 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHave I been here before? Learning to Close the Loop with LiDAR Data in Graph-Based SLAM
Paper and Code
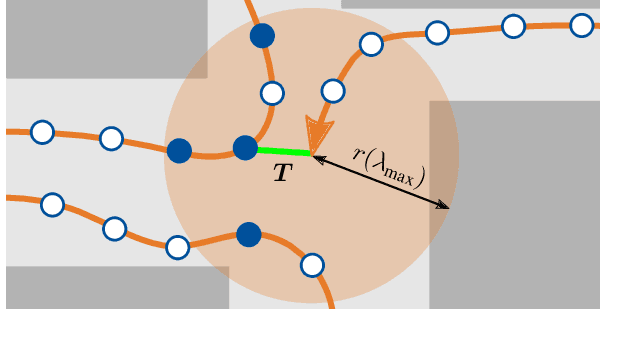
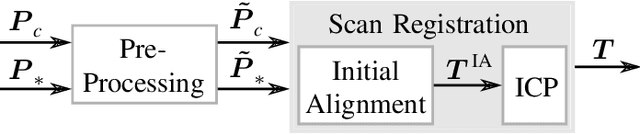
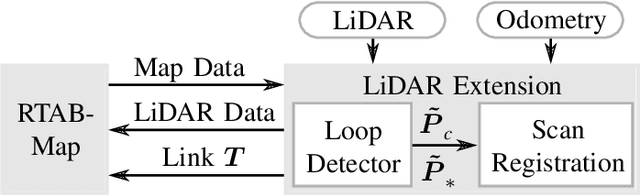
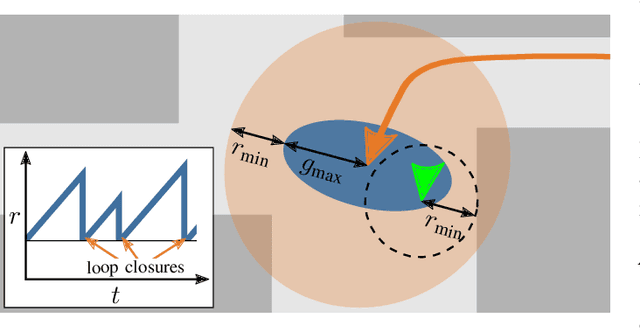
This work presents an extension of graph-based SLAM methods to exploit the potential of 3D laser scans for loop detection. Every high-dimensional point cloud is replaced by a compact global descriptor, whereby a trained detector decides whether a loop exists. Searching for loops is performed locally in a variable space to consider the odometry drift. Since closing a wrong loop has fatal consequences, an extensive verification is performed before acceptance. The proposed algorithm is implemented as an extension of the widely used state-of-the-art library RTAB-Map, and several experiments show the improvement: During SLAM with a mobile service robot in changing indoor and outdoor campus environments, our approach improves RTAB-Map regarding total number of closed loops. Especially in the presence of significant environmental changes, which typically lead to failure, localization becomes possible by our extension. Experiments with a car in traffic (KITTI benchmark) show the general applicability of our approach. These results are comparable to the state-of-the-art LiDAR method LOAM. The developed ROS package is freely available.