 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKernelFoundry: Hardware-aware evolutionary GPU kernel optimization
Mar 12, 2026Optimizing GPU kernels presents a significantly greater challenge for large language models (LLMs) than standard code generation tasks, as it requires understanding hardware architecture, parallel optimization strategies, and performance profiling outputs. Most existing LLM-based approaches to kernel generation rely on simple prompting and feedback loops, incorporating hardware awareness only indirectly through profiling feedback. We introduce KernelFoundry, an evolutionary framework that efficiently explores the GPU kernel design space through three key mechanisms: (1) MAP-Elites quality-diversity search with kernel-specific behavioral dimensions to sustain exploration across diverse optimization strategies; (2) meta-prompt evolution, which co-evolves prompts with kernels to uncover task-specific optimization strategies, and (3) template-based parameter optimization to tune kernels to inputs and hardware. We evaluate this framework on KernelBench, robust-kbench, and custom tasks, generating SYCL kernels as a cross-platform GPU programming model and CUDA kernels for comparison to prior work. Our approach consistently outperforms the baseline methods, achieving an average speedup of 2.3x on KernelBench for SYCL. Moreover, KernelFoundry is implemented as a distributed framework with remote access to diverse hardware, enabling rapid benchmarking and featuring a flexible user input layer that supports kernel generation for a wide range of real-world use cases beyond benchmarking.
On the potential of Optimal Transport in Geospatial Data Science
Oct 15, 2024Prediction problems in geographic information science and transportation are frequently motivated by the possibility to enhance operational efficiency. Examples range from predicting car sharing demand for optimizing relocation to forecasting traffic congestion for navigation purposes. However, conventional accuracy metrics do not account for the spatial distribution of predictions errors, despite its relevance for operations. We put forward Optimal Transport (OT) as a spatial evaluation metric and loss function. The proposed OT metric assesses the utility of spatial prediction models in terms of the relocation costs caused by prediction errors. In experiments on real and synthetic data, we demonstrate that 1) the spatial distribution of the prediction errors is relevant in many applications and can be translated to real-world costs, 2) in contrast to other metrics, OT reflects these spatial costs, and 3) OT metrics improve comparability across spatial and temporal scales. Finally, we advocate for leveraging OT as a loss function in neural networks to improve the spatial correctness of predictions. This approach not only aligns evaluation in GeoAI with operational considerations, but also signifies a step forward in refining predictions within geospatial applications. To facilitate the adoption of OT in GIS, we provide code and tutorials at https://github.com/mie-lab/geospatialOT.
Where you go is who you are -- A study on machine learning based semantic privacy attacks
