 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBehavior-Tree-Based Person Search for Symbiotic Autonomous Mobile Robot Tasks
Paper and Code
Mar 16, 2021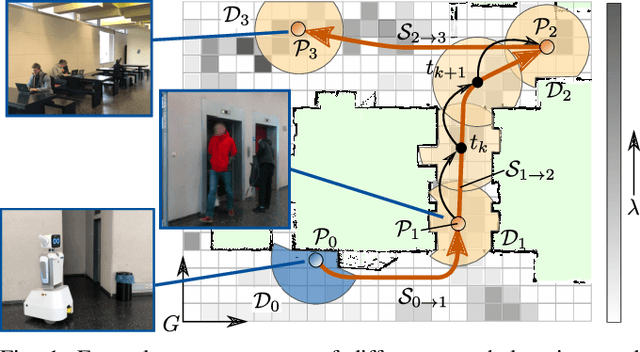
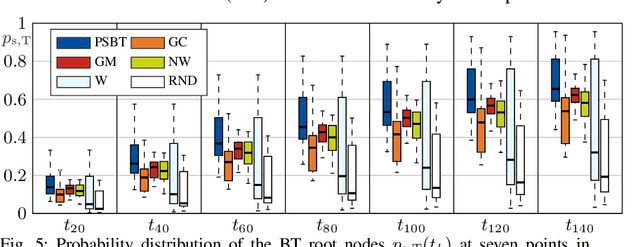
We consider the problem of people search by a mobile social robot in case of a situation that cannot be solved by the robot alone. Examples are physically opening a closed door or operating an elevator. Based on the Behavior Tree framework, we create a modular and easily extendable action sequence with the goal of finding a person to assist the robot. By decomposing the Behavior Tree as a Discrete Time Markov Chain, we obtain an estimate of the probability and rate of success of the options for action, especially where the robot should wait or search for people.In a real-world experiment, the presented method is compared with other common approaches in a total of 588 test runs over the course of one week, starting at two different locations in a university building. We show our method to be superior to other approaches in terms of success rate and duration until a finding person and returning to the start location.