 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntuitive Telemanipulation of Hyper-Redundant Snake Robots within Locomotion and Reorientation using Task-Priority Inverse Kinematics
Feb 28, 2023Snake robots offer considerable potential for endoscopic interventions due to their ability to follow curvilinear paths. Telemanipulation is an open problem due to hyper-redundancy, as input devices only allow a specification of six degrees of freedom. Our work addresses this by presenting a unified telemanipulation strategy which enables follow-the-leader locomotion and reorientation keeping the shape change as small as possible. The basis for this is a novel shape-fitting approach for solving the inverse kinematics in only a few milliseconds. Shape fitting is performed by maximizing the similarity of two curves using Fr\'echet distance while simultaneously specifying the position and orientation of the end effector. Telemanipulation performance is investigated in a study in which 14 participants controlled a simulated snake robot to locomote into the target area. In a final validation, pivot reorientation within the target area is addressed.
A Comprehensive Study of Modern Architectures and Regularization Approaches on CheXpert5000
Feb 13, 2023Computer aided diagnosis (CAD) has gained an increased amount of attention in the general research community over the last years as an example of a typical limited data application - with experiments on labeled 100k-200k datasets. Although these datasets are still small compared to natural image datasets like ImageNet1k, ImageNet21k and JFT, they are large for annotated medical datasets, where 1k-10k labeled samples are much more common. There is no baseline on which methods to build on in the low data regime. In this work we bridge this gap by providing an extensive study on medical image classification with limited annotations (5k). We present a study of modern architectures applied to a fixed low data regime of 5000 images on the CheXpert dataset. Conclusively we find that models pretrained on ImageNet21k achieve a higher AUC and larger models require less training steps. All models are quite well calibrated even though we only fine-tuned on 5000 training samples. All 'modern' architectures have higher AUC than ResNet50. Regularization of Big Transfer Models with MixUp or Mean Teacher improves calibration, MixUp also improves accuracy. Vision Transformer achieve comparable or on par results to Big Transfer Models.
Sobi: An Interactive Social Service Robot for Long-Term Autonomy in Open Environments
May 07, 2021
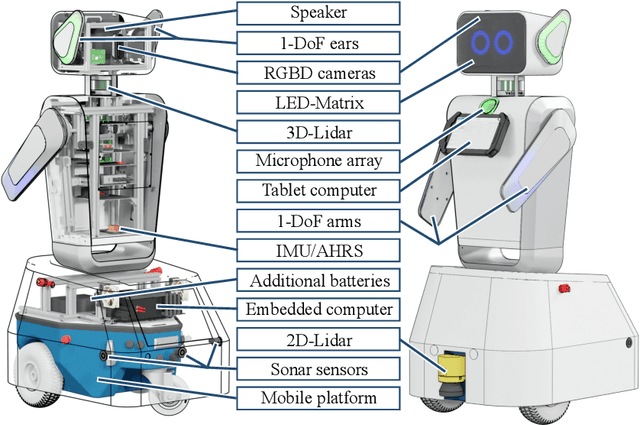

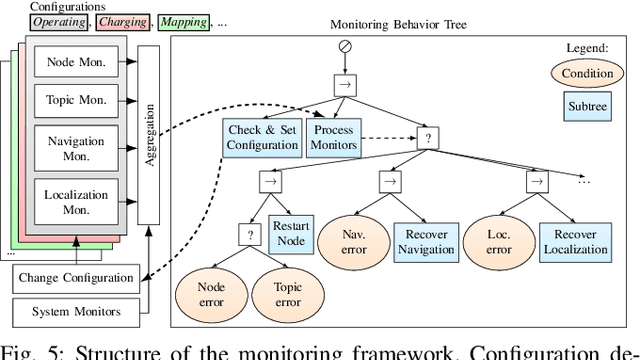
Long-term autonomy in service robotics is a current research topic, especially for dynamic, large-scale environments that change over time. We present Sobi, a mobile service robot developed as an interactive guide for open environments, such as public places with indoor and outdoor areas. The robot will serve as a platform for environmental modeling and human-robot interaction. Its main hardware and software components, which we freely license as a documented open source project, are presented. Another key focus is Sobi's monitoring system for long-term autonomy, which restores system components in a targeted manner in order to extend the total system lifetime without unplanned intervention. We demonstrate first results of the long-term autonomous capabilities in a 16-day indoor deployment, in which the robot patrols a total of 66.6 km with an average of 5.5 hours of travel time per weekday, charging autonomously in between. In a user study with 12 participants, we evaluate the appearance and usability of the user interface, which allows users to interactively query information about the environment and directions.