Oct 26, 2023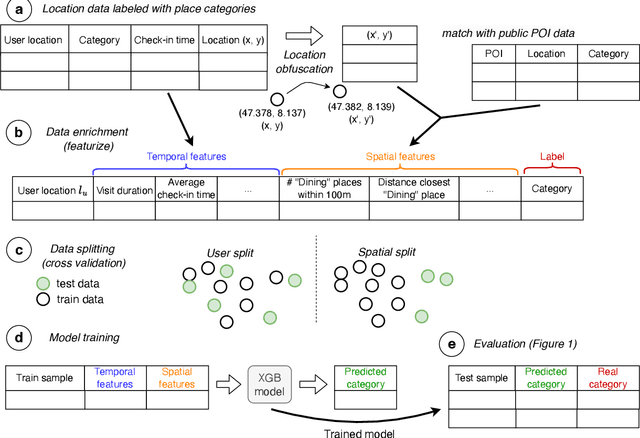
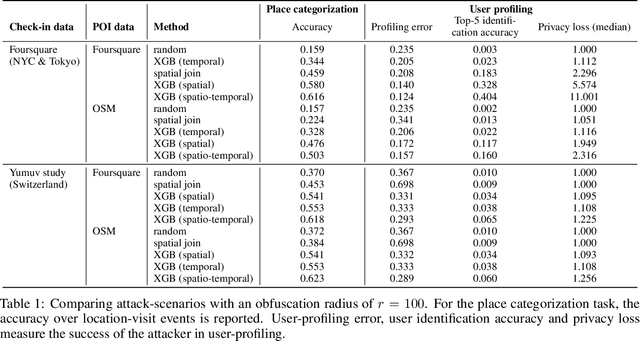
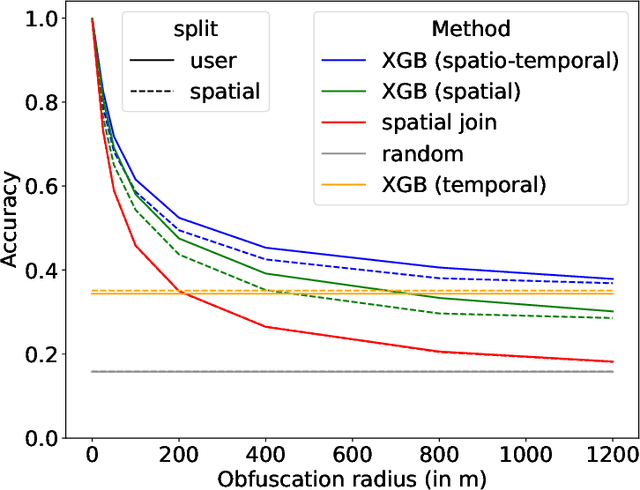
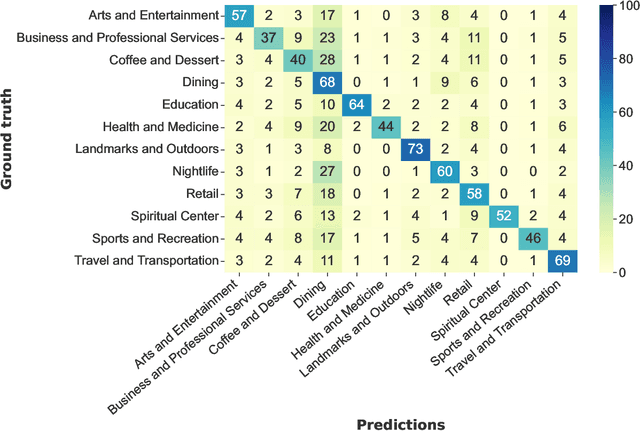
Concerns about data privacy are omnipresent, given the increasing usage of digital applications and their underlying business model that includes selling user data. Location data is particularly sensitive since they allow us to infer activity patterns and interests of users, e.g., by categorizing visited locations based on nearby points of interest (POI). On top of that, machine learning methods provide new powerful tools to interpret big data. In light of these considerations, we raise the following question: What is the actual risk that realistic, machine learning based privacy attacks can obtain meaningful semantic information from raw location data, subject to inaccuracies in the data? In response, we present a systematic analysis of two attack scenarios, namely location categorization and user profiling. Experiments on the Foursquare dataset and tracking data demonstrate the potential for abuse of high-quality spatial information, leading to a significant privacy loss even with location inaccuracy of up to 200m. With location obfuscation of more than 1 km, spatial information hardly adds any value, but a high privacy risk solely from temporal information remains. The availability of public context data such as POIs plays a key role in inference based on spatial information. Our findings point out the risks of ever-growing databases of tracking data and spatial context data, which policymakers should consider for privacy regulations, and which could guide individuals in their personal location protection measures.
Uncertainty Quantification for Image-based Traffic Prediction across Cities
Aug 11, 2023Despite the strong predictive performance of deep learning models for traffic prediction, their widespread deployment in real-world intelligent transportation systems has been restrained by a lack of interpretability. Uncertainty quantification (UQ) methods provide an approach to induce probabilistic reasoning, improve decision-making and enhance model deployment potential. To gain a comprehensive picture of the usefulness of existing UQ methods for traffic prediction and the relation between obtained uncertainties and city-wide traffic dynamics, we investigate their application to a large-scale image-based traffic dataset spanning multiple cities and time periods. We compare two epistemic and two aleatoric UQ methods on both temporal and spatio-temporal transfer tasks, and find that meaningful uncertainty estimates can be recovered. We further demonstrate how uncertainty estimates can be employed for unsupervised outlier detection on changes in city traffic dynamics. We find that our approach can capture both temporal and spatial effects on traffic behaviour in a representative case study for the city of Moscow. Our work presents a further step towards boosting uncertainty awareness in traffic prediction tasks, and aims to highlight the value contribution of UQ methods to a better understanding of city traffic dynamics.
