 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransparency evaluation for the Kinematic Design of the Harnesses through Human-Exoskeleton Interaction Modeling
Sep 27, 2024



Lower Limb Exoskeletons (LLEs) are wearable robots that provide mechanical power to the user. Human-exoskeleton (HE) connections must preserve the user's natural behavior during the interaction, avoiding undesired forces. Therefore, numerous works focus on their minimization. Given the inherent complications of repeatedly prototyping and experimentally testing a device, modeling the exoskeleton and its physical interaction with the user emerges as a valuable approach for assessing the design effects. This paper proposes a novel method to compare different exoskeleton configurations with a flexible simulation tool. This approach contemplates simulating the dynamics of the device, including its interaction with the wearer, to evaluate multiple connection mechanism designs along with the kinematics and actuation of the LLE. This evaluation is based on the minimization of the interaction wrenches through an optimization process that includes the impedance parameters at the interfaces as optimization variables and the similarity of the LLE's joint variables trajectories with the motion of the wearer's articulations. Exploratory tests are conducted using the Wearable Walker LLE in different configurations and measuring the interaction forces. Experimental data are then compared to the optimization outcomes, proving that the proposed method provides contact wrench estimations consistent with the collected measurements and previous outcomes from the literature. Copyright 2024 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.
User-centered evaluation of the Wearable Walker lower limb exoskeleton, preliminary assessment based on the Experience protocol
Aug 16, 2024



Using lower-limbs exoskeletons provides potential advantages in terms of productivity and safety associated with reduced stress. However, complex issues in human-robot interaction are still open, such as the physiological effects of exoskeletons and the impact on the user's subjective experience. In this work, an innovative exoskeleton, the Wearable Walker, is assessed using the EXPERIENCE benchmarking protocol from the EUROBENCH project. The Wearable Walker is a lower-limb exoskeleton that enhances human abilities, such as carrying loads. The device uses a unique control approach called Blend Control that provides smooth assistance torques. It operates two models simultaneously, one in the case in which the left foot is grounded and another for the grounded right foot. These models generate assistive torques combined to provide continuous and smooth overall assistance, preventing any abrupt changes in torque due to model switching. The EXPERIENCE protocol consists of walking on flat ground while gathering physiological signals such as heart rate, its variability, respiration rate, and galvanic skin response and completing a questionnaire. The test was performed with five healthy subjects. The scope of the present study is twofold: to evaluate the specific exoskeleton and its current control system to gain insight into possible improvements and to present a case study for a formal and replicable benchmarking of wearable robots.
EXOSMOOTH: Test of Innovative EXOskeleton Control for SMOOTH Assistance, With and Without Ankle Actuation
Mar 08, 2022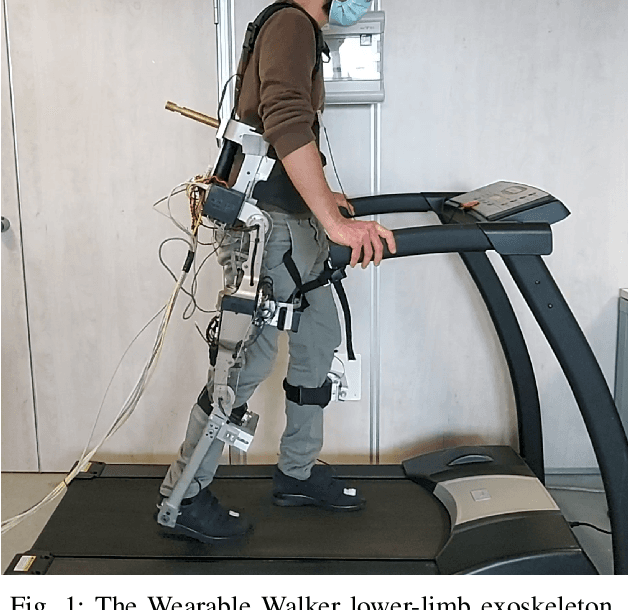
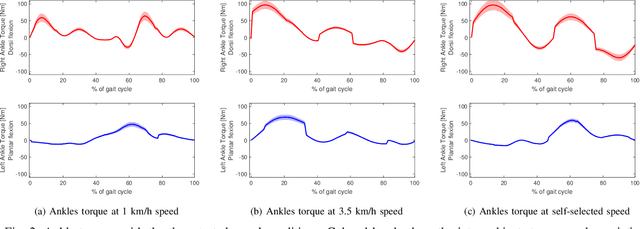

