 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhase Distribution in Probabilistic Movement Primitives, Representing Time Variability for the Recognition and Reproduction of Human Movements
Nov 15, 2022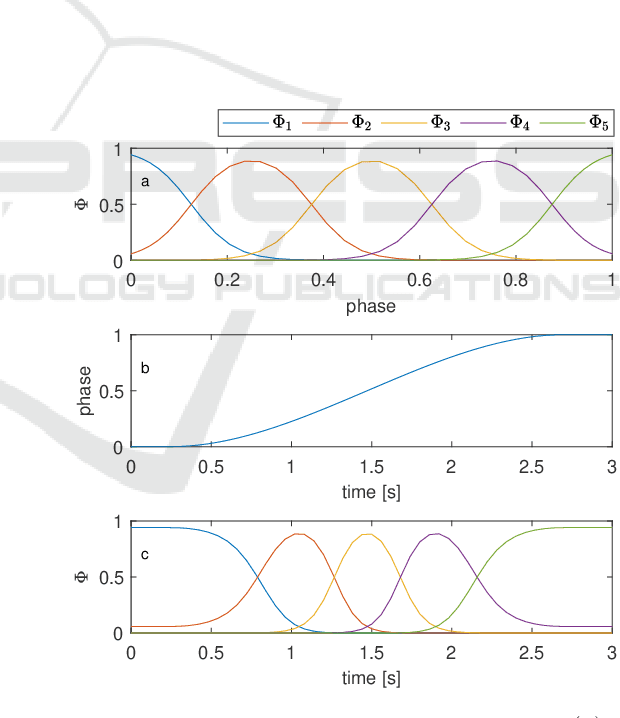
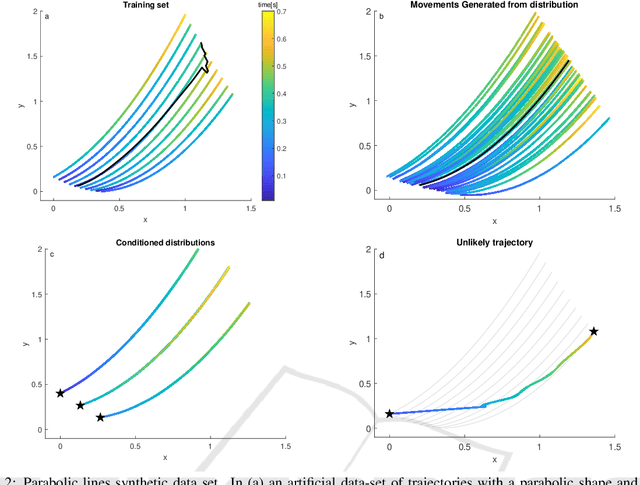
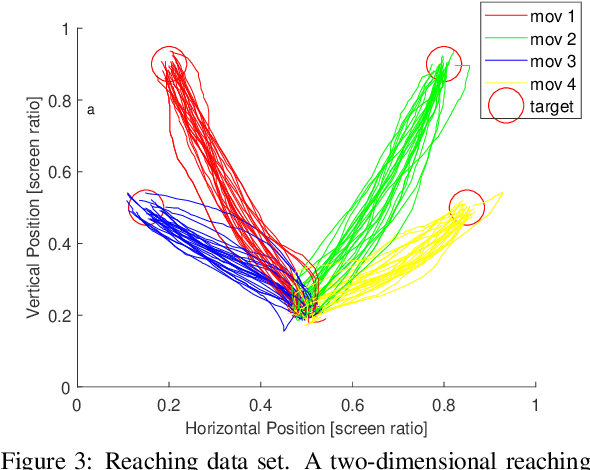
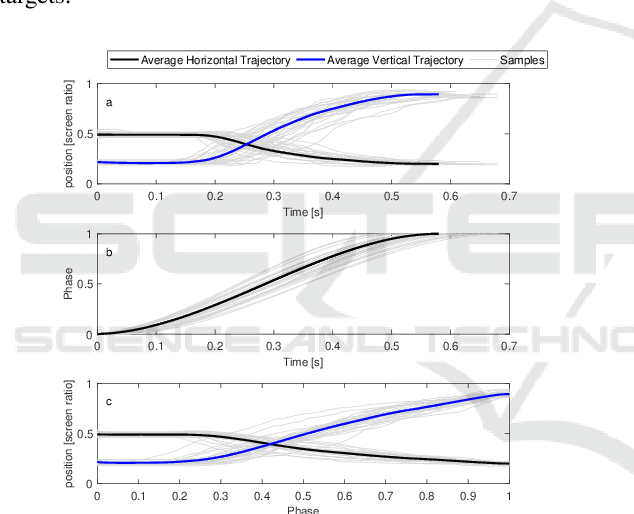
Probabilistic Movement Primitives (ProMPs) are a widely used representation of movements for human-robot interaction. They also facilitate the factorization of temporal and spatial structure of movements. In this work we investigate a method to temporally align observations so that when learning ProMPs, information in the spatial structure of the observed motion is maximized while maintaining a smooth phase velocity. We apply the method on recordings of hand trajectories in a two-dimensional reaching task. A system for simultaneous recognition of movement and phase is proposed and performance of movement recognition and movement reproduction is discussed.