Spatially-Aware Car-Sharing Demand Prediction
Mar 25, 2023In recent years, car-sharing services have emerged as viable alternatives to private individual mobility, promising more sustainable and resource-efficient, but still comfortable transportation. Research on short-term prediction and optimization methods has improved operations and fleet control of car-sharing services; however, long-term projections and spatial analysis are sparse in the literature. We propose to analyze the average monthly demand in a station-based car-sharing service with spatially-aware learning algorithms that offer high predictive performance as well as interpretability. In particular, we compare the spatially-implicit Random Forest model with spatially-aware methods for predicting average monthly per-station demand. The study utilizes a rich set of socio-demographic, location-based (e.g., POIs), and car-sharing-specific features as input, extracted from a large proprietary car-sharing dataset and publicly available datasets. We show that the global Random Forest model with geo-coordinates as an input feature achieves the highest predictive performance with an R-squared score of 0.87, while local methods such as Geographically Weighted Regression perform almost on par and additionally yield exciting insights into the heterogeneous spatial distributions of factors influencing car-sharing behaviour. Additionally, our study offers effective as well as highly interpretable methods for diagnosing and planning the placement of car-sharing stations.
Metropolitan Segment Traffic Speeds from Massive Floating Car Data in 10 Cities
Feb 17, 2023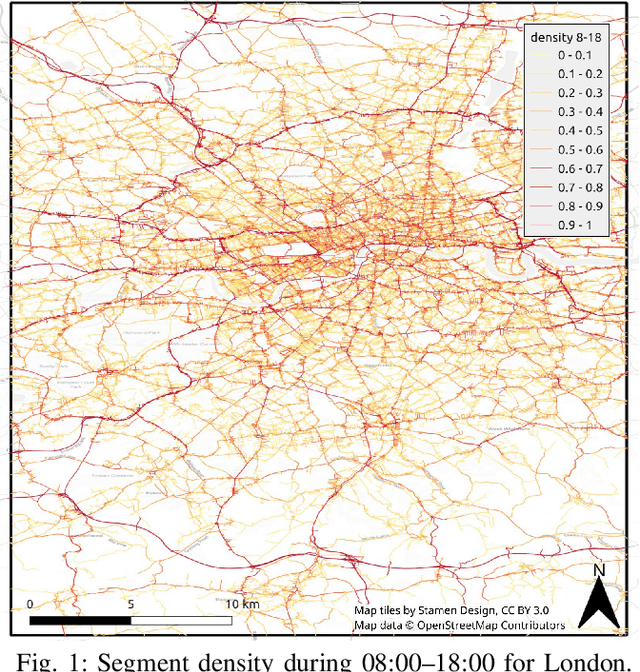
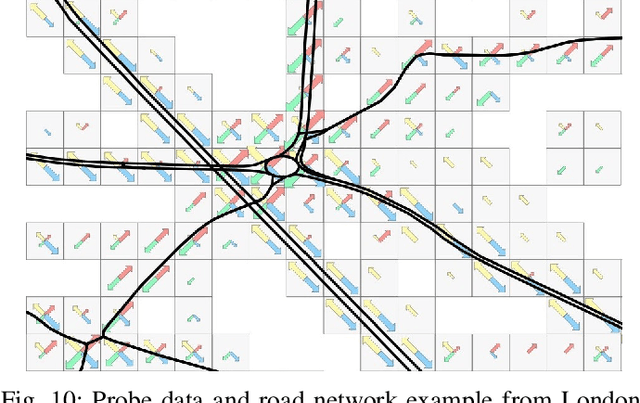
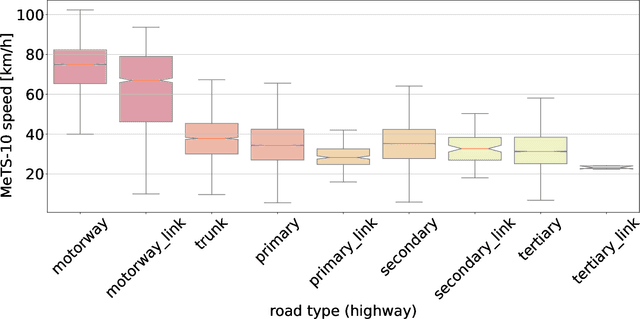
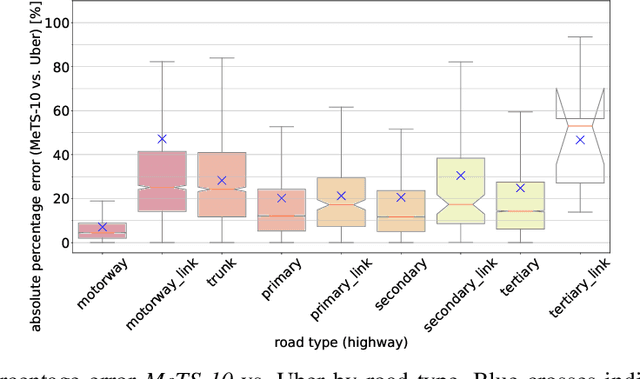
Traffic analysis is crucial for urban operations and planning, while the availability of dense urban traffic data beyond loop detectors is still scarce. We present a large-scale floating vehicle dataset of per-street segment traffic information, Metropolitan Segment Traffic Speeds from Massive Floating Car Data in 10 Cities (MeTS-10), available for 10 global cities with a 15-minute resolution for collection periods ranging between 108 and 361 days in 2019-2021 and covering more than 1500 square kilometers per metropolitan area. MeTS-10 features traffic speed information at all street levels from main arterials to local streets for Antwerp, Bangkok, Barcelona, Berlin, Chicago, Istanbul, London, Madrid, Melbourne and Moscow. The dataset leverages the industrial-scale floating vehicle Traffic4cast data with speeds and