 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Likeness Indicator for Robot Posture Control and Balance
Oct 27, 2022Similarly to humans, humanoid robots require posture control and balance to walk and interact with the environment. In this work posture control in perturbed conditions is evaluated as a performance test for humanoid control. A specific performance indicator is proposed: the score is based on the comparison between the body sway of the tested humanoid standing on a moving surface and the sway produced by healthy subjects performing the same experiment. This approach is here oriented to the evaluation of a human-likeness. The measure is tested using a humanoid robot in order to demonstrate a typical usage of the proposed evaluation scheme and an example of how to improve robot control on the basis of such a performance indicator score
* 16 pages, 5 Figures. arXiv admin note: substantial text overlap with arXiv:2110.14395
EXOSMOOTH: Test of Innovative EXOskeleton Control for SMOOTH Assistance, With and Without Ankle Actuation
Mar 08, 2022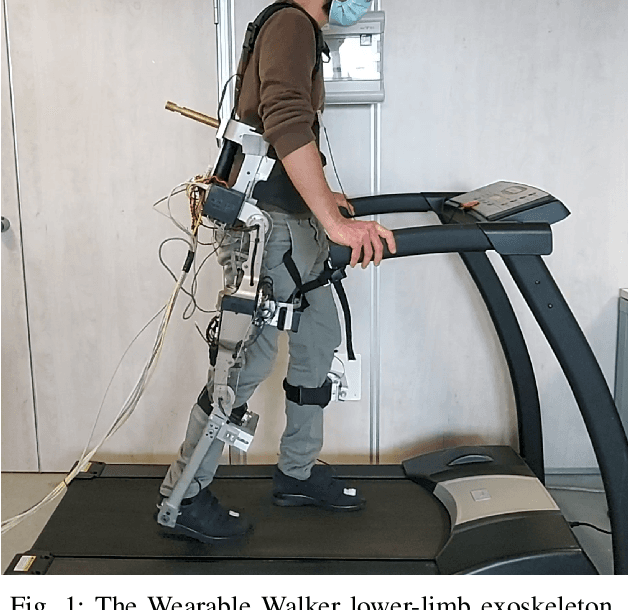
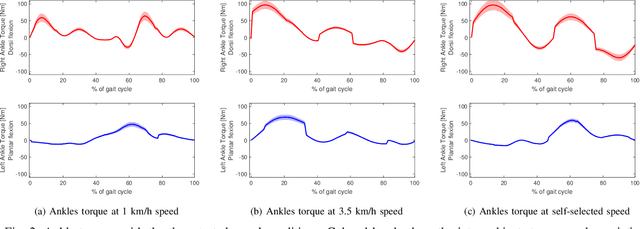

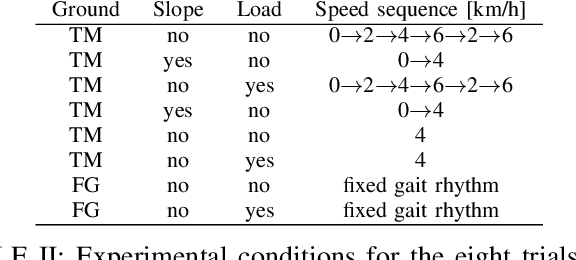
This work presents a description of the EXOSMOOTH project, oriented to the benchmarking of lower limb exoskeletons performance. In the field of assisted walking by powered lower limb exoskeletons, the EXOSMOOTH project proposes an experiment that targets two scientific questions. The first question is related to the effectiveness of a novel control strategy for smooth assistance. Current assist strategies are based on controllers that switch the assistance level based on the gait segmentation provided by a finite state machine. The proposed strategy aims at managing phase transitions to provide a smoother assistance to the user, thus increasing the device transparency and comfort for the user. The second question is the role of the actuation at the ankle joint in assisted walking. Many novel exoskeletons devised for industrial applications do not feature an actuated ankle joint. In the EXOSMOOTH project, the ankle joint actuation will be one experimental factor to have a direct assessment of the role of an actuated joint in assisted walking. Preliminary results of 15 healthy subjects walking at different speeds while wearing a lower limb exoskeleton supported the rationale behind this question: having an actuated ankle joint could potentially reduce the torques applied by the user by a maximum value of 85 Nm. The two aforementioned questions will be investigated in a protocol that includes walking on a treadmill and on flat ground, with or without slope, and with a load applied on the back. In addition, the interaction forces measured at the exoskeleton harnesses will be used to assess the comfort of the user and the effectiveness of the control strategy to improve transparency.
Evaluating Robot Posture Control and Balance by Comparison to Human Subjects using Human Likeness Measures
Oct 27, 2021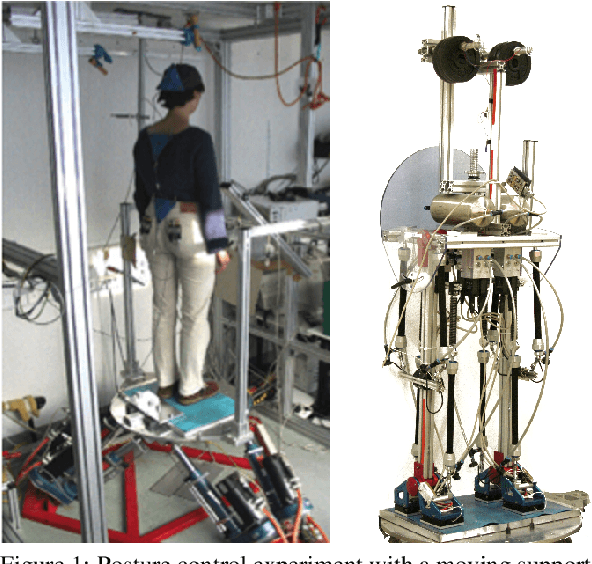

