 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Soft Robotic System Automatically Learns Precise Agile Motions Without Model Information
Aug 07, 2024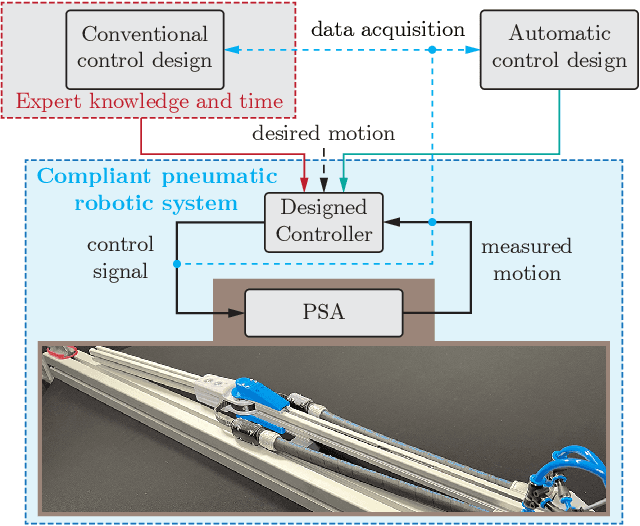
Many application domains, e.g., in medicine and manufacturing, can greatly benefit from pneumatic Soft Robots (SRs). However, the accurate control of SRs has remained a significant challenge to date, mainly due to their nonlinear dynamics and viscoelastic material properties. Conventional control design methods often rely on either complex system modeling or time-intensive manual tuning, both of which require significant amounts of human expertise and thus limit their practicality. In recent works, the data-driven method, Automatic Neural ODE Control (ANODEC) has been successfully used to -- fully automatically and utilizing only input-output data -- design controllers for various nonlinear systems in silico, and without requiring prior model knowledge or extensive manual tuning. In this work, we successfully apply ANODEC to automatically learn to perform agile, non-repetitive reference tracking motion tasks in a real-world SR and within a finite time horizon. To the best of the authors' knowledge, ANODEC achieves, for the first time, performant control of a SR with hysteresis effects from only 30 seconds of input-output data and without any prior model knowledge. We show that for multiple, qualitatively different and even out-of-training-distribution reference signals, a single feedback controller designed by ANODEC outperforms a manually tuned PID baseline consistently. Overall, this contribution not only further strengthens the validity of ANODEC, but it marks an important step towards more practical, easy-to-use SRs that can automatically learn to perform agile motions from minimal experimental interaction time.