 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDispelling Four Challenges in Inertial Motion Tracking with One Recurrent Inertial Graph-based Estimator (RING)
Sep 04, 2024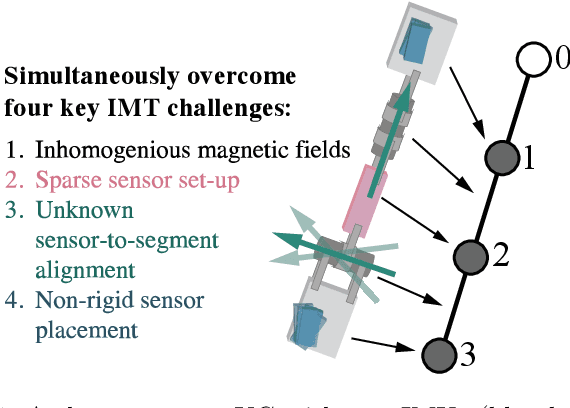

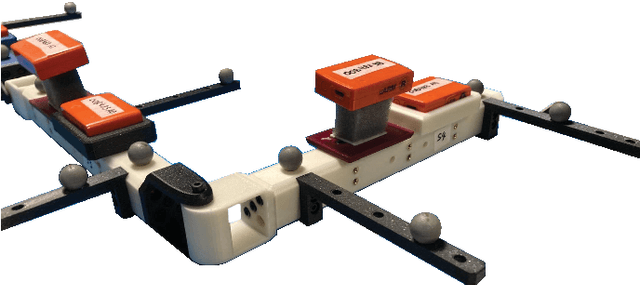

In this paper, we extend the Recurrent Inertial Graph-based Estimator (RING), a novel neural-network-based solution for Inertial Motion Tracking (IMT), to generalize across a large range of sampling rates, and we demonstrate that it can overcome four real-world challenges: inhomogeneous magnetic fields, sensor-to-segment misalignment, sparse sensor setups, and nonrigid sensor attachment. RING can estimate the rotational state of a three-segment kinematic chain with double hinge joints from inertial data, and achieves an experimental mean-absolute-(tracking)-error of 8.10 +/- 1.19 degrees if all four challenges are present simultaneously. The network is trained on simulated data yet evaluated on experimental data, highlighting its remarkable ability to zero-shot generalize from simulation to experiment. We conduct an ablation study to analyze the impact of each of the four challenges on RING's performance, we showcase its robustness to varying sampling rates, and we demonstrate that RING is capable of real-time operation. This research not only advances IMT technology by making it more accessible and versatile but also enhances its potential for new application domains including non-expert use of sparse IMT with nonrigid sensor attachments in unconstrained environments.
A Soft Robotic System Automatically Learns Precise Agile Motions Without Model Information
Aug 07, 2024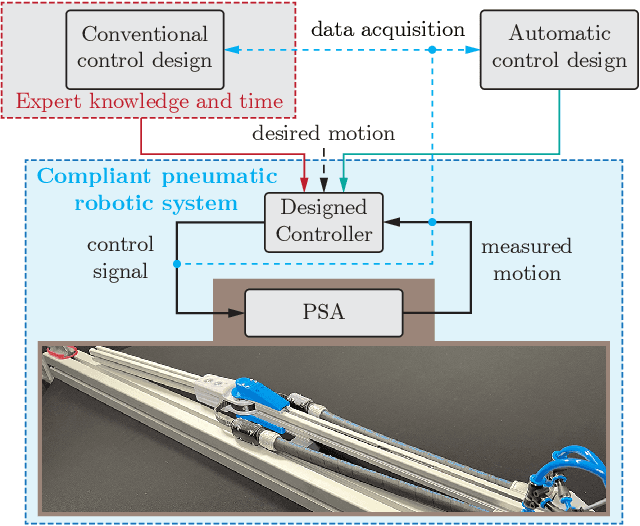
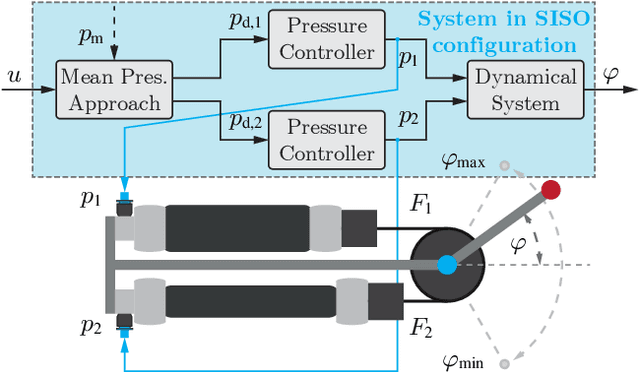
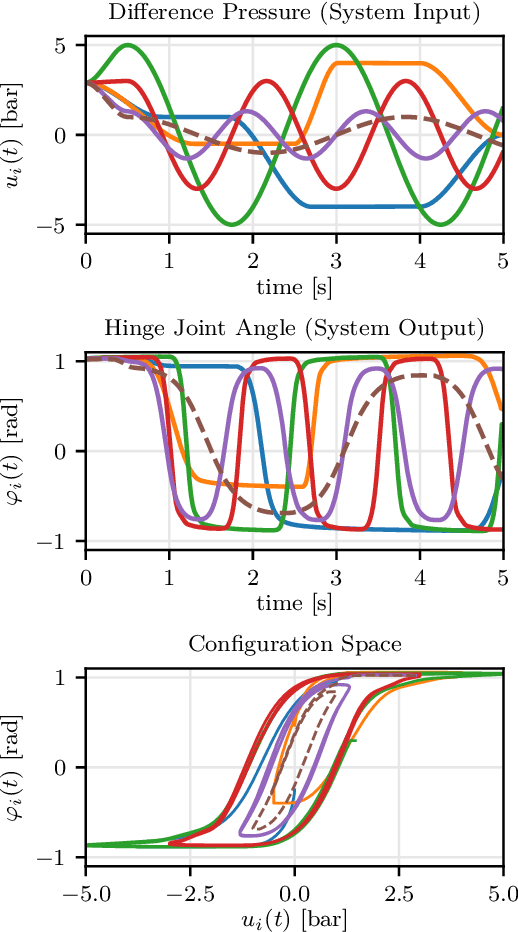
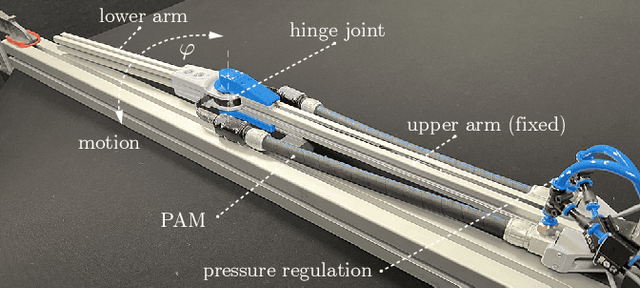
Many application domains, e.g., in medicine and manufacturing, can greatly benefit from pneumatic Soft Robots (SRs). However, the accurate control of SRs has remained a significant challenge to date, mainly due to their nonlinear dynamics and viscoelastic material properties. Conventional control design methods often rely on either complex system modeling or time-intensive manual tuning, both of which require significant amounts of human expertise and thus limit their practicality. In recent works, the data-driven method, Automatic Neural ODE Control (ANODEC) has been successfully used to -- fully automatically and utilizing only