 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUAV/UGV Autonomous Cooperation: UAV Assists UGV to Climb a Cliff by Attaching a Tether
Mar 12, 2019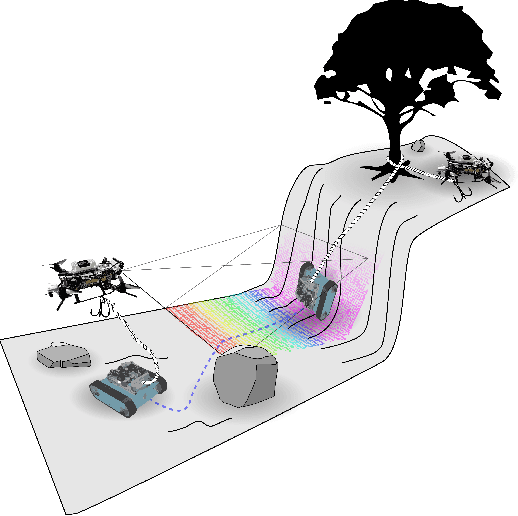
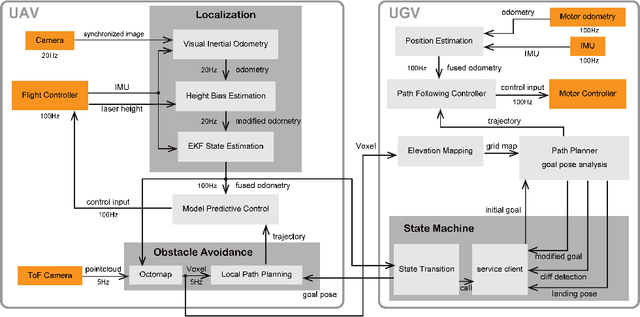
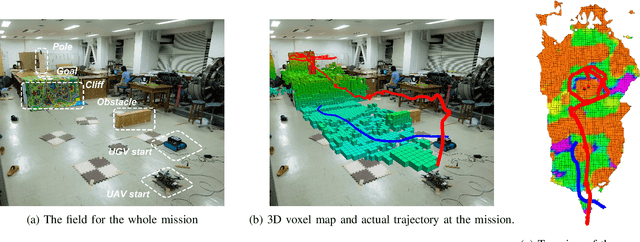
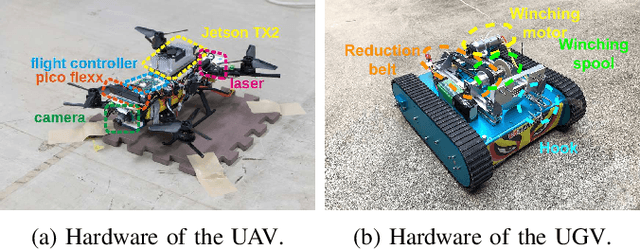
This paper proposes a novel cooperative system for an Unmanned Aerial Vehicle (UAV) and an Unmanned Ground Vehicle (UGV) which utilizes the UAV not only as a flying sensor but also as a tether attachment device. Two robots are connected with a tether, allowing the UAV to anchor the tether to a structure located at the top of a steep terrain, impossible to reach for UGVs. Thus, enhancing the poor traversability of the UGV by not only providing a wider range of scanning and mapping from the air, but also by allowing the UGV to climb steep terrains with the winding of the tether. In addition, we present an autonomous framework for the collaborative navigation and tether attachment in an unknown environment. The UAV employs visual inertial navigation with 3D voxel mapping and obstacle avoidance planning. The UGV makes use of the voxel map and generates an elevation map to execute path planning based on a traversability analysis. Furthermore, we compared the pros and cons of possible methods for the tether anchoring from multiple points of view. To increase the probability of successful anchoring, we evaluated the anchoring strategy with an experiment. Finally, the feasibility and capability of our proposed system were demonstrated by an autonomous mission experiment in the field with an obstacle and a cliff.
Dynamic and Static Topic Model for Analyzing Time-Series Document Collections
May 06, 2018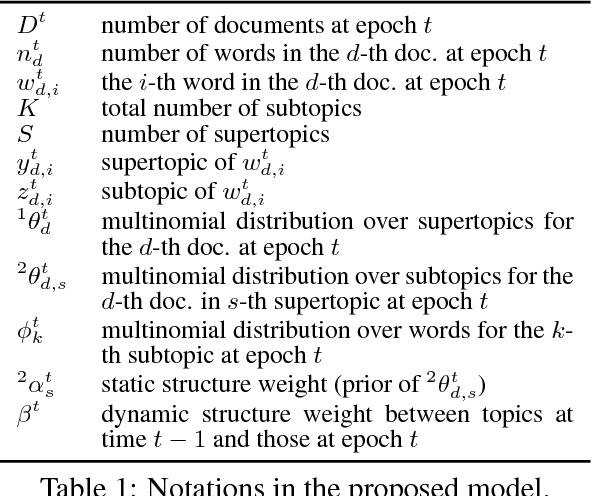
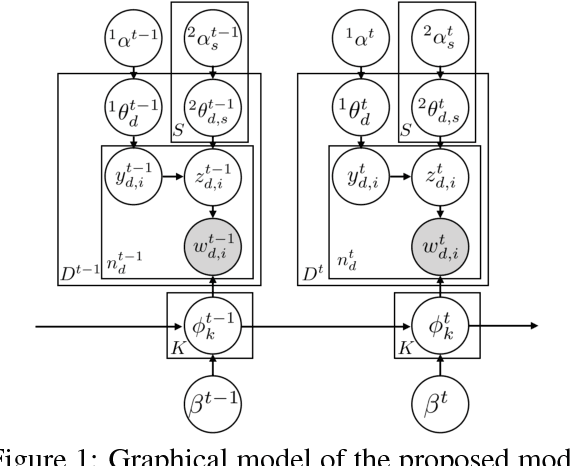
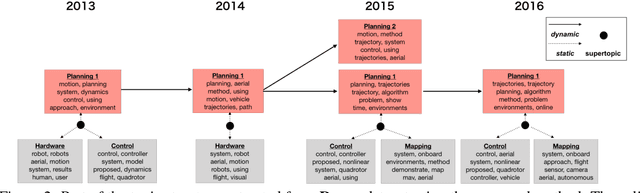
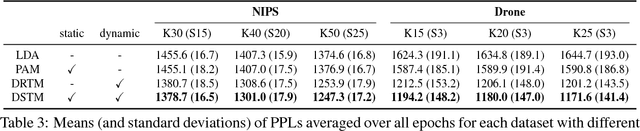
For extracting meaningful topics from texts, their structures should be considered properly. In this paper, we aim to analyze structured time-series documents such as a collection of news articles and a series of scientific papers, wherein topics evolve along time depending on multiple topics in the past and are also related to each other at each time. To this end, we propose a dynamic and static topic model, which simultaneously considers the dynamic structures of the temporal topic evolution and the static structures of the topic hierarchy at each time. We show the results of experiments on collections of scientific papers, in which the proposed method outperformed conventional models. Moreover, we show an example of extracted topic structures, which we found helpful for analyzing research activities.