 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Likeness Indicator for Robot Posture Control and Balance
Oct 27, 2022Similarly to humans, humanoid robots require posture control and balance to walk and interact with the environment. In this work posture control in perturbed conditions is evaluated as a performance test for humanoid control. A specific performance indicator is proposed: the score is based on the comparison between the body sway of the tested humanoid standing on a moving surface and the sway produced by healthy subjects performing the same experiment. This approach is here oriented to the evaluation of a human-likeness. The measure is tested using a humanoid robot in order to demonstrate a typical usage of the proposed evaluation scheme and an example of how to improve robot control on the basis of such a performance indicator score
* 16 pages, 5 Figures. arXiv admin note: substantial text overlap with arXiv:2110.14395
A Bio-inspired Modular System for Humanoid Posture Control
Dec 04, 2021


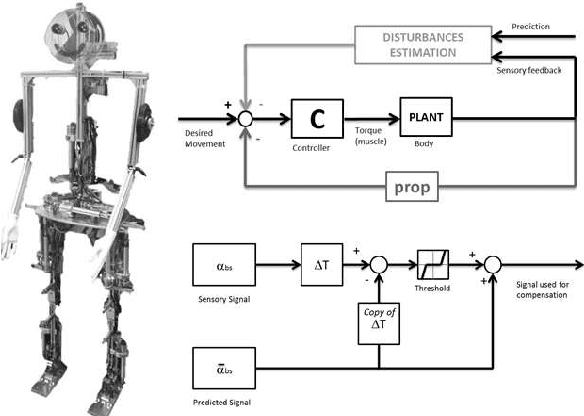
Bio-inspired sensorimotor control systems may be appealing to roboticists who try to solve problems of multiDOF humanoids and human-robot interactions. This paper presents a simple posture control concept from neuroscience, called disturbance estimation and compensation, DEC concept [1]. It provides human-like mechanical compliance due to low loop gain, tolerance of time delays, and automatic adjustment to changes in external disturbance scenarios. Its outstanding feature is that it uses feedback of multisensory disturbance estimates rather than 'raw' sensory signals for disturbance compensation. After proof-of-principle tests in 1 and 2 DOF posture control robots, we present here a generalized DEC control module for multi-DOF robots. In the control layout, one DEC module controls one DOF (modular control architecture). Modules of neighboring joints are synergistically interconnected using vestibular information in combination with joint angle and torque signals. These sensory interconnections allow each module to control the kinematics of the more distal links as if they were a single link. This modular design makes the complexity of the robot control scale linearly with the DOFs and error robustness high compared to monolithic control architectures. The presented concept uses Matlab/Simulink (The MathWorks, Natick, USA) for both, model simulation and robot control and will be available as open library
Evaluating Robot Posture Control and Balance by Comparison to Human Subjects using Human Likeness Measures
Oct 27, 2021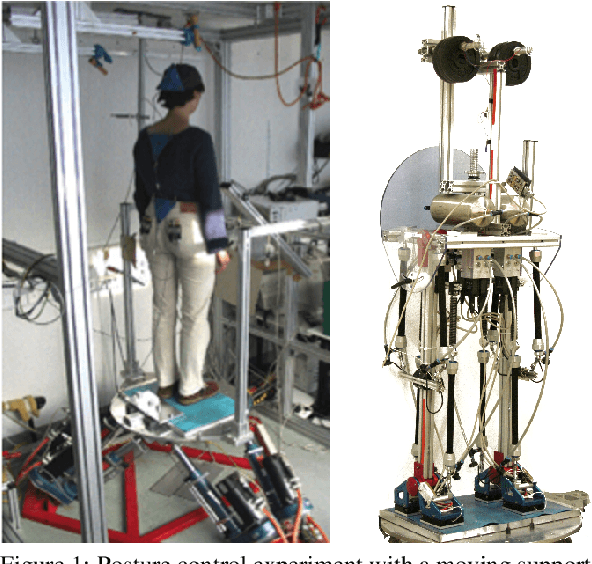

