 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStatistical Tools for Frequency Response Functions from Posture Control Experiments: Estimation of Probability of a Sample and Comparison Between Groups of Unpaired Samples
Jan 28, 2025The frequency response function (FRF) is an established way to describe the outcome of experiments in posture control literature. The FRF is an empirical transfer function between an input stimulus and the induced body segment sway profile, represented as a vector of complex values associated with a vector of frequencies. Having obtained an FRF from a trial with a subject, it can be useful to quantify the likelihood it belongs to a certain population, e.g., to diagnose a condition or to evaluate the human likeliness of a humanoid robot or a wearable device. In this work, a recently proposed method for FRF statistics based on confidence bands computed with bootstrap will be summarized, and, on its basis, possible ways to quantify the likelihood of FRFs belonging to a given set will be proposed. Furthermore, a statistical test to compare groups of unpaired samples is presented.
User-centered evaluation of the Wearable Walker lower limb exoskeleton, preliminary assessment based on the Experience protocol
Aug 16, 2024



Using lower-limbs exoskeletons provides potential advantages in terms of productivity and safety associated with reduced stress. However, complex issues in human-robot interaction are still open, such as the physiological effects of exoskeletons and the impact on the user's subjective experience. In this work, an innovative exoskeleton, the Wearable Walker, is assessed using the EXPERIENCE benchmarking protocol from the EUROBENCH project. The Wearable Walker is a lower-limb exoskeleton that enhances human abilities, such as carrying loads. The device uses a unique control