vehicle counts provided in a privacy-preserving spatio-temporal aggregation. We detail the efficient matching approach mapping the data to the OpenStreetMap road graph. We evaluate the dataset by comparing it with publicly available stationary vehicle detector data (for Berlin, London, and Madrid) and the Uber traffic speed dataset (for Barcelona, Berlin, and London). The comparison highlights the differences across datasets in spatio-temporal coverage and variations in the reported traffic caused by the binning method. MeTS-10 enables novel, city-wide analysis of mobility and traffic patterns for ten major world cities, overcoming current limitations of spatially sparse vehicle detector data. The large spatial and temporal coverage offers an opportunity for joining the MeTS-10 with other datasets, such as traffic surveys in traffic planning studies or vehicle detector data in traffic control settings.
Training Efficient Controllers via Analytic Policy Gradient
Sep 26, 2022
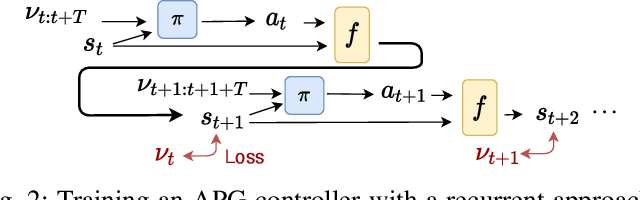
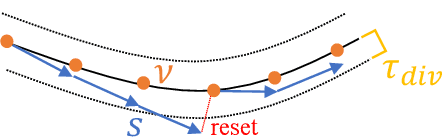
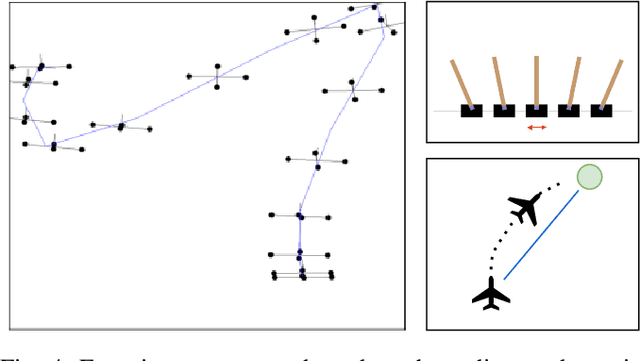
Control design for robotic systems is complex and often requires solving an optimization to follow a trajectory accurately. Online optimization approaches like Model Predictive Control (MPC) have been shown to achieve great tracking performance, but require high computing power. Conversely, learning-based offline optimization approaches, such as Reinforcement Learning (RL), allow fast and efficient execution on the robot but hardly match the accuracy of MPC in trajectory tracking tasks. In systems with limited compute, such as aerial vehicles, an accurate controller that is efficient at execution time is imperative. We propose an Analytic Policy Gradient (APG) method to tackle this problem. APG exploits the availability of differentiable simulators by training a controller offline with gradient descent on the tracking error. We address training instabilities that frequently occur with APG through curriculum learning and experiment on a widely used controls benchmark, the CartPole, and two common aerial robots, a quadrotor and a fixed-wing drone. Our proposed method outperforms both model-based and model-free RL methods in terms of tracking error. Concurrently, it achieves similar performance to MPC while requiring more than an order of magnitude less computation time. Our work provides insights into the potential of APG as a promising control method for robotics. To facilitate the exploration of APG, we open-source our code and make it available at https://github.com/lis-epfl/apg_trajectory_tracking.