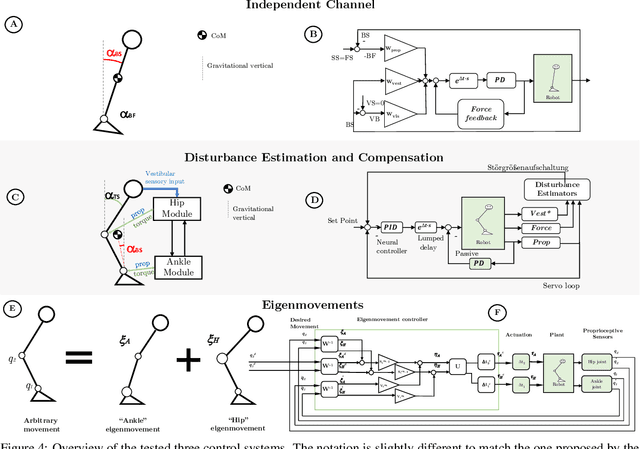
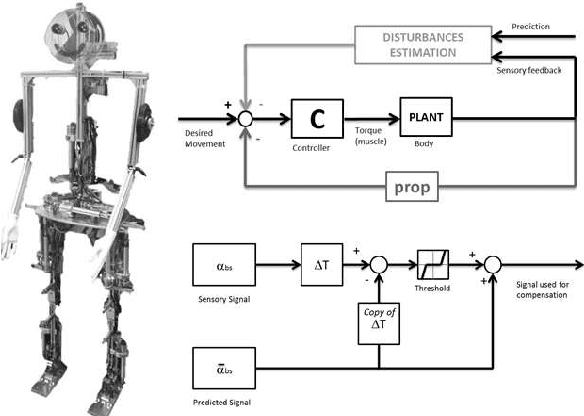
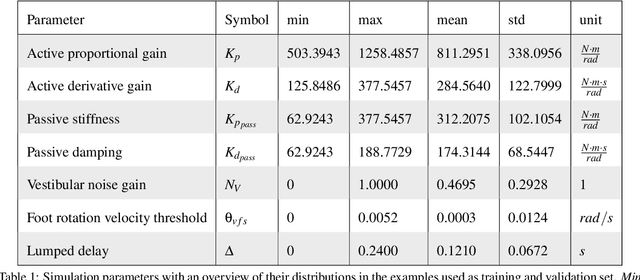
Posture control and balance are basic requirements for a humanoid robot performing motor tasks like walking and interacting with the environment. For this reason, posture control is one of the elements taken into account when evaluating the performance of humanoids. In this work, we describe and analyze a performance indicator based on the comparison between the body sway of a robot standing on a moving surface and the one of healthy subjects performing the same experiment. This approach is here oriented to the evaluation of human likeness. The measure is tested with three human-inspired humanoid posture control systems, the independent channel (IC), the disturbance identification and compensation (DEC), and the eigenmovement (EM) control. The potential and the limitations connected with such human-inspired humanoid control mechanisms are then discussed.
COMTEST Project: A Complete Modular Test Stand for Human and Humanoid Posture Control and Balance
Apr 24, 2021