approach called Blend Control that provides smooth assistance torques. It operates two models simultaneously, one in the case in which the left foot is grounded and another for the grounded right foot. These models generate assistive torques combined to provide continuous and smooth overall assistance, preventing any abrupt changes in torque due to model switching. The EXPERIENCE protocol consists of walking on flat ground while gathering physiological signals such as heart rate, its variability, respiration rate, and galvanic skin response and completing a questionnaire. The test was performed with five healthy subjects. The scope of the present study is twofold: to evaluate the specific exoskeleton and its current control system to gain insight into possible improvements and to present a case study for a formal and replicable benchmarking of wearable robots.
Phase Distribution in Probabilistic Movement Primitives, Representing Time Variability for the Recognition and Reproduction of Human Movements
Nov 15, 2022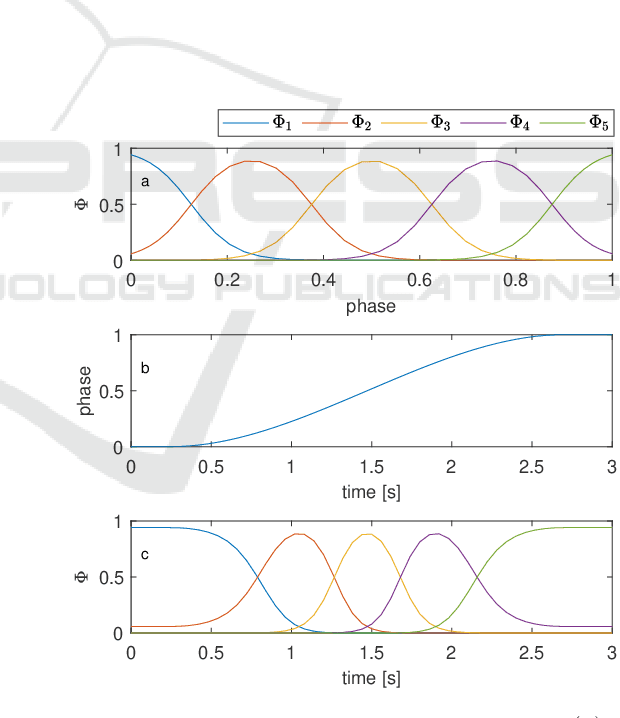
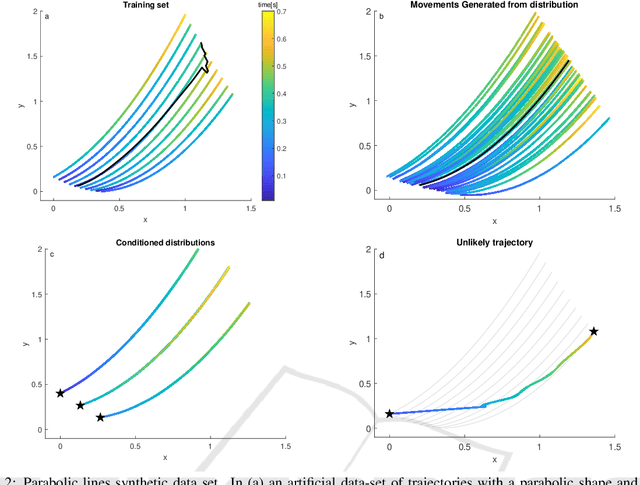
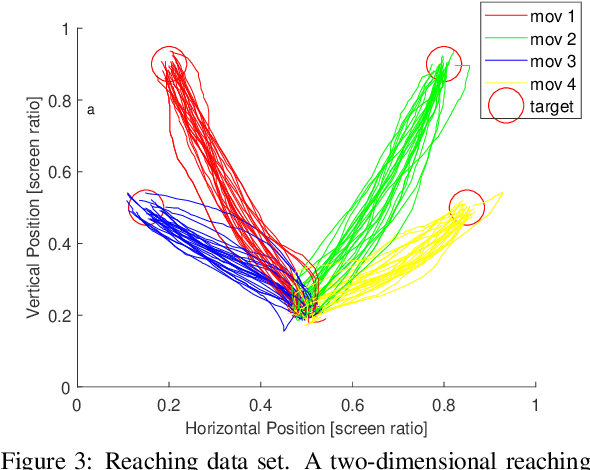
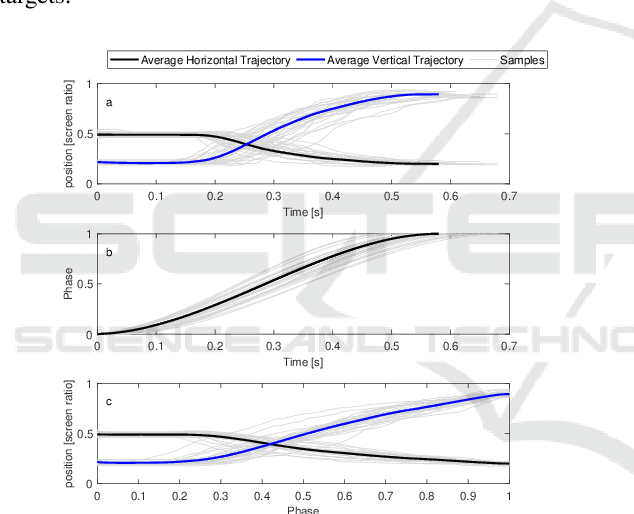
Probabilistic Movement Primitives (ProMPs) are a widely used representation of movements for human-robot interaction. They also facilitate the factorization of temporal and spatial structure of movements. In this work we investigate a method to temporally align observations so that when learning ProMPs, information in the spatial structure of the observed motion is maximized while maintaining a smooth phase velocity. We apply the method on recordings of hand trajectories in a two-dimensional reaching task. A system for simultaneous recognition of movement and phase is proposed and performance of movement recognition and movement reproduction is discussed.