Traffic4cast at NeurIPS 2021 -- Temporal and Spatial Few-Shot Transfer Learning in Gridded Geo-Spatial Processes
Apr 01, 2022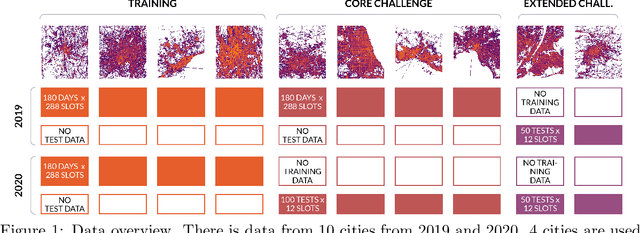
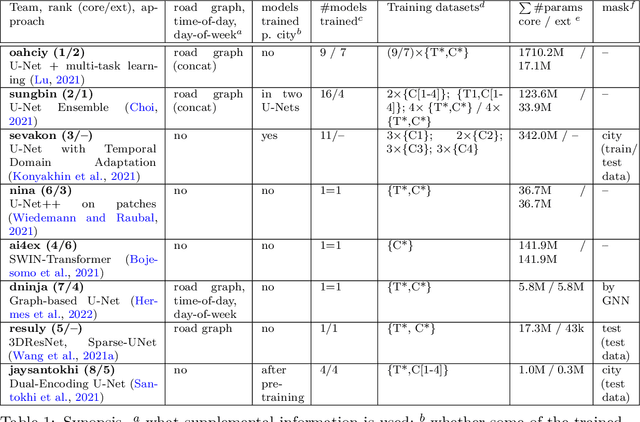

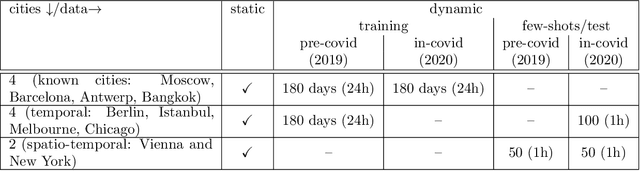
The IARAI Traffic4cast competitions at NeurIPS 2019 and 2020 showed that neural networks can successfully predict future traffic conditions 1 hour into the future on simply aggregated GPS probe data in time and space bins. We thus reinterpreted the challenge of forecasting traffic conditions as a movie completion task. U-Nets proved to be the winning architecture, demonstrating an ability to extract relevant features in this complex real-world geo-spatial process. Building on the previous competitions, Traffic4cast 2021 now focuses on the question of model robustness and generalizability across time and space. Moving from one city to an entirely different city, or moving from pre-COVID times to times after COVID hit the world thus introduces a clear domain shift. We thus, for the first time, release data featuring such domain shifts. The competition now covers ten cities over 2 years, providing data compiled from over 10^12 GPS probe data. Winning solutions captured traffic dynamics sufficiently well to even cope with these complex domain shifts. Surprisingly, this seemed to require only the previous 1h traffic dynamic history and static road graph as input.
Traffic Forecasting on Traffic Moving Snippets
Oct 27, 2021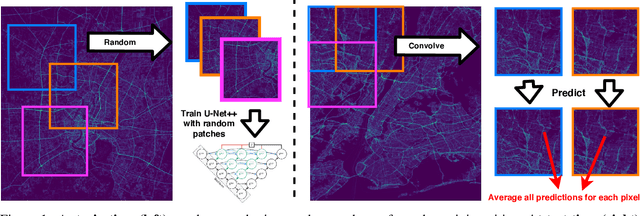
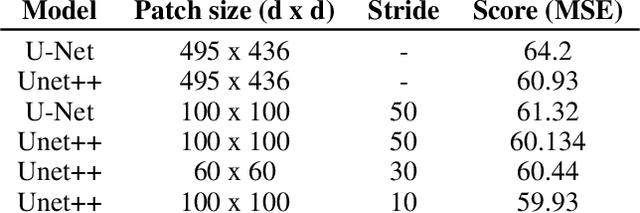
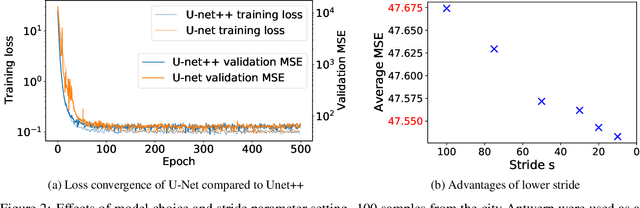
Advances in traffic forecasting technology can greatly impact urban mobility. In the traffic4cast competition, the task of short-term traffic prediction is tackled in unprecedented detail, with traffic volume and speed information available at 5 minute intervals and high spatial resolution. To improve generalization to unknown cities, as required in the 2021 extended challenge, we propose to predict small quadratic city sections, rather than processing a full-city-raster at once. At test time, breaking down the test data into spatially-cropped overlapping snippets improves stability and robustness of the final predictions, since multiple patches covering one cell can be processed independently. With the performance on the traffic4cast test data and further experiments on a validation set it is shown that patch-wise prediction indeed improves accuracy. Further advantages can be gained with a Unet++ architecture and with an increasing number of patches per sample processed at test time. We conclude that our snippet-based method, combined with other successful network architectures proposed in the competition, can leverage performance, in particular on unseen cities. All source code is available at https://github.com/NinaWie/NeurIPS2021-traffic4cast.
