 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneralizable and Fast Surrogates: Model Predictive Control of Articulated Soft Robots using Physics-Informed Neural Networks
Feb 04, 2025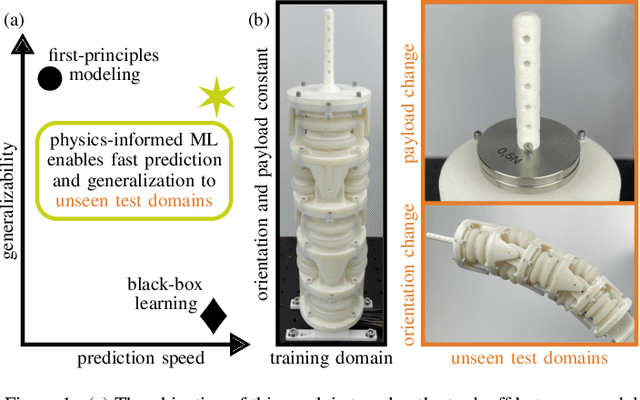
Soft robots can revolutionize several applications with high demands on dexterity and safety. When operating these systems, real-time estimation and control require fast and accurate models. However, prediction with first-principles (FP) models is slow, and learned black-box models have poor generalizability. Physics-informed machine learning offers excellent advantages here, but it is currently limited to simple, often simulated systems without considering changes after training. We propose physics-informed neural networks (PINNs) for articulated soft robots (ASRs) with a focus on data efficiency. The amount of expensive real-world training data is reduced to a minimum - one dataset in one system domain. Two hours of data in different domains are used for a comparison against two gold-standard approaches: In contrast to a recurrent neural network, the PINN provides a high generalizability. The prediction speed of an accurate FP model is improved with the PINN by up to a factor of 466 at slightly reduced accuracy. This enables nonlinear model predictive control (MPC) of the pneumatic ASR. In nine dynamic MPC experiments, an average joint-tracking error of 1.3{\deg} is achieved.