 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimultaneous State Estimation and Online Model Learning in a Soft Robotic System
Feb 15, 2026Operating complex real-world systems, such as soft robots, can benefit from precise predictive control schemes that require accurate state and model knowledge. This knowledge is typically not available in practical settings and must be inferred from noisy measurements. In particular, it is challenging to simultaneously estimate unknown states and learn a model online from sequentially arriving measurements. In this paper, we show how a recently proposed gray-box system identification tool enables the estimation of a soft robot's current pose while at the same time learning a bending stiffness model. For estimation and learning, we rely solely on a nominal constant-curvature robot model and measurements of the robot's base reactions (e.g., base forces). The estimation scheme -- relying on a marginalized particle filter -- allows us to conveniently interface nominal constant-curvature equations with a Gaussian Process (GP) bending stiffness model to be learned. This, in contrast to estimation via a random walk over stiffness values, enables prediction of bending stiffness and improves overall model quality. We demonstrate, using real-world soft-robot data, that the method learns a bending stiffness model online while accurately estimating the robot's pose. Notably, reduced multi-step forward-prediction errors indicate that the learned bending-stiffness GP improves overall model quality.
A Hybrid Autoencoder for Robust Heightmap Generation from Fused Lidar and Depth Data for Humanoid Robot Locomotion
Feb 05, 2026Reliable terrain perception is a critical prerequisite for the deployment of humanoid robots in unstructured, human-centric environments. While traditional systems often rely on manually engineered, single-sensor pipelines, this paper presents a learning-based framework that uses an intermediate, robot-centric heightmap representation. A hybrid Encoder-Decoder Structure (EDS) is introduced, utilizing a Convolutional Neural Network (CNN) for spatial feature extraction fused with a Gated Recurrent Unit (GRU) core for temporal consistency. The architecture integrates multimodal data from an Intel RealSense depth camera, a LIVOX MID-360 LiDAR processed via efficient spherical projection, and an onboard IMU. Quantitative results demonstrate that multimodal fusion improves reconstruction accuracy by 7.2% over depth-only and 9.9% over LiDAR-only configurations. Furthermore, the integration of a 3.2 s temporal context reduces mapping drift.
Generalizable and Fast Surrogates: Model Predictive Control of Articulated Soft Robots using Physics-Informed Neural Networks
Feb 04, 2025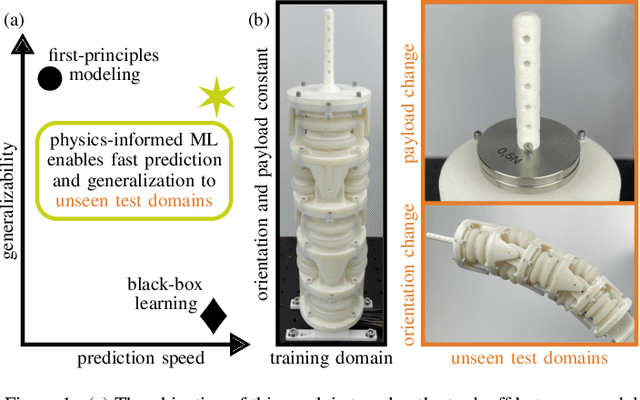
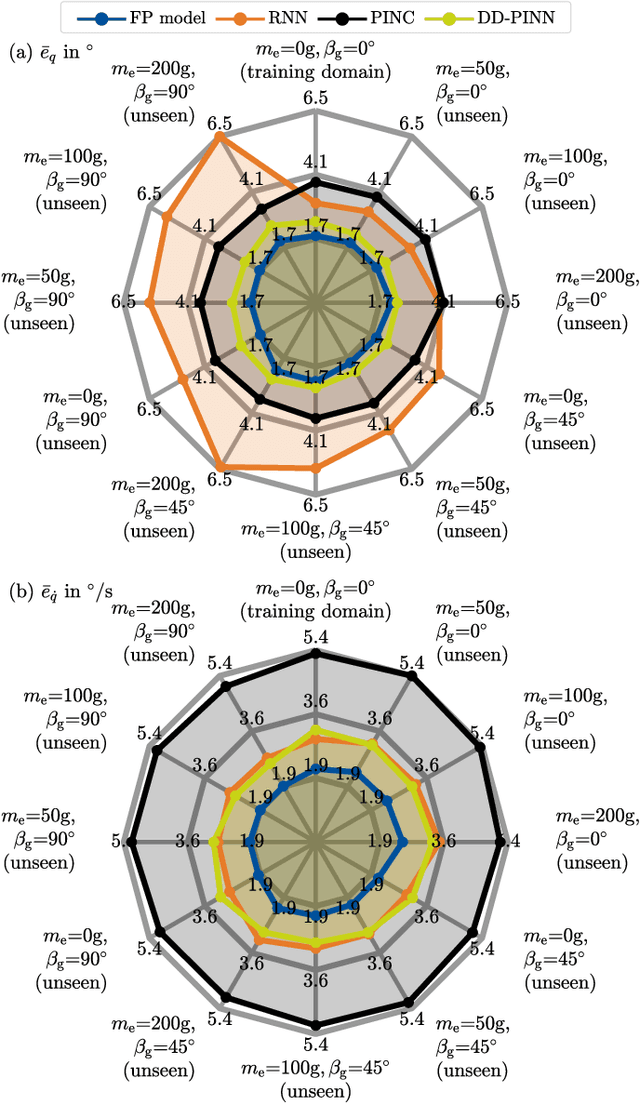
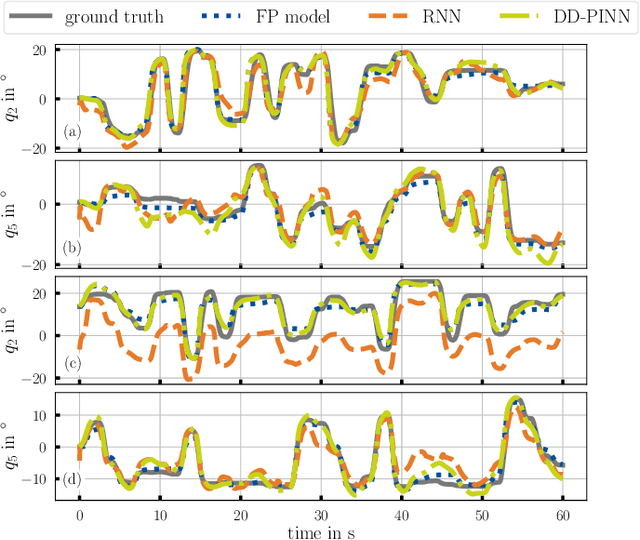
Soft robots can revolutionize several applications with high demands on dexterity and safety. When operating these systems, real-time estimation and control require fast and accurate models. However, prediction with first-principles (FP) models is slow, and learned black-box models have poor generalizability. Physics-informed machine learning offers excellent advantages here, but it is currently limited to simple, often simulated systems without considering changes after training. We propose physics-informed neural networks (PINNs) for articulated soft robots (ASRs) with a focus on data efficiency. The amount of expensive real-world training data is reduced to a minimum - one dataset in one system domain. Two hours of data in different domains are used for a comparison against two gold-standard approaches: In contrast to a recurrent neural network, the PINN provides a high generalizability. The prediction speed of an accurate FP model is improved with the PINN by up to a factor of 466 at slightly reduced accuracy. This enables nonlinear model predictive control (MPC) of the pneumatic ASR. In nine dynamic MPC experiments, an average joint-tracking error of 1.3{\deg} is achieved.
