 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Model-Predictive Control of a Soft Continuum Robot Using a Physics-Informed Neural Network Based on Cosserat Rod Theory
Aug 18, 2025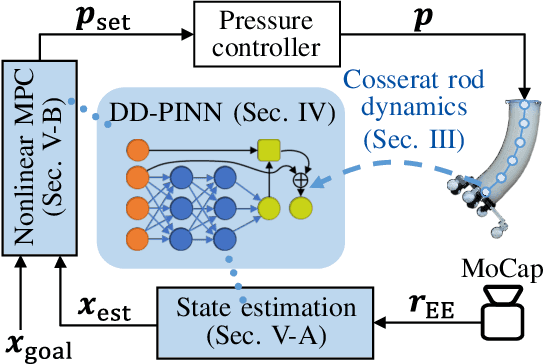
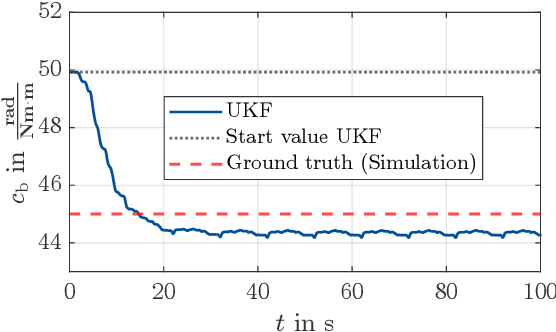
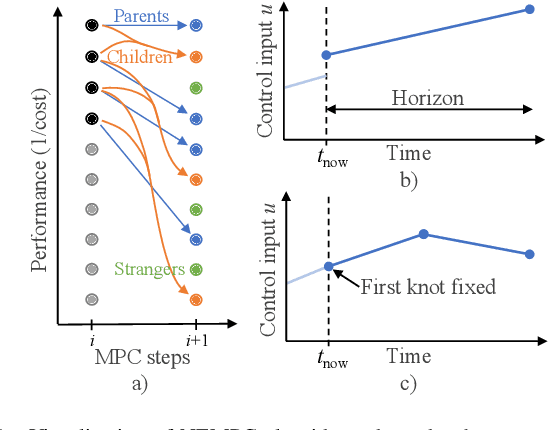
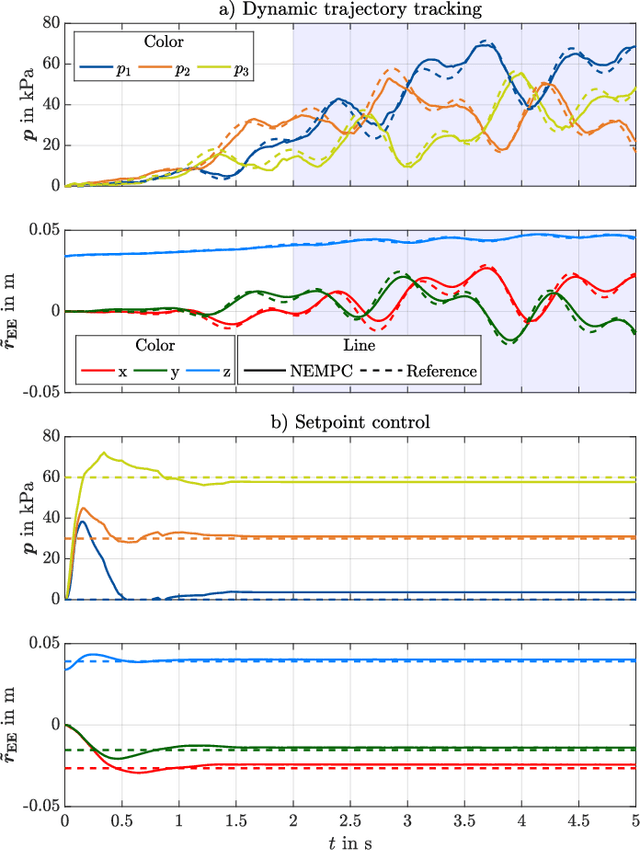
Dynamic control of soft continuum robots (SCRs) holds great potential for expanding their applications, but remains a challenging problem due to the high computational demands of accurate dynamic models. While data-driven approaches like Koopman-operator-based methods have been proposed, they typically lack adaptability and cannot capture the full robot shape, limiting their applicability. This work introduces a real-time-capable nonlinear model-predictive control (MPC) framework for SCRs based on a domain-decoupled physics-informed neural network (DD-PINN) with adaptable bending stiffness. The DD-PINN serves as a surrogate for the dynamic Cosserat rod model with a speed-up factor of 44000. It is also used within an unscented Kalman filter for estimating the model states and bending compliance from end-effector position measurements. We implement a nonlinear evolutionary MPC running at 70 Hz on the GPU. In simulation, it demonstrates accurate tracking of dynamic trajectories and setpoint control with end-effector position errors below 3 mm (2.3% of the actuator's length). In real-world experiments, the controller achieves similar accuracy and accelerations up to 3.55 m/s2.
