 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Contact Detection via Fusion of Joint and Inertial Sensors for Parallel Robots in Human-Robot Collaboration
May 13, 2025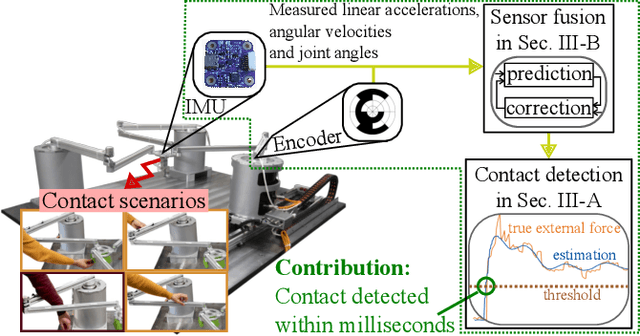
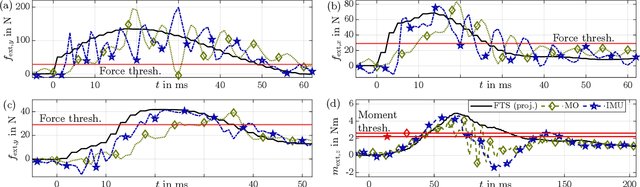
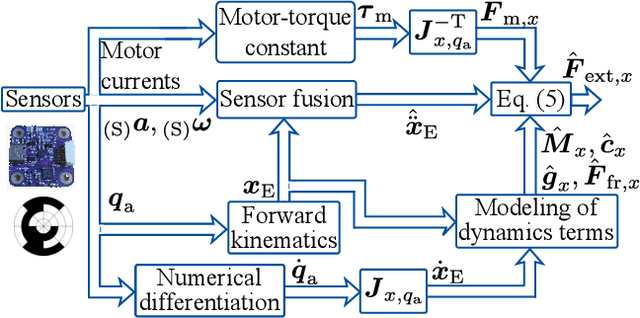
Fast contact detection is crucial for safe human-robot collaboration. Observers based on proprioceptive information can be used for contact detection but have first-order error dynamics, which results in delays. Sensor fusion based on inertial measurement units (IMUs) consisting of accelerometers and gyroscopes is advantageous for reducing delays. The acceleration estimation enables the direct calculation of external forces. For serial robots, the installation of multiple accelerometers and gyroscopes is required for dynamics modeling since the joint coordinates are the minimal coordinates. Alternatively, parallel robots (PRs) offer the potential to use only one IMU on the end-effector platform, which already presents the minimal coordinates of the PR. This work introduces a sensor-fusion method for contact detection using encoders and only one low-cost, consumer-grade IMU for a PR. The end-effector accelerations are estimated by an extended Kalman filter and incorporated into the dynamics to calculate external forces. In real-world experiments with a planar PR, we demonstrate that this approach reduces the detection duration by up to 50% compared to a momentum observer and enables the collision and clamping detection within 3-39ms.