This work presents a system to benchmark humanoid posture control and balance performances under perturbed conditions. The specific benchmarking scenario consists, for example, of balancing upright stance while performing voluntary movements on moving surfaces. The system includes a motion platform used to provide the perturbation, an innovative body-tracking system suitable for robots, humans and exoskeletons, control software and a set of predefined perturbations, a humanoid robot used to test algorithms, and analysis software providing state of the art data analysis used to provide quantitative measures of performance. In order to provide versatility, the design of the system is oriented to modularity: all its components can be replaced or extended according to experimental needs, adding additional perturbation profiles, new evaluation principles, and alternative tracking systems. It will be possible to use the system with different kinds of robots and exoskeletons as well as for human experiments aimed at gaining insights into human balance capabilities.
The Importance of Models in Data Analysis with Small Human Movement Datasets -- Inspirations from Neurorobotics Applied to Posture Control of Humanoids and Humans
Feb 04, 2021

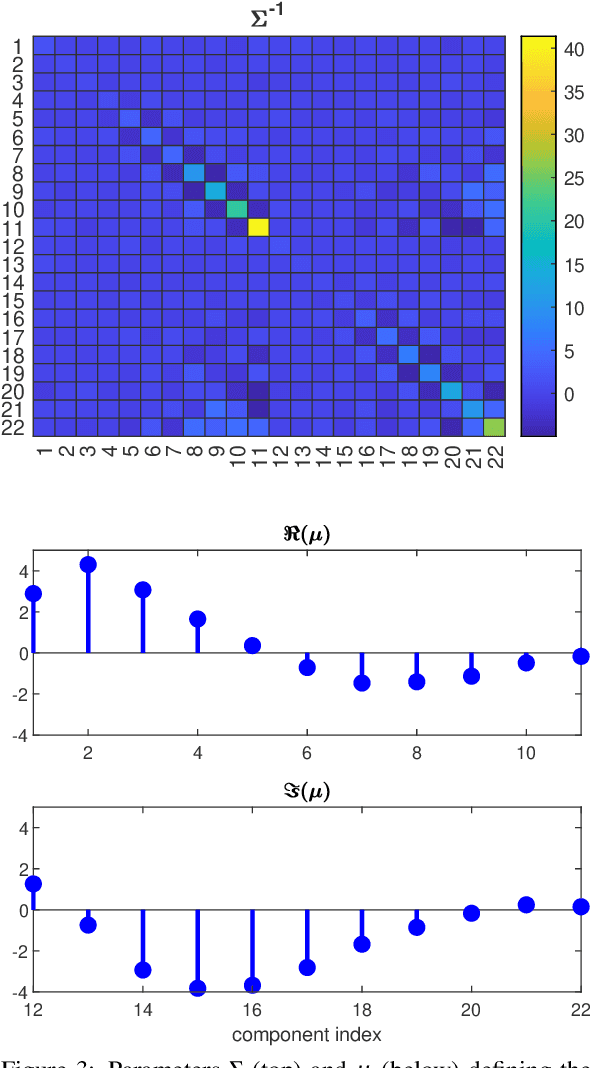
This work presents a system identification procedure based on Convolutional Neural Networks (CNN) for human posture control using the DEC (Disturbance Estimation and Compensation) parametric model. The modular structure of the proposed control model inspired the design of a modular identification procedure, in the sense that the same neural network is used to identify the parameters of the modules controlling different degrees of freedom. In this way the presented examples of body sway induced by external stimuli provide several training samples at once.
Deep Learning for Posture Control Nonlinear Model System and Noise Identification
Jun 04, 2020


In this work we present a system identification procedure based on Convolutional Neural Networks (CNN) for human posture control models. A usual approach to the study of human posture control consists in the identification of parameters for a control system. In this context, linear models are particularly popular due to the relative simplicity in identifying the required parameters and to analyze the results. Nonlinear models, conversely, are required to predict the real behavior exhibited by human subjects and hence it is desirable to use them in posture control analysis. The use of CNN aims to overcome the heavy computational requirement for the identification of nonlinear models, in order to make the analysis of experimental data less time consuming and, in perspective, to make such analysis feasible in the context of clinical tests. Some potential implications of the method for humanoid robotics are also discussed.