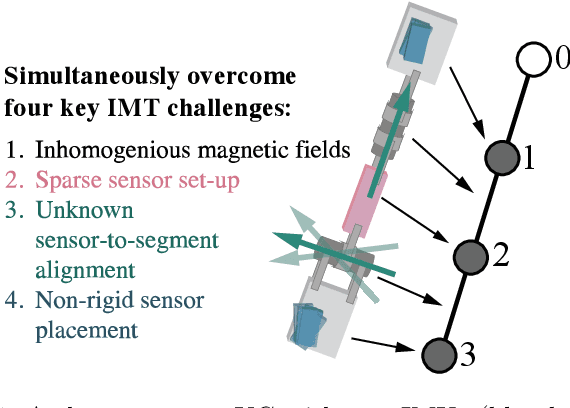

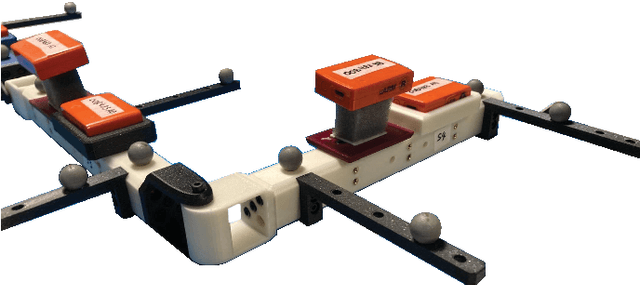

In this paper, we extend the Recurrent Inertial Graph-based Estimator (RING), a novel neural-network-based solution for Inertial Motion Tracking (IMT), to generalize across a large range of sampling rates, and we demonstrate that it can overcome four real-world challenges: inhomogeneous magnetic fields, sensor-to-segment misalignment, sparse sensor setups, and nonrigid sensor attachment. RING can estimate the rotational state of a three-segment kinematic chain with double hinge joints from inertial data, and achieves an experimental mean-absolute-(tracking)-error of 8.10 +/- 1.19 degrees if all four challenges are present simultaneously. The network is trained on simulated data yet evaluated on experimental data, highlighting its remarkable ability to zero-shot generalize from simulation to experiment. We conduct an ablation study to analyze the impact of each of the four challenges on RING's performance, we showcase its robustness to varying sampling rates, and we demonstrate that RING is capable of real-time operation. This research not only advances IMT technology by making it more accessible and versatile but also enhances its potential for new application domains including non-expert use of sparse IMT with nonrigid sensor attachments in unconstrained environments.
Observability of the relative motion from inertial data in kinematic chains