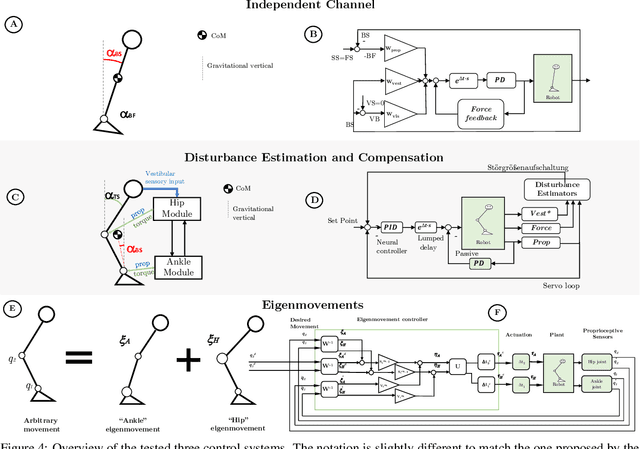
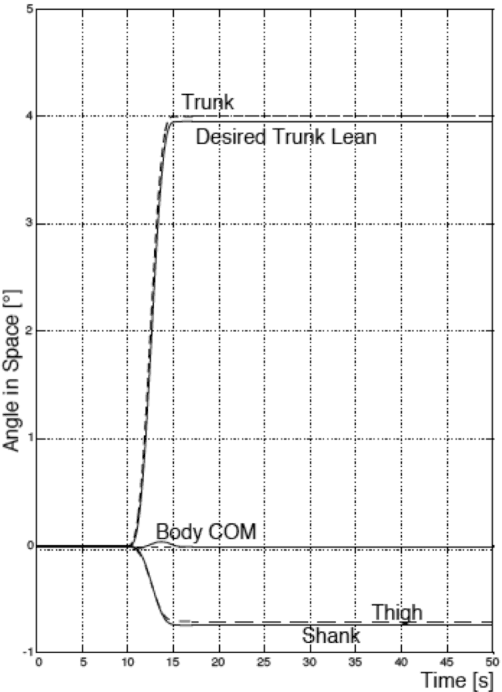
Posture control and balance are basic requirements for a humanoid robot performing motor tasks like walking and interacting with the environment. For this reason, posture control is one of the elements taken into account when evaluating the performance of humanoids. In this work, we describe and analyze a performance indicator based on the comparison between the body sway of a robot standing on a moving surface and the one of healthy subjects performing the same experiment. This approach is here oriented to the evaluation of human likeness. The measure is tested with three human-inspired humanoid posture control systems, the independent channel (IC), the disturbance identification and compensation (DEC), and the eigenmovement (EM) control. The potential and the limitations connected with such human-inspired humanoid control mechanisms are then discussed.
COMTEST Project: A Complete Modular Test Stand for Human and Humanoid Posture Control and Balance
Apr 24, 2021



This work presents a system to benchmark humanoid posture control and balance performances under perturbed conditions. The specific benchmarking scenario consists, for example, of balancing upright stance while performing voluntary movements on moving surfaces. The system includes a motion platform used to provide the perturbation, an innovative body-tracking system suitable for robots, humans and exoskeletons, control software and a set of predefined perturbations, a humanoid robot used to test algorithms, and analysis software providing state of the art data analysis used to provide quantitative measures of performance. In order to provide versatility, the design of the system is oriented to modularity: all its components can be replaced or extended according to experimental needs, adding additional perturbation profiles, new evaluation principles, and alternative tracking systems. It will be possible to use the system with different kinds of robots and exoskeletons as well as for human experiments aimed at gaining insights into human balance capabilities.
The Importance of Models in Data Analysis with Small Human Movement Datasets -- Inspirations from Neurorobotics Applied to Posture Control of Humanoids and Humans
Feb 04, 2021

This work presents a system identification procedure based on Convolutional Neural Networks (CNN) for human posture control using the DEC (Disturbance Estimation and Compensation) parametric model. The modular structure of the proposed control model inspired the design of a modular identification procedure, in the sense that the same neural network is used to identify the parameters of the modules controlling different degrees of freedom. In this way the presented examples of body sway induced by external stimuli provide several training samples at once.
Deep Learning for Posture Control Nonlinear Model System and Noise Identification
Jun 04, 2020


In this work we present a system identification procedure based on Convolutional Neural Networks (CNN) for human posture control models. A usual approach to the study of human posture control consists in the identification of parameters for a control system. In this context, linear models are particularly popular due to the relative simplicity in identifying the required parameters and to analyze the results. Nonlinear models, conversely, are required to predict the real behavior exhibited by human subjects and hence it is desirable to use them in posture control analysis. The use of CNN aims to overcome the heavy computational requirement for the identification of nonlinear models, in order to make the analysis of experimental data less time consuming and, in perspective, to make such analysis feasible in the context of clinical tests. Some potential implications of the method for humanoid robotics are also discussed.