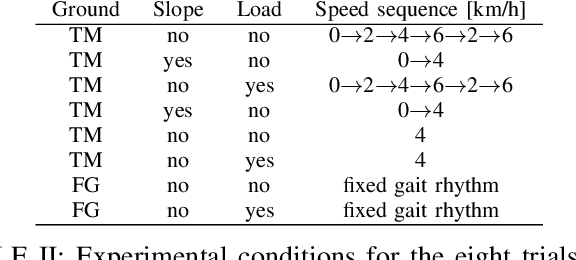
This work presents a description of the EXOSMOOTH project, oriented to the benchmarking of lower limb exoskeletons performance. In the field of assisted walking by powered lower limb exoskeletons, the EXOSMOOTH project proposes an experiment that targets two scientific questions. The first question is related to the effectiveness of a novel control strategy for smooth assistance. Current assist strategies are based on controllers that switch the assistance level based on the gait segmentation provided by a finite state machine. The proposed strategy aims at managing phase transitions to provide a smoother assistance to the user, thus increasing the device transparency and comfort for the user. The second question is the role of the actuation at the ankle joint in assisted walking. Many novel exoskeletons devised for industrial applications do not feature an actuated ankle joint. In the EXOSMOOTH project, the ankle joint actuation will be one experimental factor to have a direct assessment of the role of an actuated joint in assisted walking. Preliminary results of 15 healthy subjects walking at different speeds while wearing a lower limb exoskeleton supported the rationale behind this question: having an actuated ankle joint could potentially reduce the torques applied by the user by a maximum value of 85 Nm. The two aforementioned questions will be investigated in a protocol that includes walking on a treadmill and on flat ground, with or without slope, and with a load applied on the back. In addition, the interaction forces measured at the exoskeleton harnesses will be used to assess the comfort of the user and the effectiveness of the control strategy to improve transparency.
Identification of Gait Phases with Neural Networks for Smooth Transparent Control of a Lower Limb Exoskeleton
Jul 08, 2021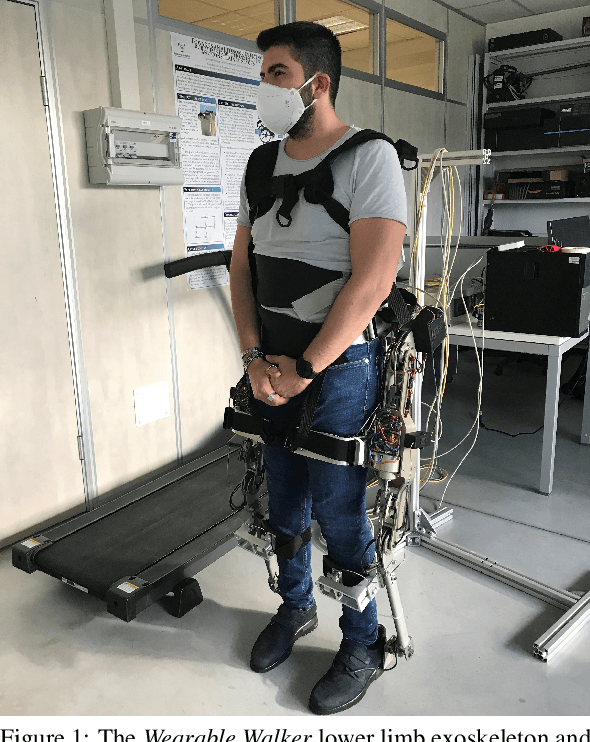
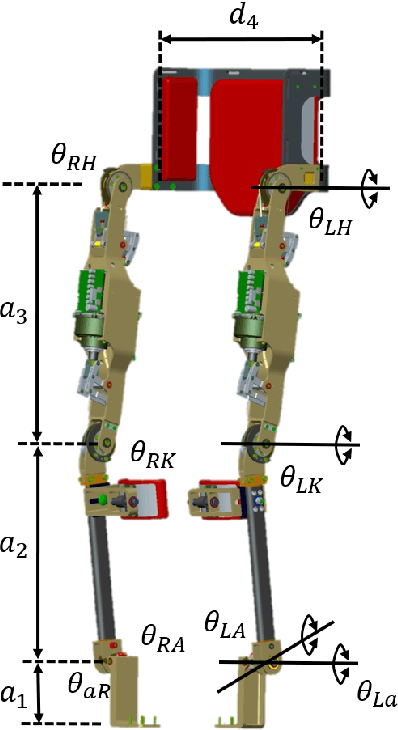
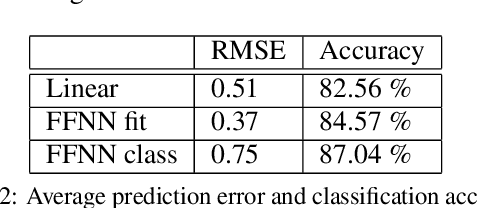
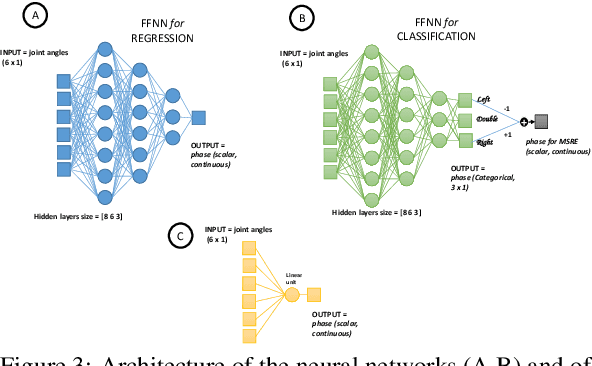
Lower limbs exoskeletons provide assistance during standing, squatting, and walking. Gait dynamics, in particular, implies a change in the configuration of the device in terms of contact points, actuation, and system dynamics in general. In order to provide a comfortable experience and maximize performance, the exoskeleton should be controlled smoothly and in a transparent way, which means respectively, minimizing the interaction forces with the user and jerky behavior due to transitions between different configurations. A previous study showed that a smooth control of the exoskeleton can be achieved using a gait phase segmentation based on joint kinematics. Such a segmentation system can be implemented as linear regression and should be personalized for the user after a calibration procedure. In this work, a nonlinear segmentation function based on neural networks is implemented and compared with linear regression. An on-line implementation is then proposed and tested with a subject.