Generalizable and Fast Surrogates: Model Predictive Control of Articulated Soft Robots using Physics-Informed Neural Networks
Feb 04, 2025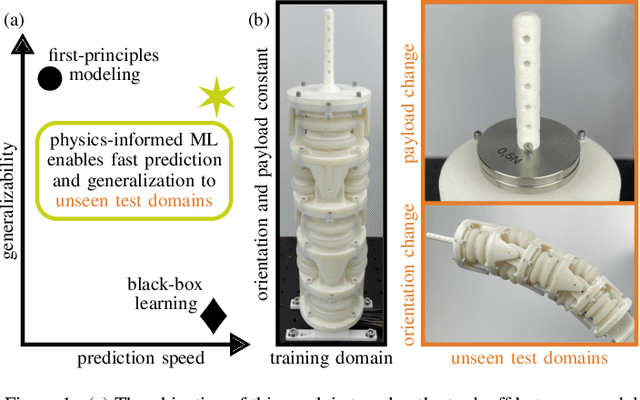
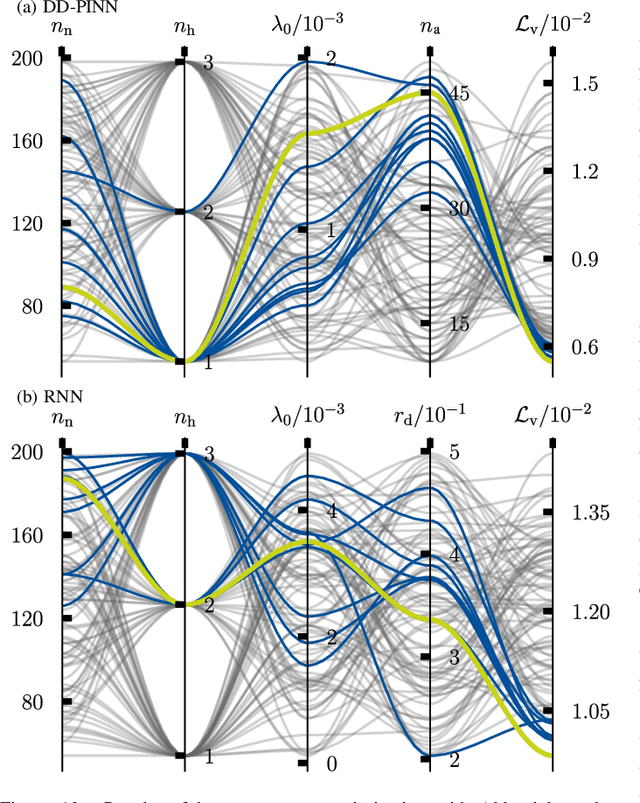
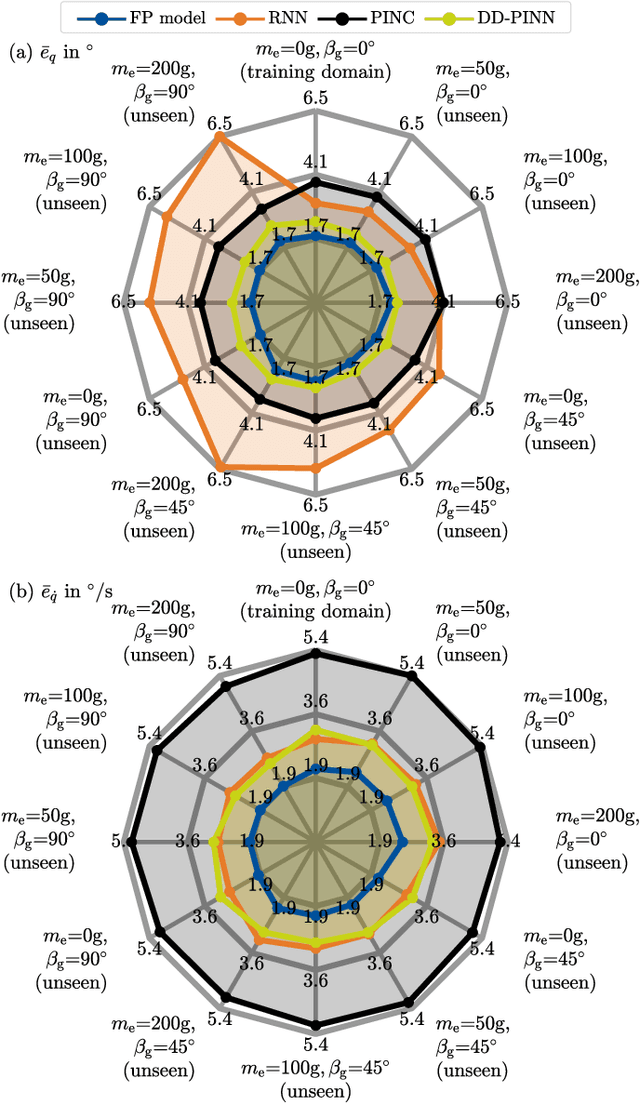
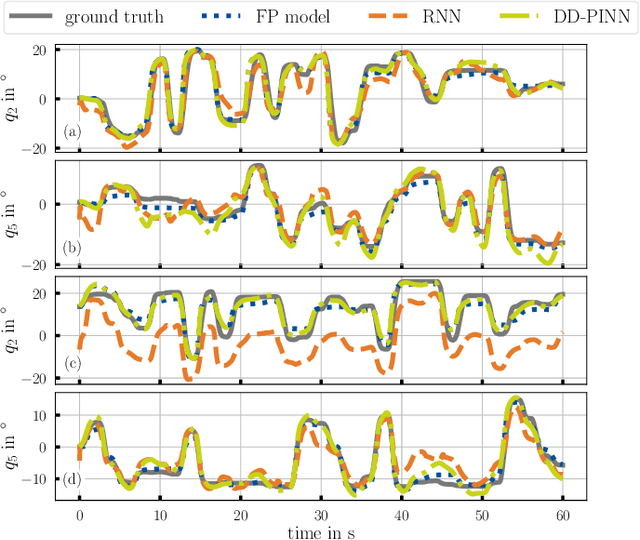
Soft robots can revolutionize several applications with high demands on dexterity and safety. When operating these systems, real-time estimation and control require fast and accurate models. However, prediction with first-principles (FP) models is slow, and learned black-box models have poor generalizability. Physics-informed machine learning offers excellent advantages here, but it is currently limited to simple, often simulated systems without considering changes after training. We propose physics-informed neural networks (PINNs) for articulated soft robots (ASRs) with a focus on data efficiency. The amount of expensive real-world training data is reduced to a minimum - one dataset in one system domain. Two hours of data in different domains are used for a comparison against two gold-standard approaches: In contrast to a recurrent neural network, the PINN provides a high generalizability. The prediction speed of an accurate FP model is improved with the PINN by up to a factor of 466 at slightly reduced accuracy. This enables nonlinear model predictive control (MPC) of the pneumatic ASR. In nine dynamic MPC experiments, an average joint-tracking error of 1.3{\deg} is achieved.
SafePR: Unified Approach for Safe Parallel Robots by Contact Detection and Reaction with Redundancy Resolution
Jan 29, 2025



Fast and safe motion is crucial for the successful deployment of physically interactive robots. Parallel robots (PRs) offer the potential for higher speeds while maintaining the same energy limits due to their low moving masses. However, they require methods for contact detection and reaction while avoiding singularities and self-collisions. We address this issue and present SafePR - a unified approach for the detection and localization, including the distinction between collision and clamping to perform a reaction that is safe for humans and feasible for PRs. Our approach uses information from the encoders and motor currents to estimate forces via a generalized-momentum observer. Neural networks and particle filters classify and localize the contacts. We introduce reactions with redundancy resolution to avoid type-II singularities and self-collisions. Our approach detected and terminated 72 real-world collision and clamping contacts with end-effector speeds of up to 1.5 m/s, each within 25-275 ms. The forces were below the thresholds from ISO/TS 15066. By using built-in sensors, SafePR enables safe interaction with already assembled PRs without the need for new hardware components.
