 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-Parametric Modeling of Spatio-Temporal Human Activity Based on Mobile Robot Observations
Mar 14, 2022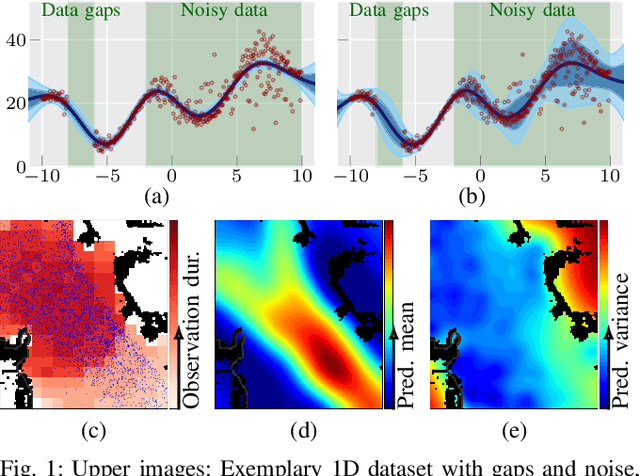
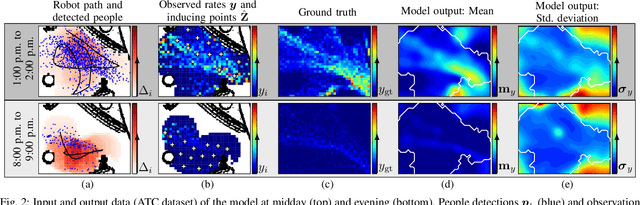
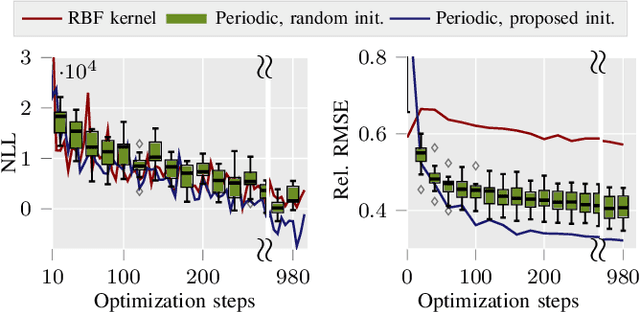
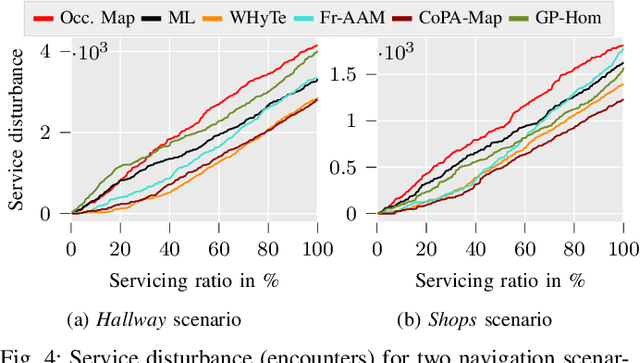
This work presents a non-parametric spatio-temporal model for mapping human activity by mobile autonomous robots in a long-term context. Based on Variational Gaussian Process Regression, the model incorporates prior information of spatial and temporal-periodic dependencies to create a continuous representation of human occurrences. The inhomogeneous data distribution resulting from movements of the robot is included in the model via a heteroscedastic likelihood function and can be accounted for as predictive uncertainty. Using a sparse formulation, data sets over multiple weeks and several hundred square meters can be used for model creation. The experimental evaluation, based on multi-week data sets, demonstrates that the proposed approach outperforms the state of the art both in terms of predictive quality and subsequent path planning.