SPONGE: Open-Source Designs of Modular Articulated Soft Robots
Apr 16, 2024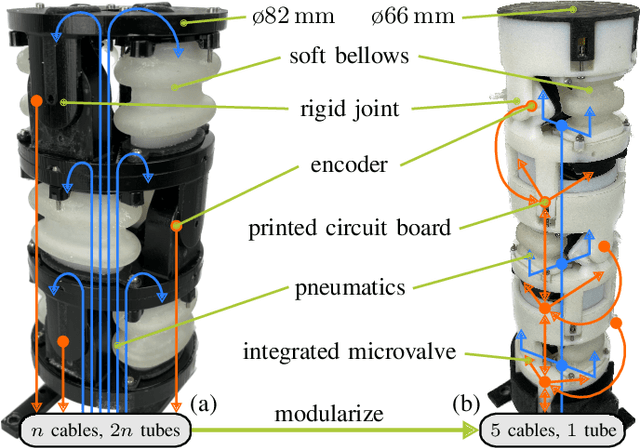
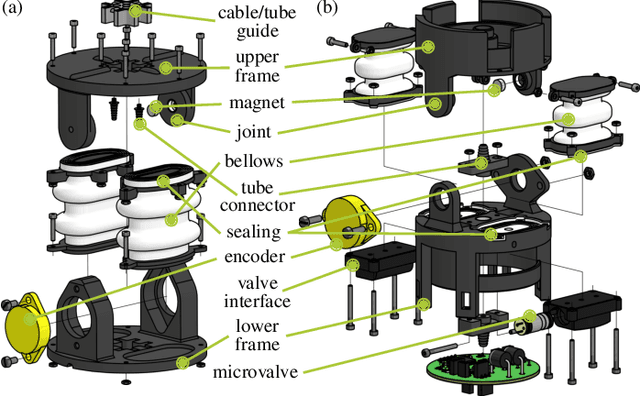
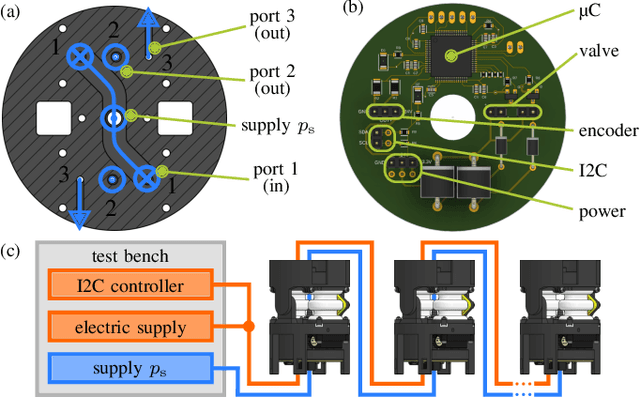
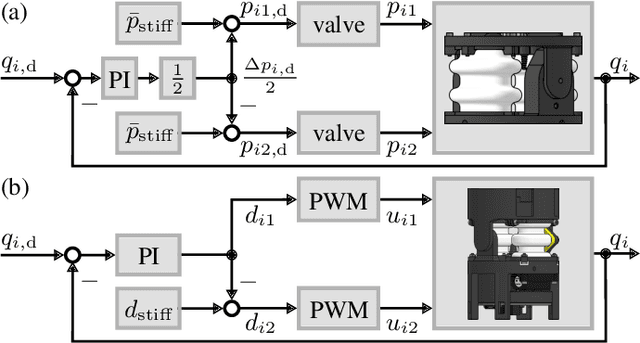
Soft-robot designs are manifold, but only a few are publicly available. Often, these are only briefly described in their publications. This complicates reproduction, and hinders the reproducibility and comparability of research results. If the designs were uniform and open source, validating researched methods on real benchmark systems would be possible. To address this, we present two variants of a soft pneumatic robot with antagonistic bellows as open source. Starting from a semi-modular design with multiple cables and tubes routed through the robot body, the transition to a fully modular robot with integrated microvalves and serial communication is highlighted. Modularity in terms of stackability, actuation, and communication is achieved, which is the crucial requirement for building soft robots with many degrees of freedom and high dexterity for real-world tasks. Both systems are compared regarding their respective advantages and disadvantages. The robots' functionality is demonstrated in experiments on airtightness, gravitational influence, position control with mean tracking errors of <3 deg, and long-term operation of cast and printed bellows. All soft- and hardware files required for reproduction are provided.