Learning-based Nonlinear Model Predictive Control of Articulated Soft Robots using Recurrent Neural Networks
Nov 08, 2024Soft robots pose difficulties in terms of control, requiring novel strategies to effectively manipulate their compliant structures. Model-based approaches face challenges due to the high dimensionality and nonlinearities such as hysteresis effects. In contrast, learning-based approaches provide nonlinear models of different soft robots based only on measured data. In this paper, recurrent neural networks (RNNs) predict the behavior of an articulated soft robot (ASR) with five degrees of freedom (DoF). RNNs based on gated recurrent units (GRUs) are compared to the more commonly used long short-term memory (LSTM) networks and show better accuracy. The recurrence enables the capture of hysteresis effects that are inherent in soft robots due to viscoelasticity or friction but cannot be captured by simple feedforward networks. The data-driven model is used within a nonlinear model predictive control (NMPC), whereby the correct handling of the RNN's hidden states is focused. A training approach is presented that allows measured values to be utilized in each control cycle. This enables accurate predictions of short horizons based on sensor data, which is crucial for closed-loop NMPC. The proposed learning-based NMPC enables trajectory tracking with an average error of 1.2deg in experiments with the pneumatic five-DoF ASR.
Domain-decoupled Physics-informed Neural Networks with Closed-form Gradients for Fast Model Learning of Dynamical Systems
Aug 27, 2024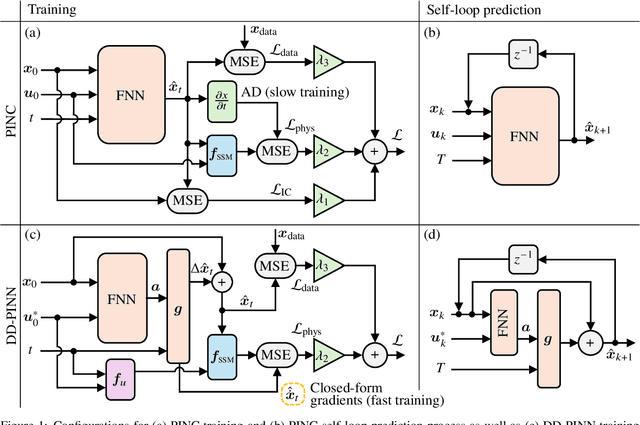
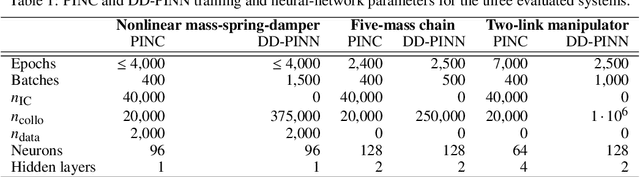
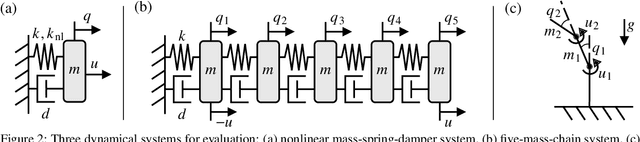

Physics-informed neural networks (PINNs) are trained using physical equations and can also incorporate unmodeled effects by learning from data. PINNs for control (PINCs) of dynamical systems are gaining interest due to their prediction speed compared to classical numerical integration methods for nonlinear state-space models, making them suitable for real-time control applications. We introduce the domain-decoupled physics-informed neural network (DD-PINN) to address current limitations of PINC in handling large and complex nonlinear dynamic systems. The time domain is decoupled from the feed-forward neural network to construct an Ansatz function, allowing for calculation of gradients in closed form. This approach significantly reduces training times, especially for large dynamical systems, compared to PINC, which relies on graph-based automatic differentiation. Additionally, the DD-PINN inherently fulfills the initial condition and supports higher-order excitation inputs, simplifying the training process and enabling improved prediction accuracy. Validation on three systems - a nonlinear mass-spring-damper, a five-mass-chain, and a two-link robot - demonstrates that the DD-PINN achieves significantly shorter training times. In cases where the PINC's prediction diverges, the DD-PINN's prediction remains stable and accurate due to higher physics loss reduction or use of a higher-order excitation input. The DD-PINN allows for fast and accurate learning of large dynamical systems previously out of reach for the PINC.