Feb 04, 2021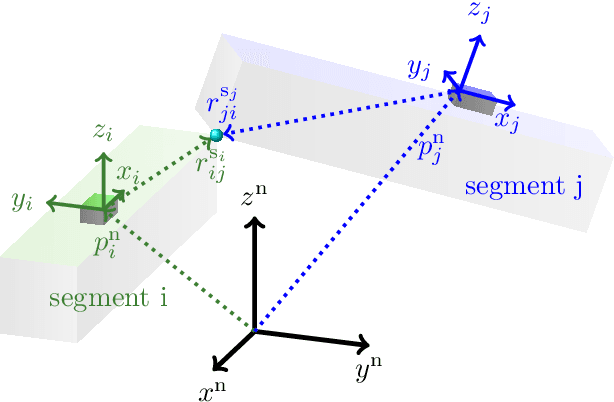
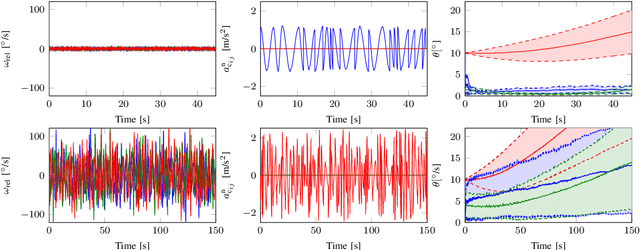
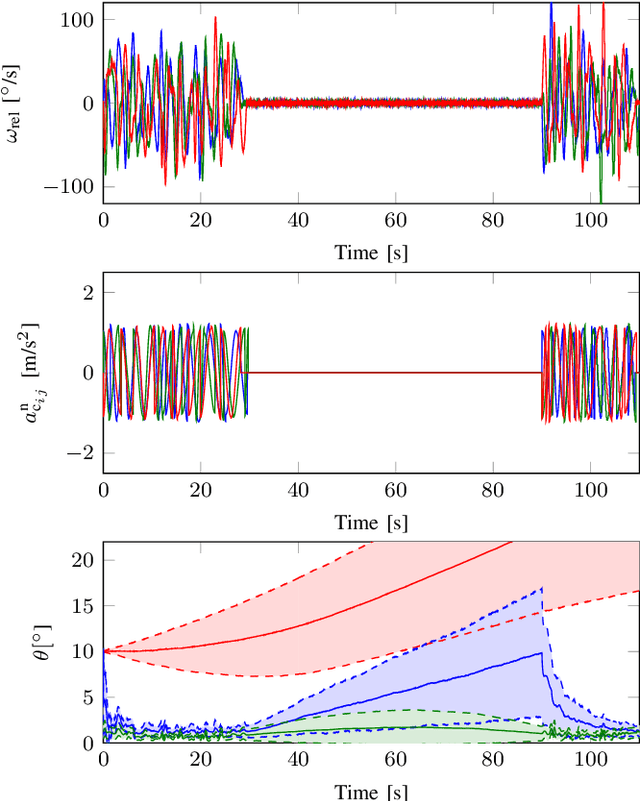
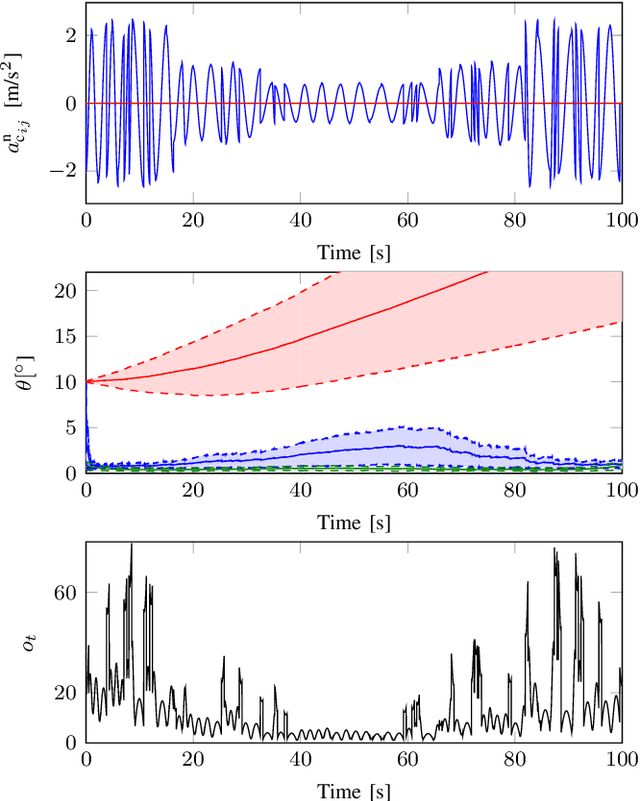
In recent years, it has been shown that the motion of kinematic chains can be estimated using measurements from inertial sensors placed on segments connected by rotational joints. These methods specifically avoid using magnetometer measurements, which are known to cause issues since the magnetic field at the different sensor locations is typically different. They rely on the assumption that the motion of the kinematic chain is sufficiently rich to assure / yield observability of the relative pose. However, a formal investigation of this crucial requirement has not yet been presented and no specific conditions for observability have so far been given. In this work, we present an observability analysis and show that the relative pose of the body segments is indeed observable under a very mild condition on the motion. We support these results by a simulation study, in which we also show the effect of stationary periods in the data and of the amount of excitation on the accuracy of the estimates. We use experimental data from a human gait experiment to show that the excitation level is sufficient for obtaining accurate estimates even when the subject remains stationary for a period of 47 seconds halfway during the experiment.