Sobi: An Interactive Social Service Robot for Long-Term Autonomy in Open Environments
May 07, 2021
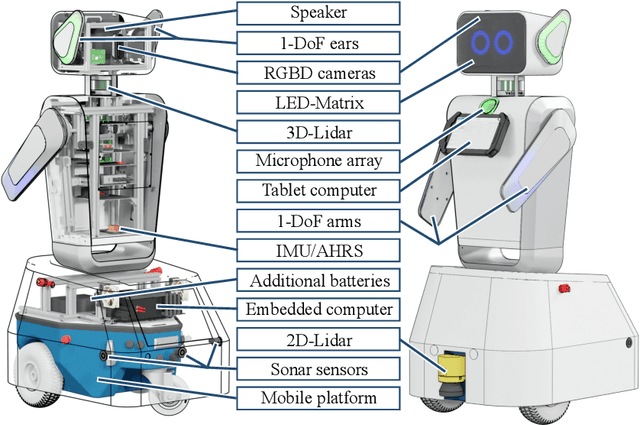

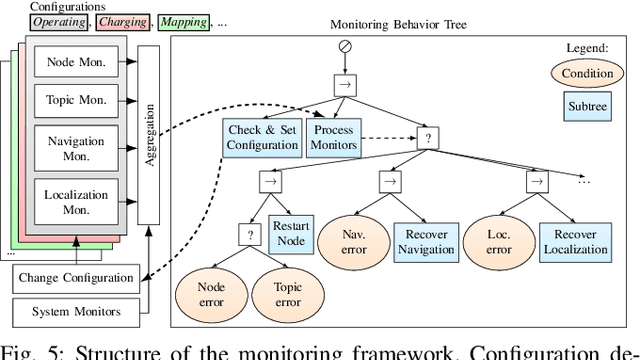
Long-term autonomy in service robotics is a current research topic, especially for dynamic, large-scale environments that change over time. We present Sobi, a mobile service robot developed as an interactive guide for open environments, such as public places with indoor and outdoor areas. The robot will serve as a platform for environmental modeling and human-robot interaction. Its main hardware and software components, which we freely license as a documented open source project, are presented. Another key focus is Sobi's monitoring system for long-term autonomy, which restores system components in a targeted manner in order to extend the total system lifetime without unplanned intervention. We demonstrate first results of the long-term autonomous capabilities in a 16-day indoor deployment, in which the robot patrols a total of 66.6 km with an average of 5.5 hours of travel time per weekday, charging autonomously in between. In a user study with 12 participants, we evaluate the appearance and usability of the user interface, which allows users to interactively query information about the environment and directions.
Behavior-Tree-Based Person Search for Symbiotic Autonomous Mobile Robot Tasks
Mar 16, 2021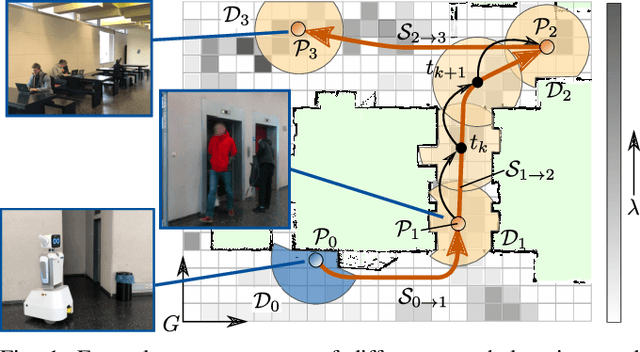
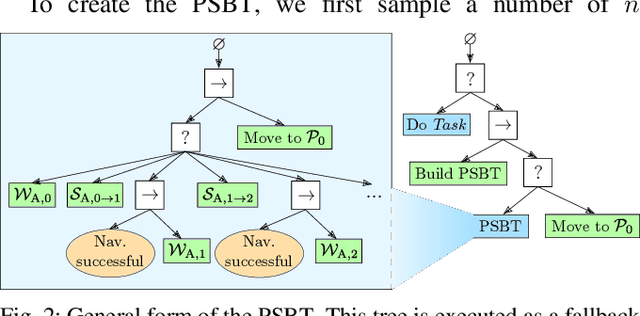
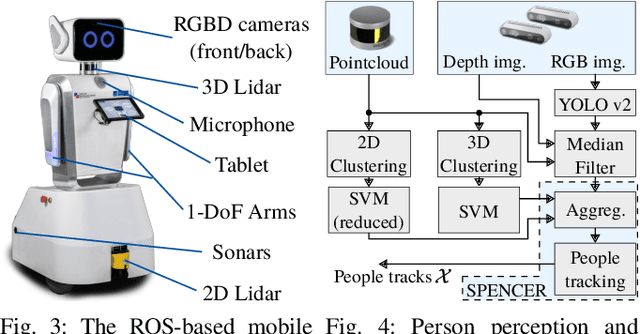
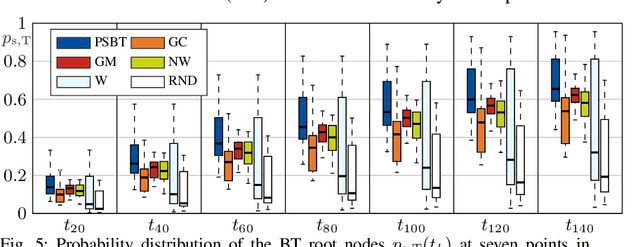
We consider the problem of people search by a mobile social robot in case of a situation that cannot be solved by the robot alone. Examples are physically opening a closed door or operating an elevator. Based on the Behavior Tree framework, we create a modular and easily extendable action sequence with the goal of finding a person to assist