SPONGE: Open-Source Designs of Modular Articulated Soft Robots
Apr 16, 2024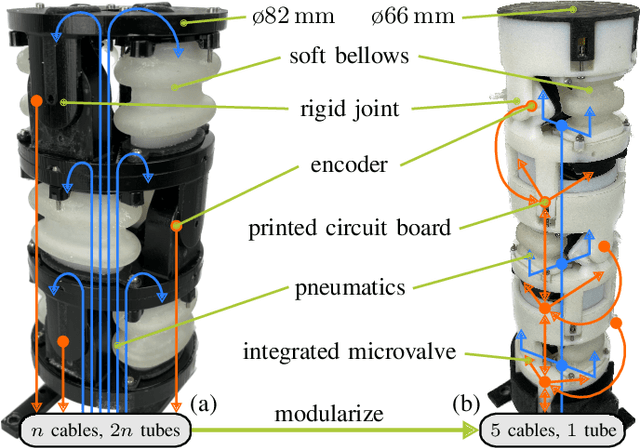
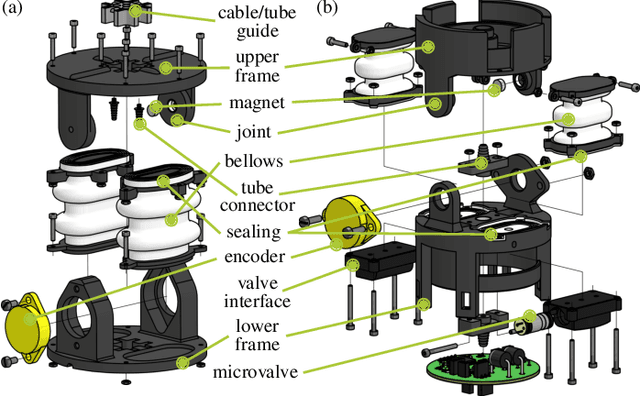
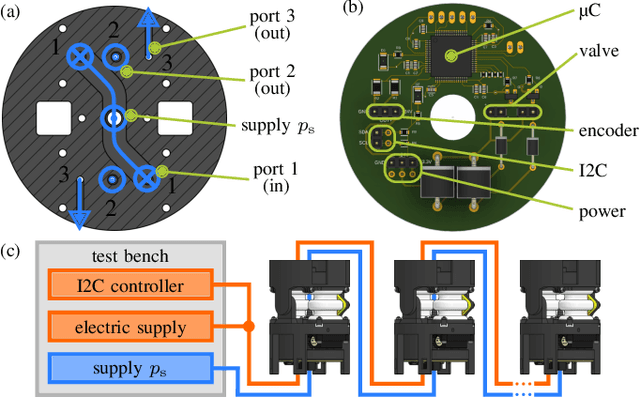
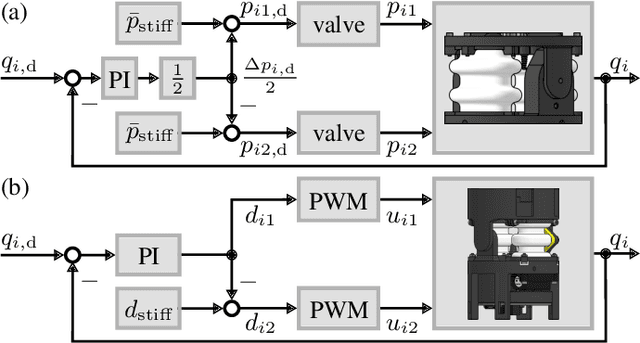
Soft-robot designs are manifold, but only a few are publicly available. Often, these are only briefly described in their publications. This complicates reproduction, and hinders the reproducibility and comparability of research results. If the designs were uniform and open source, validating researched methods on real benchmark systems would be possible. To address this, we present two variants of a soft pneumatic robot with antagonistic bellows as open source. Starting from a semi-modular design with multiple cables and tubes routed through the robot body, the transition to a fully modular robot with integrated microvalves and serial communication is highlighted. Modularity in terms of stackability, actuation, and communication is achieved, which is the crucial requirement for building soft robots with many degrees of freedom and high dexterity for real-world tasks. Both systems are compared regarding their respective advantages and disadvantages. The robots' functionality is demonstrated in experiments on airtightness, gravitational influence, position control with mean tracking errors of <3 deg, and long-term operation of cast and printed bellows. All soft- and hardware files required for reproduction are provided.
