 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransparency evaluation for the Kinematic Design of the Harnesses through Human-Exoskeleton Interaction Modeling
Sep 27, 2024



Lower Limb Exoskeletons (LLEs) are wearable robots that provide mechanical power to the user. Human-exoskeleton (HE) connections must preserve the user's natural behavior during the interaction, avoiding undesired forces. Therefore, numerous works focus on their minimization. Given the inherent complications of repeatedly prototyping and experimentally testing a device, modeling the exoskeleton and its physical interaction with the user emerges as a valuable approach for assessing the design effects. This paper proposes a novel method to compare different exoskeleton configurations with a flexible simulation tool. This approach contemplates simulating the dynamics of the device, including its interaction with the wearer, to evaluate multiple connection mechanism designs along with the kinematics and actuation of the LLE. This evaluation is based on the minimization of the interaction wrenches through an optimization process that includes the impedance parameters at the interfaces as optimization variables and the similarity of the LLE's joint variables trajectories with the motion of the wearer's articulations. Exploratory tests are conducted using the Wearable Walker LLE in different configurations and measuring the interaction forces. Experimental data are then compared to the optimization outcomes, proving that the proposed method provides contact wrench estimations consistent with the collected measurements and previous outcomes from the literature. Copyright 2024 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.
User-centered evaluation of the Wearable Walker lower limb exoskeleton, preliminary assessment based on the Experience protocol
Aug 16, 2024



Using lower-limbs exoskeletons provides potential advantages in terms of productivity and safety associated with reduced stress. However, complex issues in human-robot interaction are still open, such as the physiological effects of exoskeletons and the impact on the user's subjective experience. In this work, an innovative exoskeleton, the Wearable Walker, is assessed using the EXPERIENCE benchmarking protocol from the EUROBENCH project. The Wearable Walker is a lower-limb exoskeleton that enhances human abilities, such as carrying loads. The device uses a unique control approach called Blend Control that provides smooth assistance torques. It operates two models simultaneously, one in the case in which the left foot is grounded and another for the grounded right foot. These models generate assistive torques combined to provide continuous and smooth overall assistance, preventing any abrupt changes in torque due to model switching. The EXPERIENCE protocol consists of walking on flat ground while gathering physiological signals such as heart rate, its variability, respiration rate, and galvanic skin response and completing a questionnaire. The test was performed with five healthy subjects. The scope of the present study is twofold: to evaluate the specific exoskeleton and its current control system to gain insight into possible improvements and to present a case study for a formal and replicable benchmarking of wearable robots.
Zero123-6D: Zero-shot Novel View Synthesis for RGB Category-level 6D Pose Estimation
Mar 21, 2024



Estimating the pose of objects through vision is essential to make robotic platforms interact with the environment. Yet, it presents many challenges, often related to the lack of flexibility and generalizability of state-of-the-art solutions. Diffusion models are a cutting-edge neural architecture transforming 2D and 3D computer vision, outlining remarkable performances in zero-shot novel-view synthesis. Such a use case is particularly intriguing for reconstructing 3D objects. However, localizing objects in unstructured environments is rather unexplored. To this end, this work presents Zero123-6D to demonstrate the utility of Diffusion Model-based novel-view-synthesizers in enhancing RGB 6D pose estimation at category-level by integrating them with feature extraction techniques. The outlined method exploits such a novel view synthesizer to expand a sparse set of RGB-only reference views for the zero-shot 6D pose estimation task. Experiments are quantitatively analyzed on the CO3D dataset, showcasing increased performance over baselines, a substantial reduction in data requirements, and the removal of the necessity of depth information.
A 6-DOF haptic manipulation system to verify assembly procedures on CAD models
Sep 27, 2019
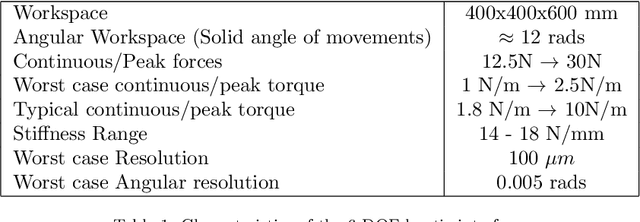
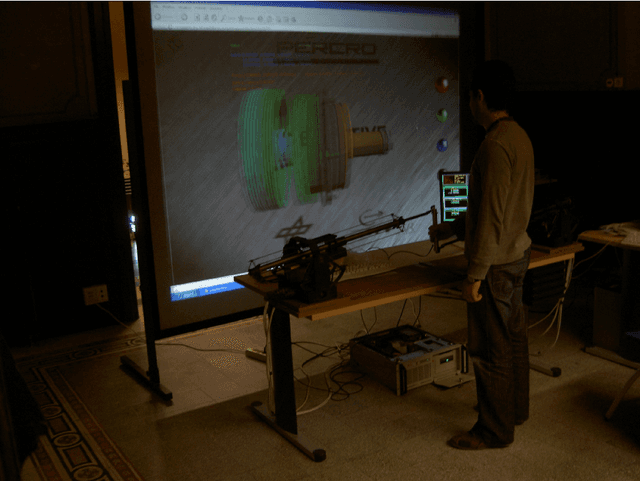

During the design phase of products and before going into production, it is necessary to verify the presence of mechanical plays, tolerances, and encumbrances on production mockups. This work introduces a multi-modal system that allows verifying assembly procedures of products in Virtual Reality starting directly from CAD models. Thus leveraging the costs and speeding up the assessment phase in product design. For this purpose, the design of a novel 6-DOF Haptic device is presented. The achieved performance of the system has been validated in a demonstration scenario employing state-of-the-art volumetric rendering of interaction forces together with a stereoscopic visualization setup.
Robust and Subject-Independent Driving Manoeuvre Anticipation through Domain-Adversarial Recurrent Neural Networks
Feb 26, 2019



Through deep learning and computer vision techniques, driving manoeuvres can be predicted accurately a few seconds in advance. Even though adapting a learned model to new drivers and different vehicles is key for robust driver-assistance systems, this problem has received little attention so far. This work proposes to tackle this challenge through domain adaptation, a technique closely related to transfer learning. A proof of concept for the application of a Domain-Adversarial Recurrent Neural Network (DA-RNN) to multi-modal time series driving data is presented, in which domain-invariant features are learned by maximizing the loss of an auxiliary domain classifier. Our implementation is evaluated using a leave-one-driver-out approach on individual drivers from the Brain4Cars dataset, as well as using a new dataset acquired through driving simulations, yielding an average increase in performance of 30% and 114% respectively compared to no adaptation. We also show the importance of fine-tuning sections of the network to optimise the extraction of domain-independent features. The results demonstrate the applicability of the approach to driver-assistance systems as well as training and simulation environments.
* 40 pages, 4 figures. Published online in Robotics and Autonomous Systems