input-output data -- design controllers for various nonlinear systems in silico, and without requiring prior model knowledge or extensive manual tuning. In this work, we successfully apply ANODEC to automatically learn to perform agile, non-repetitive reference tracking motion tasks in a real-world SR and within a finite time horizon. To the best of the authors' knowledge, ANODEC achieves, for the first time, performant control of a SR with hysteresis effects from only 30 seconds of input-output data and without any prior model knowledge. We show that for multiple, qualitatively different and even out-of-training-distribution reference signals, a single feedback controller designed by ANODEC outperforms a manually tuned PID baseline consistently. Overall, this contribution not only further strengthens the validity of ANODEC, but it marks an important step towards more practical, easy-to-use SRs that can automatically learn to perform agile motions from minimal experimental interaction time.
AI-MOLE: Autonomous Iterative Motion Learning for Unknown Nonlinear Dynamics with Extensive Experimental Validation
Apr 09, 2024



This work proposes Autonomous Iterative Motion Learning (AI-MOLE), a method that enables systems with unknown, nonlinear dynamics to autonomously learn to solve reference tracking tasks. The method iteratively applies an input trajectory to the unknown dynamics, trains a Gaussian process model based on the experimental data, and utilizes the model to update the input trajectory until desired tracking performance is achieved. Unlike existing approaches, the proposed method determines necessary parameters automatically, i.e., AI-MOLE works plug-and-play and without manual parameter tuning. Furthermore, AI-MOLE only requires input/output information, but can also exploit available state information to accelerate learning. While other approaches are typically only validated in simulation or on a single real-world testbed using manually tuned parameters, we present the unprecedented result of validating the proposed method on three different real-world robots and a total of nine different reference tracking tasks without requiring any a priori model information or manual parameter tuning. Over all systems and tasks, AI-MOLE rapidly learns to track the references without requiring any manual parameter tuning at all, even if only input/output information is available.
* 9 pages, 6 figures, journal article