Collective Iterative Learning Control: Exploiting Diversity in Multi-Agent Systems for Reference Tracking Tasks
Apr 15, 2021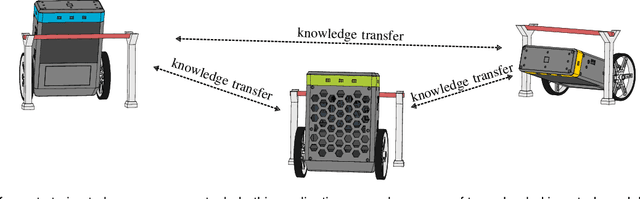

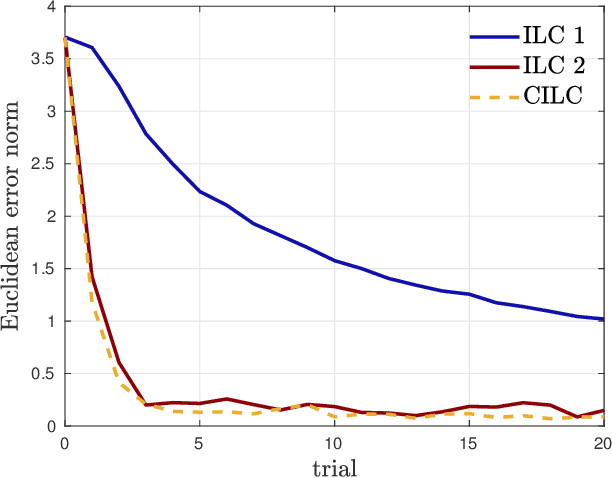
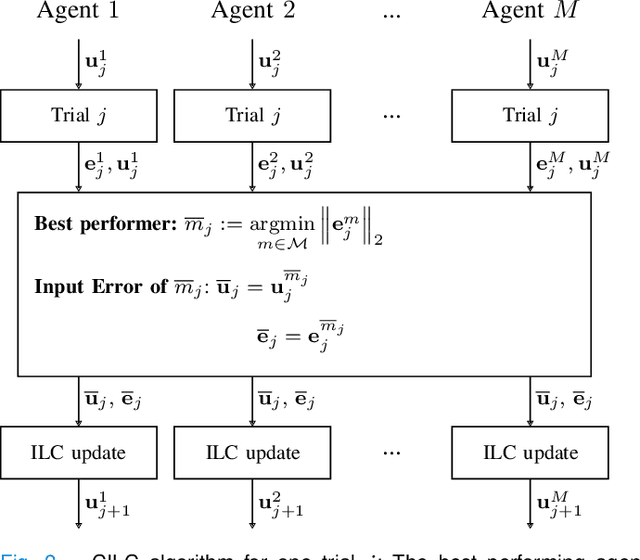
This paper considers a group of autonomous agents learning to track the same given reference trajectory in a possibly small number of trials. We propose a novel collective learning control method (namely, CILC) that combines Iterative Learning Control (ILC) with a collective input update strategy. We derive conditions for desirable convergence properties of such systems. We show that the proposed method allows the collective to combine the advantages of the agents' individual learning strategies and thereby overcomes trade-offs and limitations of single-agent ILC. This benefit is leveraged by designing a heterogeneous collective, i.e., a different learning law is assigned to each agent. All theoretical results are confirmed in simulations and experiments with two-wheeled-inverted-pendulums robots (TWIPRs) that jointly learn to perform a desired maneuver.
Magnetometer-free inertial motion tracking of arbitrary joints with range of motion constraints
Feb 03, 2020



In motion tracking of connected multi-body systems Inertial Measurement Units (IMUs) are used in a wide variety of applications, since they provide a low-cost easy-to-use method for orientation estimation. However, in indoor environments or near ferromagnetic material the magnetic field is inhomogeneous which limits the accuracy of tracking algorithms using magnetometers. Methods that use only accelerometers and gyroscopes on the other hand yield no information on the absolute heading of the tracked object. For objects connected by rotational joints with range of motion constraints we propose a method that provides a magnetometer-free, long-term stable relative orientation estimate based on a non-linear, window-based cost function. The method can be used for real-time estimation as well as post-processing. It is validated experimentally with a mechanical joint and compared to other methods that are used in motion tracking. It is shown that for the used test object, the proposed methods yields the best results with a total angle error of less than 4 degrees for all experiments.