Safe Collision and Clamping Reaction for Parallel Robots During Human-Robot Collaboration
Aug 18, 2023Parallel robots (PRs) offer the potential for safe human-robot collaboration because of their low moving masses. Due to the in-parallel kinematic chains, the risk of contact in the form of collisions and clamping at a chain increases. Ensuring safety is investigated in this work through various contact reactions on a real planar PR. External forces are estimated based on proprioceptive information and a dynamics model, which allows contact detection. Retraction along the direction of the estimated line of action provides an instantaneous response to limit the occurring contact forces within the experiment to 70N at a maximum velocity 0.4m/s. A reduction in the stiffness of a Cartesian impedance control is investigated as a further strategy. For clamping, a feedforward neural network (FNN) is trained and tested in different joint angle configurations to classify whether a collision or clamping occurs with an accuracy of 80%. A second FNN classifies the clamping kinematic chain to enable a subsequent kinematic projection of the clamping joint angle onto the rotational platform coordinates. In this way, a structure opening is performed in addition to the softer retraction movement. The reaction strategies are compared in real-world experiments at different velocities and controller stiffnesses to demonstrate their effectiveness. The results show that in all collision and clamping experiments the PR terminates the contact in less than 130ms.
Learning-based Position and Stiffness Feedforward Control of Antagonistic Soft Pneumatic Actuators using Gaussian Processes
Mar 03, 2023Variable stiffness actuator (VSA) designs are manifold. Conventional model-based control of these nonlinear systems is associated with high effort and design-dependent assumptions. In contrast, machine learning offers a promising alternative as models are trained on real measured data and nonlinearities are inherently taken into account. Our work presents a universal, learning-based approach for position and stiffness control of soft actuators. After introducing a soft pneumatic VSA, the model is learned with input-output data. For this purpose, a test bench was set up which enables automated measurement of the variable joint stiffness. During control, Gaussian processes are used to predict pressures for achieving desired position and stiffness. The feedforward error is on average 11.5% of the total pressure range and is compensated by feedback control. Experiments with the soft actuator show that the learning-based approach allows continuous adjustment of position and stiffness without model knowledge.
Intuitive Telemanipulation of Hyper-Redundant Snake Robots within Locomotion and Reorientation using Task-Priority Inverse Kinematics
Feb 28, 2023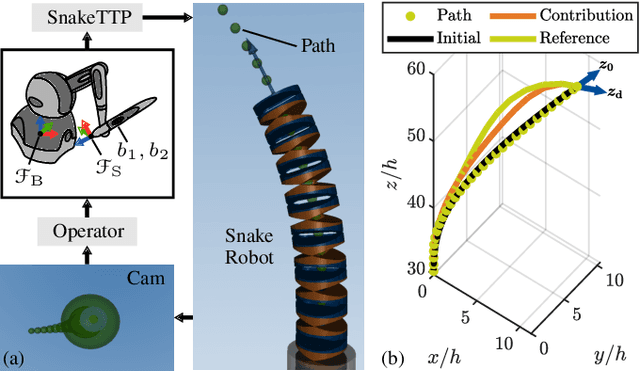
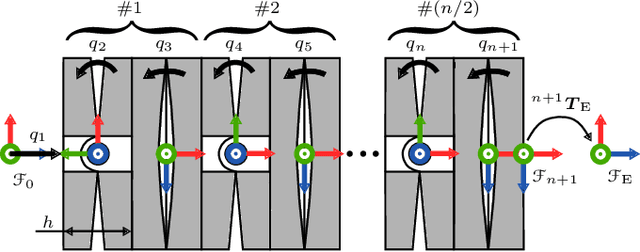
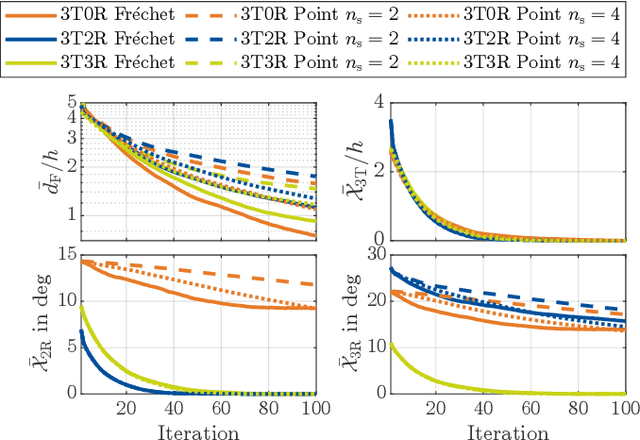
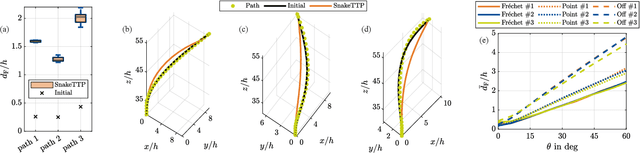
Snake robots offer considerable potential for endoscopic interventions due to their ability to follow curvilinear paths. Telemanipulation is an open problem due to hyper-redundancy, as input devices only allow a specification of six degrees of freedom. Our work addresses this by presenting a unified telemanipulation strategy which enables follow-the-leader locomotion and reorientation keeping the shape change as small as possible. The basis for this is a novel shape-fitting approach for solving the inverse kinematics in only a few milliseconds. Shape fitting is performed by maximizing the similarity of two curves using Fr\'echet distance while simultaneously specifying the position and orientation of the end effector. Telemanipulation performance is investigated in a study in which 14 participants controlled a simulated snake robot to locomote into the target area. In a final validation, pivot reorientation within the target area is addressed.