Human-Likeness Indicator for Robot Posture Control and Balance
Oct 27, 2022Similarly to humans, humanoid robots require posture control and balance to walk and interact with the environment. In this work posture control in perturbed conditions is evaluated as a performance test for humanoid control. A specific performance indicator is proposed: the score is based on the comparison between the body sway of the tested humanoid standing on a moving surface and the sway produced by healthy subjects performing the same experiment. This approach is here oriented to the evaluation of a human-likeness. The measure is tested using a humanoid robot in order to demonstrate a typical usage of the proposed evaluation scheme and an example of how to improve robot control on the basis of such a performance indicator score
* 16 pages, 5 Figures. arXiv admin note: substantial text overlap with arXiv:2110.14395
EXOSMOOTH: Test of Innovative EXOskeleton Control for SMOOTH Assistance, With and Without Ankle Actuation
Mar 08, 2022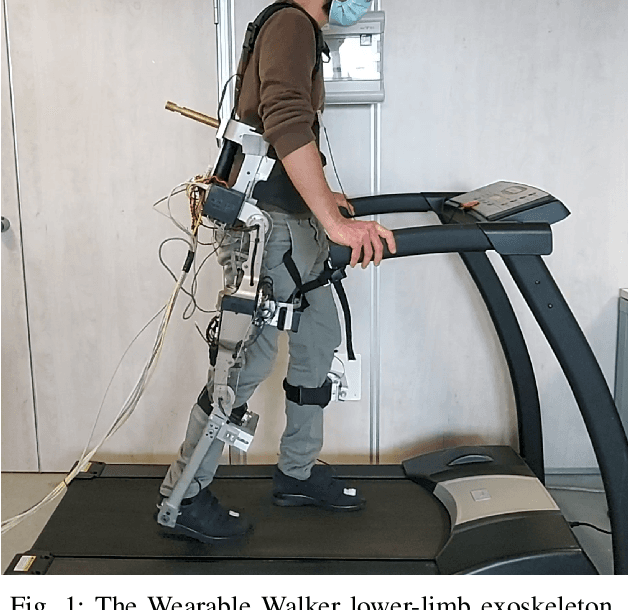
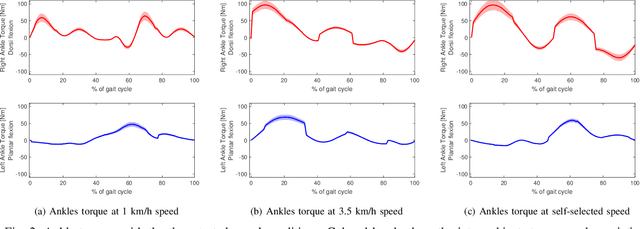

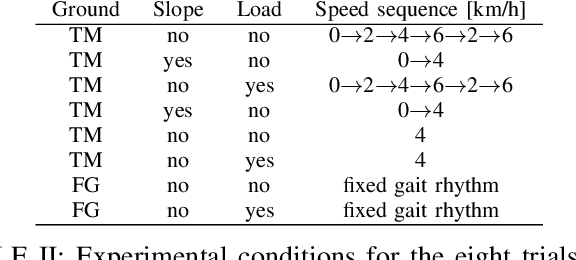
This work presents a description of the EXOSMOOTH project, oriented to the benchmarking of lower limb exoskeletons performance. In the field of assisted walking by powered lower limb exoskeletons, the EXOSMOOTH project proposes an experiment that targets two scientific questions. The first question is related to the effectiveness of a novel control strategy for smooth assistance. Current assist strategies are based on controllers that switch the assistance level based on the gait segmentation provided by a finite state machine. The proposed strategy aims at managing phase transitions to provide a smoother assistance to the user, thus increasing the device transparency and comfort for the user. The second question is the role of the actuation at the ankle joint in assisted walking. Many novel exoskeletons devised for industrial applications do not feature an actuated ankle joint. In the EXOSMOOTH project, the ankle joint actuation will be one experimental factor to have a direct assessment of the role of an actuated joint in assisted walking. Preliminary results of 15 healthy subjects walking at different speeds while wearing a lower limb exoskeleton supported the rationale behind this question: having an actuated ankle joint could potentially reduce the torques applied by the user by a maximum value of 85 Nm. The two aforementioned questions will be investigated in a protocol that includes walking on a treadmill and on flat ground, with or without slope, and with a load applied on the back. In addition, the interaction forces measured at the exoskeleton harnesses will be used to assess the comfort of the user and the effectiveness of the control strategy to improve transparency.