Joint axis estimation for fast and slow movements using weighted gyroscope and acceleration constraints
Mar 18, 2019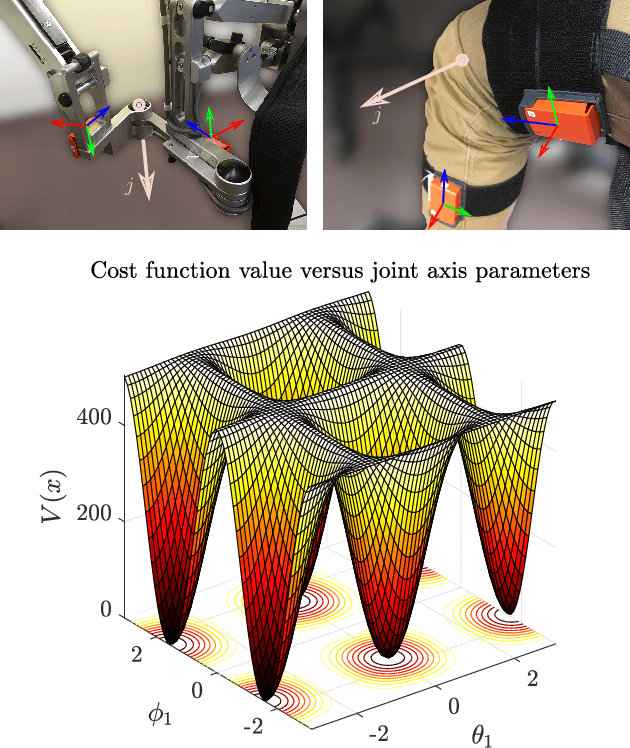


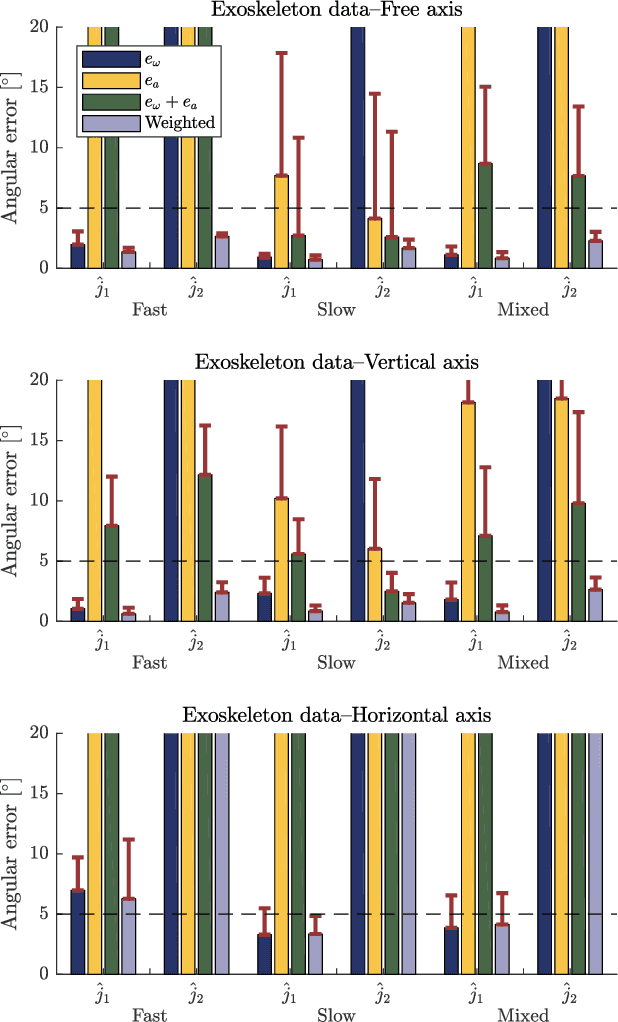
Sensor-to-segment calibration is a crucial step in inertial motion tracking. When two segments are connected by a hinge joint, for example in human knee and finger joints as well as in many robotic limbs, then the joint axis vector must be identified in the intrinsic sensor coordinate systems. There exist methods that identify these coordinates by solving an optimization problem that is based on kinematic joint constraints, which involve either the measured accelerations or the measured angular rates. In the current paper we demonstrate that using only one of these constraints leads to inaccurate estimates at either fast or slow motions. We propose a novel method based on a cost function that combines both constraints. The restrictive assumption of a homogeneous magnetic field is avoided by using only accelerometer and gyroscope readings. To combine the advantages of both sensor types, the residual weights are adjusted automatically based on the estimated signal variances and a nonlinear weighting of the acceleration norm difference. The method is evaluated using real data from nine different motions of an upper limb exoskeleton. Results show that, unlike previous approaches, the proposed method yields accurate joint axis estimation after only five seconds for all fast and slow motions.