Behavior-Tree-Based Person Search for Symbiotic Autonomous Mobile Robot Tasks
Mar 16, 2021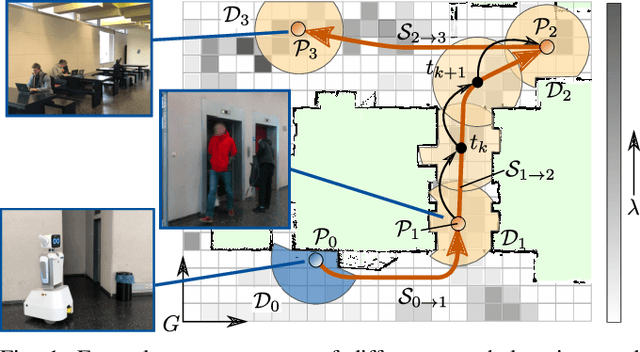
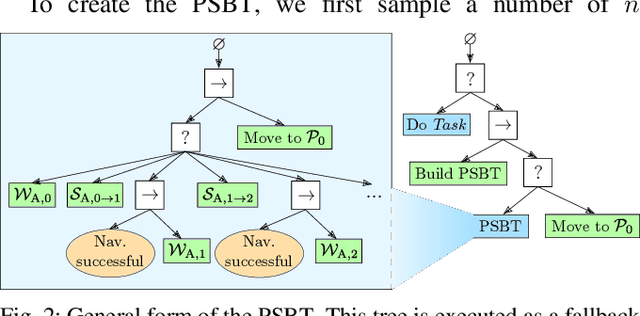
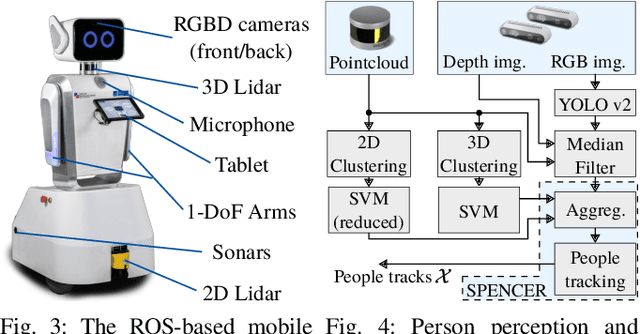
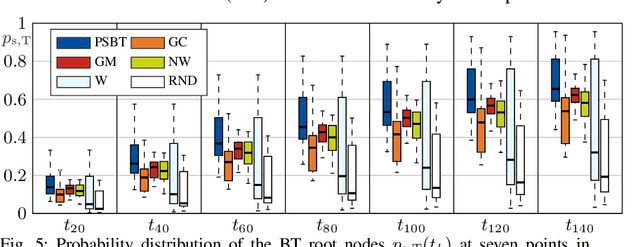
We consider the problem of people search by a mobile social robot in case of a situation that cannot be solved by the robot alone. Examples are physically opening a closed door or operating an elevator. Based on the Behavior Tree framework, we create a modular and easily extendable action sequence with the goal of finding a person to assist the robot. By decomposing the Behavior Tree as a Discrete Time Markov Chain, we obtain an estimate of the probability and rate of success of the options for action, especially where the robot should wait or search for people.In a real-world experiment, the presented method is compared with other common approaches in a total of 588 test runs over the course of one week, starting at two different locations in a university building. We show our method to be superior to other approaches in terms of success rate and duration until a finding person and returning to the start location.
Have I been here before? Learning to Close the Loop with LiDAR Data in Graph-Based SLAM
Mar 11, 2021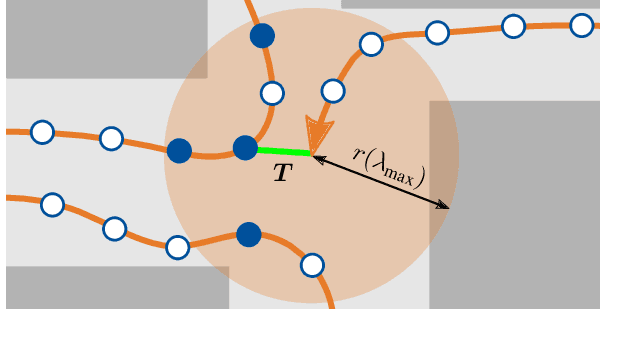
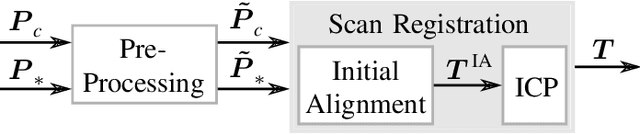
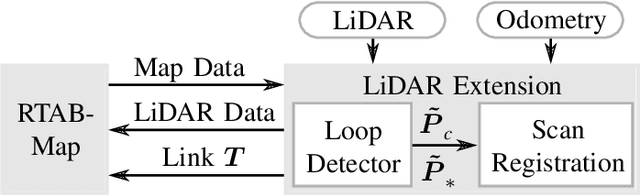
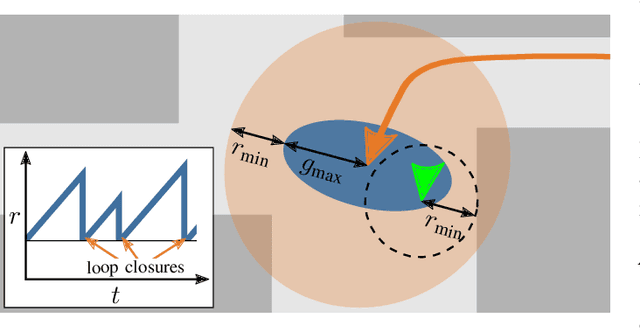
This work presents an extension of graph-based SLAM methods to exploit the potential of 3D laser scans for loop detection. Every high-dimensional point cloud is replaced by a compact global descriptor, whereby a trained detector decides whether a loop exists. Searching for loops is performed locally in a variable space to consider the odometry drift. Since closing a wrong loop has fatal consequences, an extensive verification is performed before acceptance. The proposed algorithm is implemented as an extension of the widely used state-of-the-art library RTAB-Map, and several experiments show the improvement: During SLAM with a mobile service robot in changing indoor and outdoor campus environments, our approach improves RTAB-Map regarding total number of closed loops. Especially in the presence of significant environmental changes, which typically lead to failure, localization becomes possible by our extension. Experiments with a car in traffic (KITTI benchmark) show the general applicability of our approach. These results are comparable to the state-of-the-art LiDAR method LOAM. The developed ROS package is freely available.