Learning-based Nonlinear Model Predictive Control of Articulated Soft Robots using Recurrent Neural Networks
Nov 08, 2024Soft robots pose difficulties in terms of control, requiring novel strategies to effectively manipulate their compliant structures. Model-based approaches face challenges due to the high dimensionality and nonlinearities such as hysteresis effects. In contrast, learning-based approaches provide nonlinear models of different soft robots based only on measured data. In this paper, recurrent neural networks (RNNs) predict the behavior of an articulated soft robot (ASR) with five degrees of freedom (DoF). RNNs based on gated recurrent units (GRUs) are compared to the more commonly used long short-term memory (LSTM) networks and show better accuracy. The recurrence enables the capture of hysteresis effects that are inherent in soft robots due to viscoelasticity or friction but cannot be captured by simple feedforward networks. The data-driven model is used within a nonlinear model predictive control (NMPC), whereby the correct handling of the RNN's hidden states is focused. A training approach is presented that allows measured values to be utilized in each control cycle. This enables accurate predictions of short horizons based on sensor data, which is crucial for closed-loop NMPC. The proposed learning-based NMPC enables trajectory tracking with an average error of 1.2deg in experiments with the pneumatic five-DoF ASR.
Traffic Queue Length and Pressure Estimation for Road Networks with Geometric Deep Learning Algorithms
May 09, 2019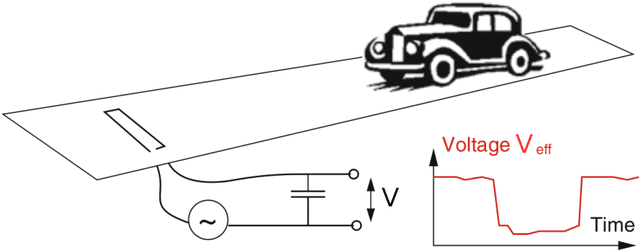
Due to urbanization and the increase of individual mobility, in most metropolitan areas around the world congestion and inefficient traffic management occur. Highly necessary intelligent traffic control systems, which are able to reduce congestion, rely on measurements of traffic situations in urban road networks and freeways. Unfortunately, the instrumentation for accurate traffic measurement is expensive and not widely implemented. This thesis addresses this problem, where relatively inexpensive and easy to install loop-detectors are used by a geometric deep learning algorithm, which uses loop-detector data in a spatial context of a road network, to estimate queue length in front of signalized intersections, which can be then used for following traffic control tasks. Therefore, in the first part of this work a conventional estimation method for queue length (which does not use machine learning techniques) based on second-by-second loop-detector data is implemented, which uses detected shockwaves in queues to estimate the length and point of time for the maximum queue. The method is later used as reference but also as additional input information for the geometric deep learning approach. In the second part the geometric deep learning algorithm is developed, which uses spatial correlations in the road network but also temporal correlations in detector data time sequences by new attention mechanisms, to overcome the limitations of conventional methods like excess traffic demand, lane changing and stop-and-go traffic. Therefore, it is necessary to abstract the topology of the road network in a graph. Both approaches are compared regarding their performance, reliability as well as limitations and validated by usage of the traffic simulation software SUMO (Simulation of Urban MObility). Finally, the results are discussed in the conclusions and further investigations are suggested.