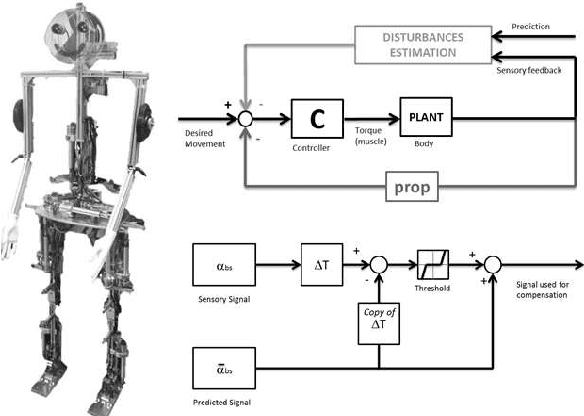
A Bio-inspired Modular System for Humanoid Posture Control
Dec 04, 2021


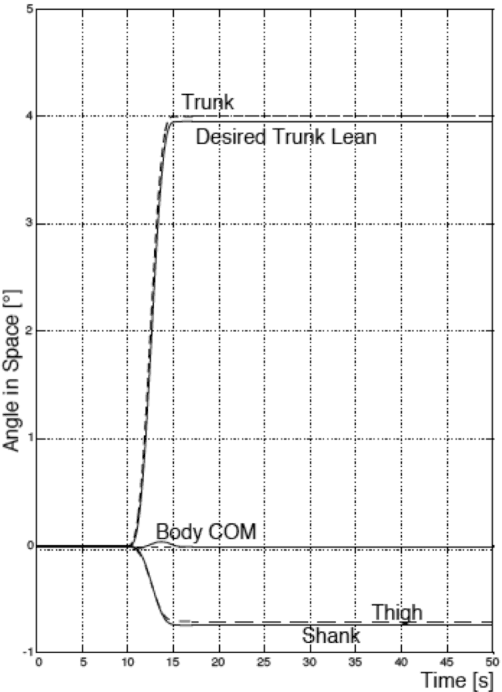
Bio-inspired sensorimotor control systems may be appealing to roboticists who try to solve problems of multiDOF humanoids and human-robot interactions. This paper presents a simple posture control concept from neuroscience, called disturbance estimation and compensation, DEC concept [1]. It provides human-like mechanical compliance due to low loop gain, tolerance of time delays, and automatic adjustment to changes in external disturbance scenarios. Its outstanding feature is that it uses feedback of multisensory disturbance estimates rather than 'raw' sensory signals for disturbance compensation. After proof-of-principle tests in 1 and 2 DOF posture control robots, we present here a generalized DEC control module for multi-DOF robots. In the control layout, one DEC module controls one DOF (modular control architecture). Modules of neighboring joints are synergistically interconnected using vestibular information in combination with joint angle and torque signals. These sensory interconnections allow each module to control the kinematics of the more distal links as if they were a single link. This modular design makes the complexity of the robot control scale linearly with the DOFs and error robustness high compared to monolithic control architectures. The presented concept uses Matlab/Simulink (The MathWorks, Natick, USA) for both, model simulation and robot control and will be available as open library
Evaluating Robot Posture Control and Balance by Comparison to Human Subjects using Human Likeness Measures
Oct 27, 2021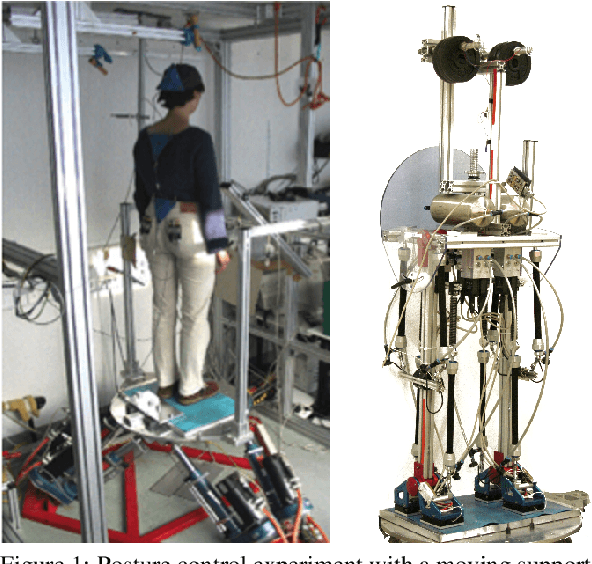

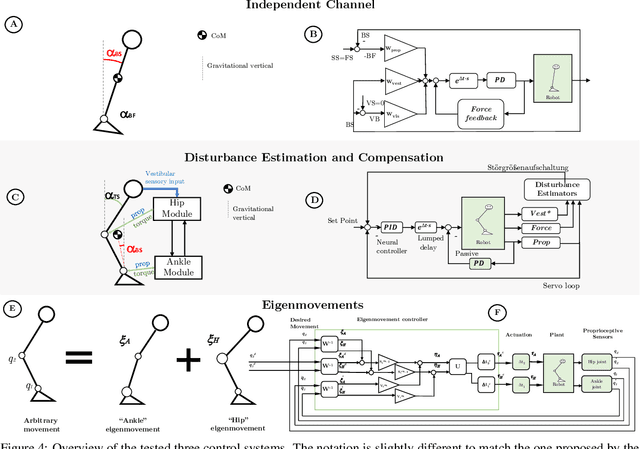