Accelerating COVID-19 Differential Diagnosis with Explainable Ultrasound Image Analysis
Sep 13, 2020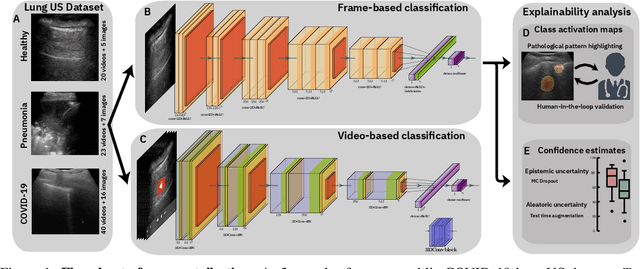
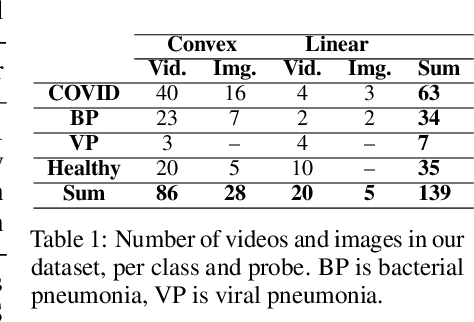
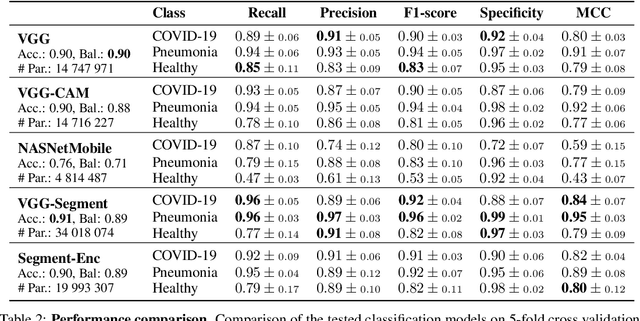
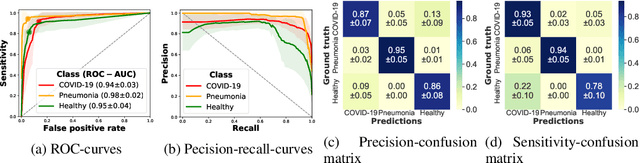
Controlling the COVID-19 pandemic largely hinges upon the existence of fast, safe, and highly-available diagnostic tools. Ultrasound, in contrast to CT or X-Ray, has many practical advantages and can serve as a globally-applicable first-line examination technique. We provide the largest publicly available lung ultrasound (US) dataset for COVID-19 consisting of 106 videos from three classes (COVID-19, bacterial pneumonia, and healthy controls); curated and approved by medical experts. On this dataset, we perform an in-depth study of the value of deep learning methods for differential diagnosis of COVID-19. We propose a frame-based convolutional neural network that correctly classifies COVID-19 US videos with a sensitivity of 0.98+-0.04 and a specificity of 0.91+-08 (frame-based sensitivity 0.93+-0.05, specificity 0.87+-0.07). We further employ class activation maps for the spatio-temporal localization of pulmonary biomarkers, which we subsequently validate for human-in-the-loop scenarios in a blindfolded study with medical experts. Aiming for scalability and robustness, we perform ablation studies comparing mobile-friendly, frame- and video-based architectures and show reliability of the best model by aleatoric and epistemic uncertainty estimates. We hope to pave the road for a community effort toward an accessible, efficient and interpretable screening method and we have started to work on a clinical validation of the proposed method. Data and code are publicly available.