Neural-Attention-Based Deep Learning Architectures for Modeling Traffic Dynamics on Lane Graphs
Apr 23, 2019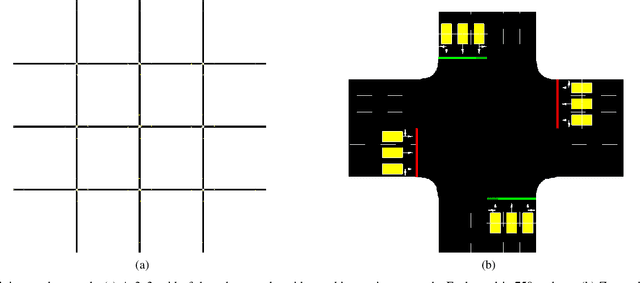
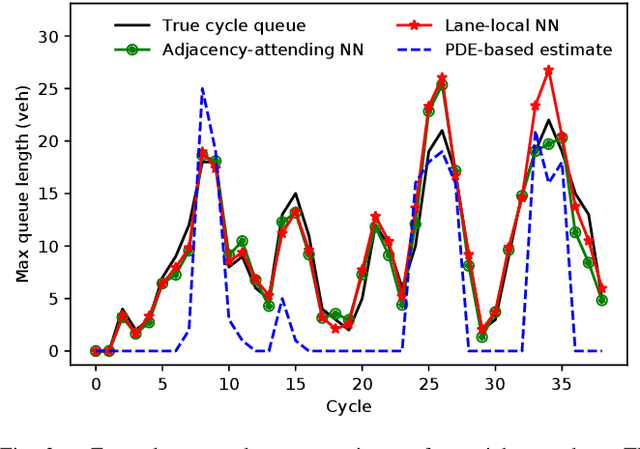
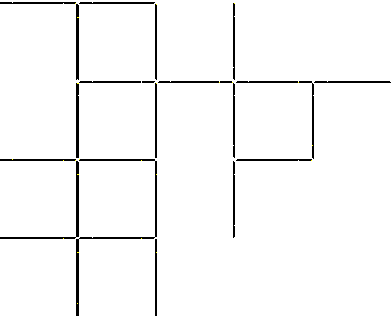
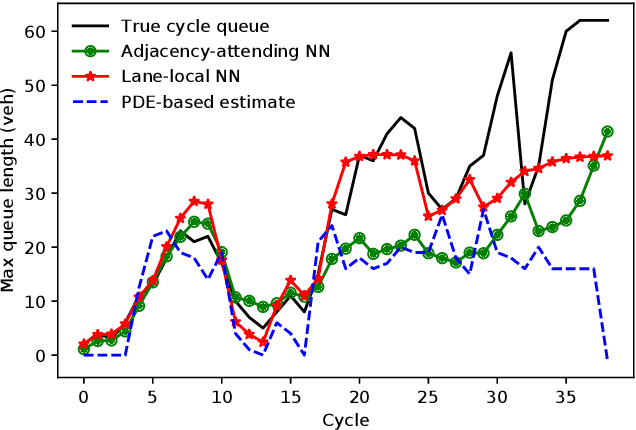
Deep neural networks can be powerful tools, but require careful application-specific design to ensure that the most informative relationships in the data are learnable. In this paper, we apply deep neural networks to the nonlinear spatiotemporal physics problem of vehicle traffic dynamics. We consider problems of estimating macroscopic quantities (e.g., the queue at an intersection) at a lane level. First-principles modeling at the lane scale has been a challenge due to complexities in modeling social behaviors like lane changes, and those behaviors' resultant macro-scale effects. Following domain knowledge that upstream/downstream lanes and neighboring lanes affect each others' traffic flows in distinct ways, we apply a form of neural attention that allows the neural network layers to aggregate information from different lanes in different manners. Using a microscopic traffic simulator as a testbed, we obtain results showing that an attentional neural network model can use information from nearby lanes to improve predictions, and, that explicitly encoding the lane-to-lane relationship types significantly improves performance. We also demonstrate the transfer of our learned neural network to a more complex road network, discuss how its performance degradation may be attributable to new traffic behaviors induced by increased topological complexity, and motivate learning dynamics models from many road network topologies.