 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPONGE: Open-Source Designs of Modular Articulated Soft Robots
Paper and Code
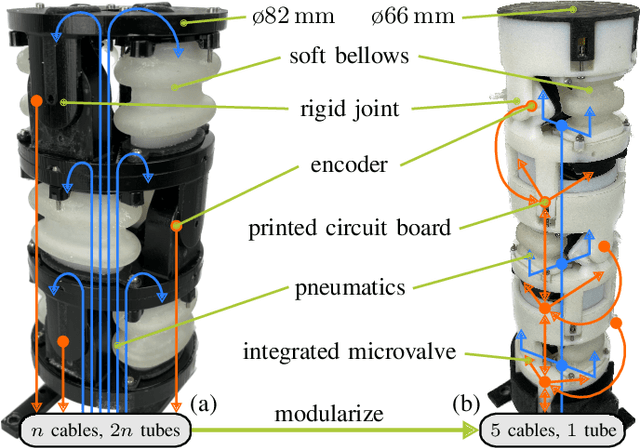
Soft-robot designs are manifold, but only a few are publicly available. Often, these are only briefly described in their publications. This complicates reproduction, and hinders the reproducibility and comparability of research results. If the designs were uniform and open source, validating researched methods on real benchmark systems would be possible. To address this, we present two variants of a soft pneumatic robot with antagonistic bellows as open source. Starting from a semi-modular design with multiple cables and tubes routed through the robot body, the transition to a fully modular robot with integrated microvalves and serial communication is highlighted. Modularity in terms of stackability, actuation, and communication is achieved, which is the crucial requirement for building soft robots with many degrees of freedom and high dexterity for real-world tasks. Both systems are compared regarding their respective advantages and disadvantages. The robots' functionality is demonstrated in experiments on airtightness, gravitational influence, position control with mean tracking errors of <3 deg, and long-term operation of cast and printed bellows. All soft- and hardware files required for reproduction are provided.