Have I been here before? Learning to Close the Loop with LiDAR Data in Graph-Based SLAM
Mar 11, 2021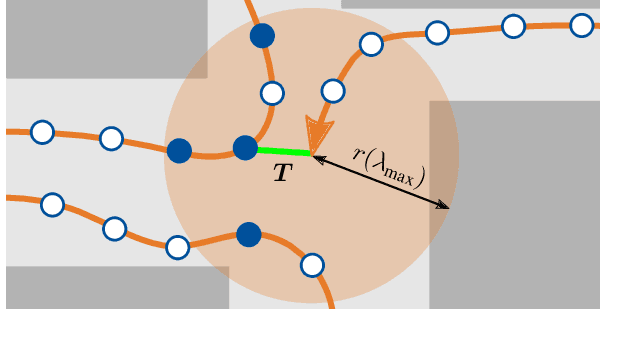
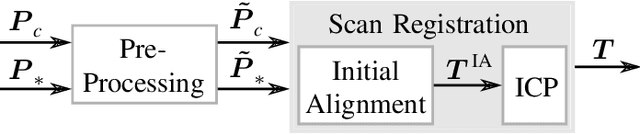
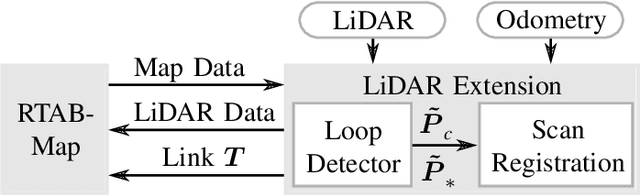
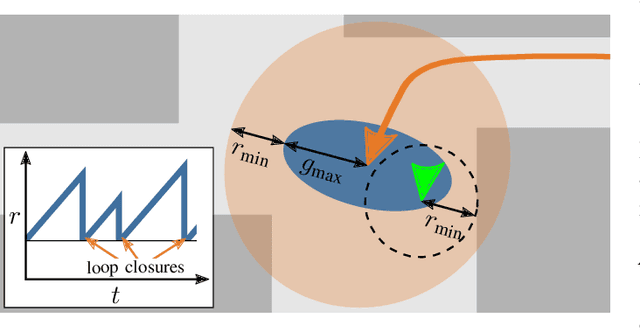
This work presents an extension of graph-based SLAM methods to exploit the potential of 3D laser scans for loop detection. Every high-dimensional point cloud is replaced by a compact global descriptor, whereby a trained detector decides whether a loop exists. Searching for loops is performed locally in a variable space to consider the odometry drift. Since closing a wrong loop has fatal consequences, an extensive verification is performed before acceptance. The proposed algorithm is implemented as an extension of the widely used state-of-the-art library RTAB-Map, and several experiments show the improvement: During SLAM with a mobile service robot in changing indoor and outdoor campus environments, our approach improves RTAB-Map regarding total number of closed loops. Especially in the presence of significant environmental changes, which typically lead to failure, localization becomes possible by our extension. Experiments with a car in traffic (KITTI benchmark) show the general applicability of our approach. These results are comparable to the state-of-the-art LiDAR method LOAM. The developed ROS package is freely available.