the robot. By decomposing the Behavior Tree as a Discrete Time Markov Chain, we obtain an estimate of the probability and rate of success of the options for action, especially where the robot should wait or search for people.In a real-world experiment, the presented method is compared with other common approaches in a total of 588 test runs over the course of one week, starting at two different locations in a university building. We show our method to be superior to other approaches in terms of success rate and duration until a finding person and returning to the start location.
Have I been here before? Learning to Close the Loop with LiDAR Data in Graph-Based SLAM
Mar 11, 2021
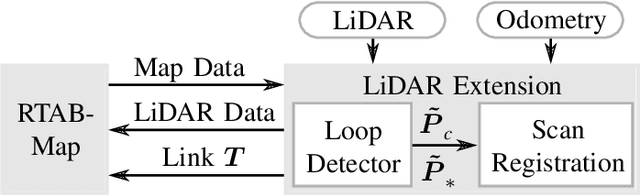
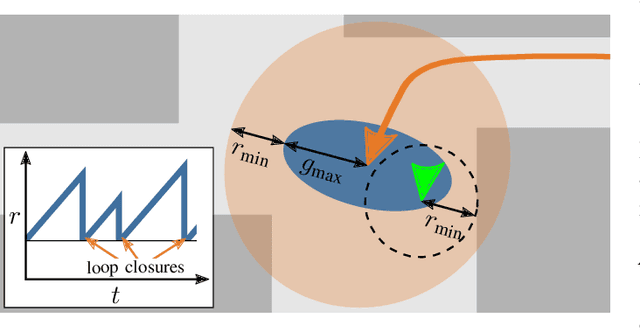
This work presents an extension of graph-based SLAM methods to exploit the potential of 3D laser scans for loop detection. Every high-dimensional point cloud is replaced by a compact global descriptor, whereby a trained detector decides whether a loop exists. Searching for loops is performed locally in a variable space to consider the odometry drift. Since closing a wrong loop has fatal consequences, an extensive verification is performed before acceptance. The proposed algorithm is implemented as an extension of the widely used state-of-the-art library RTAB-Map, and several experiments show the improvement: During SLAM with a mobile service robot in changing indoor and outdoor campus environments, our approach improves RTAB-Map regarding total number of closed loops. Especially in the presence of significant environmental changes, which typically lead to failure, localization becomes possible by our extension. Experiments with a car in traffic (KITTI benchmark) show the general applicability of our approach. These results are comparable to the state-of-the-art LiDAR method LOAM. The developed ROS package is freely available.