Posture control and balance are basic requirements for a humanoid robot performing motor tasks like walking and interacting with the environment. For this reason, posture control is one of the elements taken into account when evaluating the performance of humanoids. In this work, we describe and analyze a performance indicator based on the comparison between the body sway of a robot standing on a moving surface and the one of healthy subjects performing the same experiment. This approach is here oriented to the evaluation of human likeness. The measure is tested with three human-inspired humanoid posture control systems, the independent channel (IC), the disturbance identification and compensation (DEC), and the eigenmovement (EM) control. The potential and the limitations connected with such human-inspired humanoid control mechanisms are then discussed.
Identification of Gait Phases with Neural Networks for Smooth Transparent Control of a Lower Limb Exoskeleton
Jul 08, 2021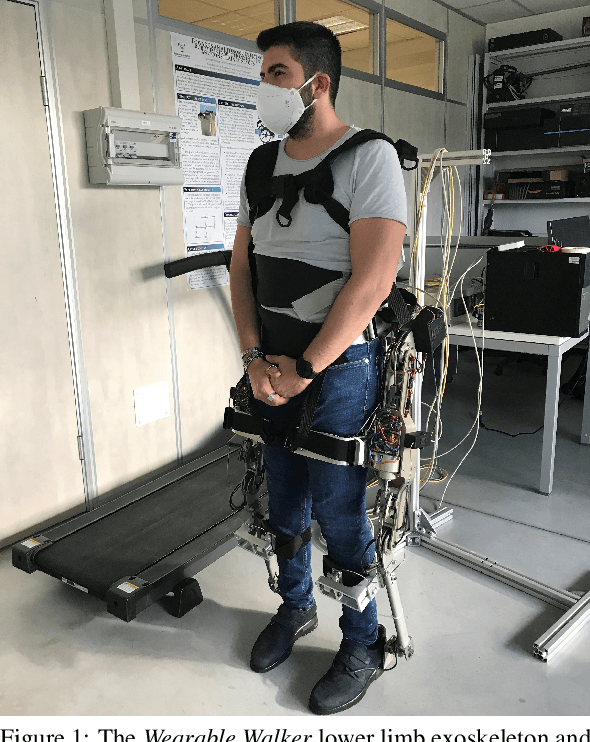
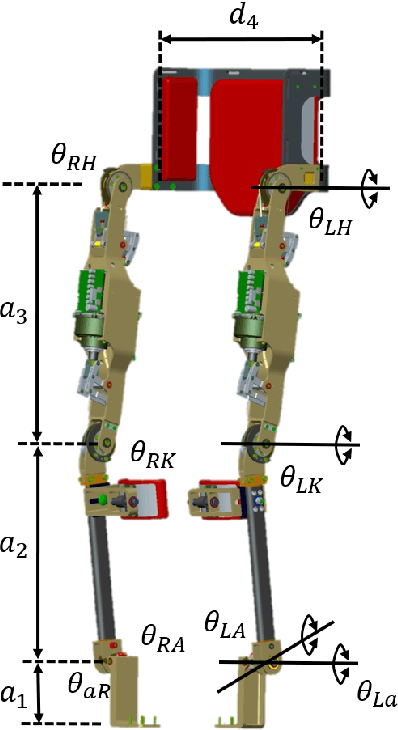
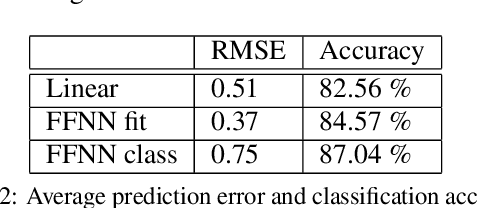
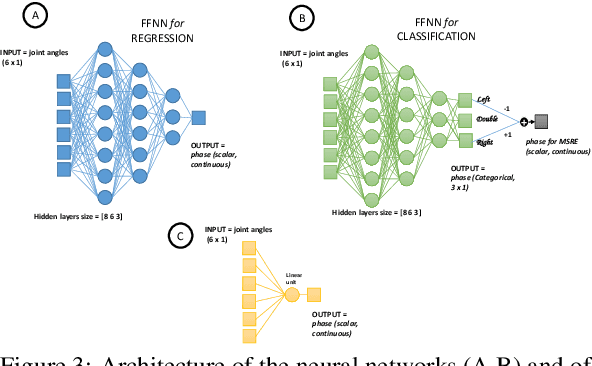
Lower limbs exoskeletons provide assistance during standing, squatting, and walking. Gait dynamics, in particular, implies a change in the configuration of the device in terms of contact points, actuation, and system dynamics in general. In order to provide a comfortable experience and maximize performance, the exoskeleton should be controlled smoothly and in a transparent way, which means respectively, minimizing the interaction forces with the user and jerky behavior due to transitions between different configurations. A previous study showed that a smooth control of the exoskeleton can be achieved using a gait phase segmentation based on joint kinematics. Such a segmentation system can be implemented as linear regression and should be personalized for the user after a calibration procedure. In this work, a nonlinear segmentation function based on neural networks is implemented and compared with linear regression. An on-line implementation is then proposed and tested with a subject.