Magnetometer-free inertial motion tracking of arbitrary joints with range of motion constraints
Feb 03, 2020



In motion tracking of connected multi-body systems Inertial Measurement Units (IMUs) are used in a wide variety of applications, since they provide a low-cost easy-to-use method for orientation estimation. However, in indoor environments or near ferromagnetic material the magnetic field is inhomogeneous which limits the accuracy of tracking algorithms using magnetometers. Methods that use only accelerometers and gyroscopes on the other hand yield no information on the absolute heading of the tracked object. For objects connected by rotational joints with range of motion constraints we propose a method that provides a magnetometer-free, long-term stable relative orientation estimate based on a non-linear, window-based cost function. The method can be used for real-time estimation as well as post-processing. It is validated experimentally with a mechanical joint and compared to other methods that are used in motion tracking. It is shown that for the used test object, the proposed methods yields the best results with a total angle error of less than 4 degrees for all experiments.
Timely Negotiation and Correction of Shared Intentions With Body Motion
Jan 16, 2019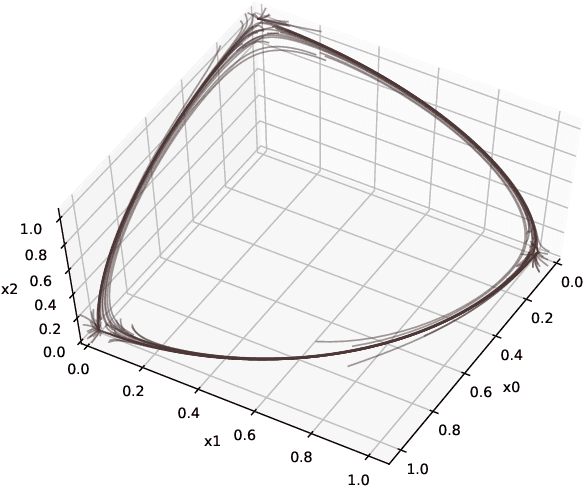
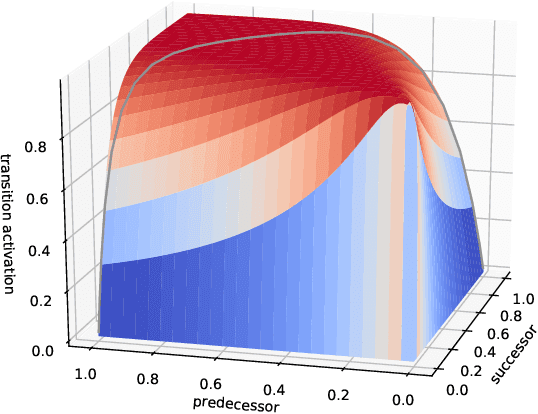
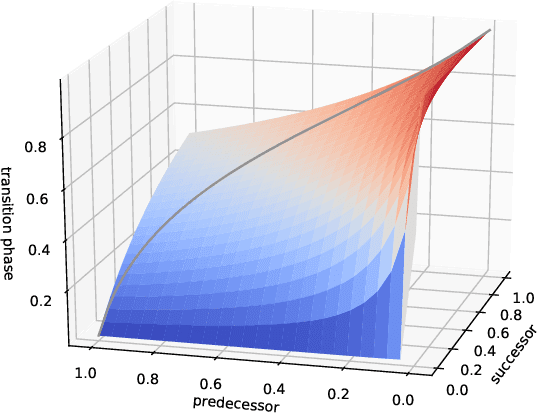
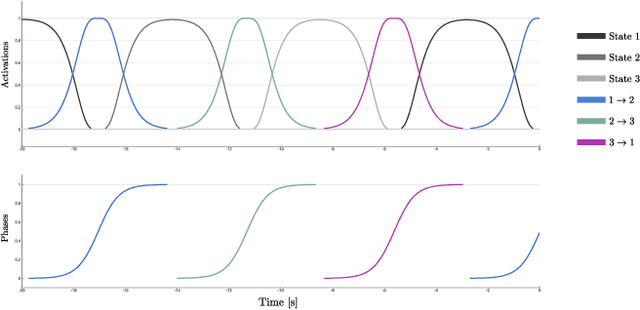
Current robot architectures for modeling interaction behavior are not well suited to the dual task of sequencing discrete actions and incorporating information instantly. Additionally, for communication based on body motion, actions also serve as cues for negotiating interaction alternatives and to enable timely interventions. The paper presents a dynamical system based on the stable heteroclinic channel network, which provides a rich set of parameters to isntantly modulate motions, while maintaining a compact state graph abstraction suitable for reasoning, planning and inference.