 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-based Position and Stiffness Feedforward Control of Antagonistic Soft Pneumatic Actuators using Gaussian Processes
Mar 03, 2023Variable stiffness actuator (VSA) designs are manifold. Conventional model-based control of these nonlinear systems is associated with high effort and design-dependent assumptions. In contrast, machine learning offers a promising alternative as models are trained on real measured data and nonlinearities are inherently taken into account. Our work presents a universal, learning-based approach for position and stiffness control of soft actuators. After introducing a soft pneumatic VSA, the model is learned with input-output data. For this purpose, a test bench was set up which enables automated measurement of the variable joint stiffness. During control, Gaussian processes are used to predict pressures for achieving desired position and stiffness. The feedforward error is on average 11.5% of the total pressure range and is compensated by feedback control. Experiments with the soft actuator show that the learning-based approach allows continuous adjustment of position and stiffness without model knowledge.
Improved Calibration Procedure for Wireless Inertial Measurement Units without Precision Equipment
Jul 11, 2022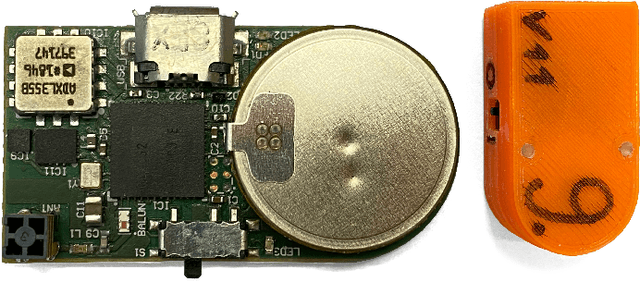



Inertial measurement units (IMUs) are used in medical applications for many different purposes. However, an IMU's measurement accuracy can degrade over time, entailing re-calibration. In their 2014 paper, Tedaldi et al. presented an IMU calibration method that does not require external precision equipment or complex procedures. This allows end-users or personnel without expert knowledge of inertial measurement to re-calibrate the sensors by placing them in several suitable but not precisely defined orientations. In this work, we present several improvements to Tedaldi's method, both on the algorithmic level and the calibration procedure: adaptions for low noise accelerometers, a calibration helper object, and packet loss compensation for wireless calibration. We applied the modified calibration procedure to our custom-built IMU platform and verified the consistency of results across multiple calibration runs. In order to minimize the time needed for re-calibration, we analyzed how the calibration result accuracy degrades when fewer calibration orientations are used. We found that N=12 different orientations are sufficient to achieve a very good calibration, and more orientations yielded only marginal improvements. This is a significant improvement compared to the 37 to 50 orientations recommended by Tedaldi. Thus, we were reduced the time required to calibrate a single IMU from ca. 5 minutes to less than 2 minutes without sacrificing any meaningful calibration accuracy.