COMTEST Project: A Complete Modular Test Stand for Human and Humanoid Posture Control and Balance
Apr 24, 2021



This work presents a system to benchmark humanoid posture control and balance performances under perturbed conditions. The specific benchmarking scenario consists, for example, of balancing upright stance while performing voluntary movements on moving surfaces. The system includes a motion platform used to provide the perturbation, an innovative body-tracking system suitable for robots, humans and exoskeletons, control software and a set of predefined perturbations, a humanoid robot used to test algorithms, and analysis software providing state of the art data analysis used to provide quantitative measures of performance. In order to provide versatility, the design of the system is oriented to modularity: all its components can be replaced or extended according to experimental needs, adding additional perturbation profiles, new evaluation principles, and alternative tracking systems. It will be possible to use the system with different kinds of robots and exoskeletons as well as for human experiments aimed at gaining insights into human balance capabilities.
The Importance of Models in Data Analysis with Small Human Movement Datasets -- Inspirations from Neurorobotics Applied to Posture Control of Humanoids and Humans
Feb 04, 2021

This work presents a system identification procedure based on Convolutional Neural Networks (CNN) for human posture control using the DEC (Disturbance Estimation and Compensation) parametric model. The modular structure of the proposed control model inspired the design of a modular identification procedure, in the sense that the same neural network is used to identify the parameters of the modules controlling different degrees of freedom. In this way the presented examples of body sway induced by external stimuli provide several training samples at once.