 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniversal Diffusion-Based Probabilistic Downscaling
Feb 12, 2026We introduce a universal diffusion-based downscaling framework that lifts deterministic low-resolution weather forecasts into probabilistic high-resolution predictions without any model-specific fine-tuning. A single conditional diffusion model is trained on paired coarse-resolution inputs (~25 km resolution) and high-resolution regional reanalysis targets (~5 km resolution), and is applied in a fully zero-shot manner to deterministic forecasts from heterogeneous upstream weather models. Focusing on near-surface variables, we evaluate probabilistic forecasts against independent in situ station observations over lead times up to 90 h. Across a diverse set of AI-based and numerical weather prediction (NWP) systems, the ensemble mean of the downscaled forecasts consistently improves upon each model's own raw deterministic forecast, and substantially larger gains are observed in probabilistic skill as measured by CRPS. These results demonstrate that diffusion-based downscaling provides a scalable, model-agnostic probabilistic interface for enhancing spatial resolution and uncertainty representation in operational weather forecasting pipelines.
EPT-1.5 Technical Report
Oct 19, 2024We announce the release of EPT-1.5, the latest iteration in our Earth Physics Transformer (EPT) family of foundation AI earth system models. EPT-1.5 demonstrates substantial improvements over its predecessor, EPT-1. Built specifically for the European energy industry, EPT-1.5 shows remarkable performance in predicting energy-relevant variables, particularly 10m & 100m wind speed and solar radiation. Especially in wind prediction, it outperforms existing AI weather models like GraphCast, FuXi, and Pangu-Weather, as well as the leading numerical weather model, IFS HRES by the European Centre for Medium-Range Weather Forecasts (ECMWF), setting a new state of the art.
Traffic4cast at NeurIPS 2022 -- Predict Dynamics along Graph Edges from Sparse Node Data: Whole City Traffic and ETA from Stationary Vehicle Detectors
Mar 14, 2023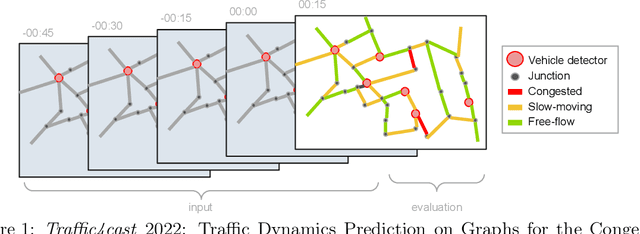
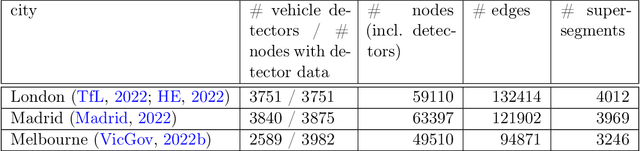
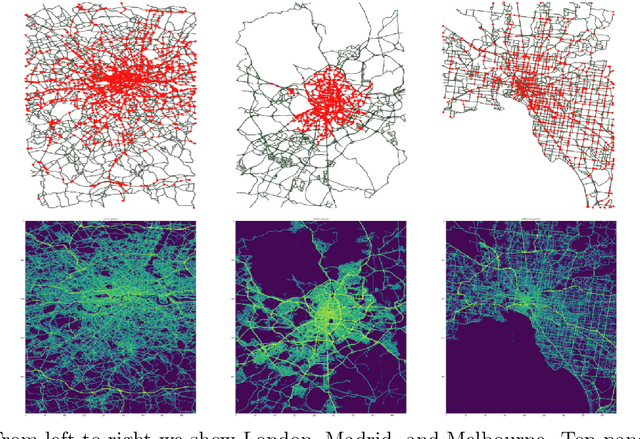
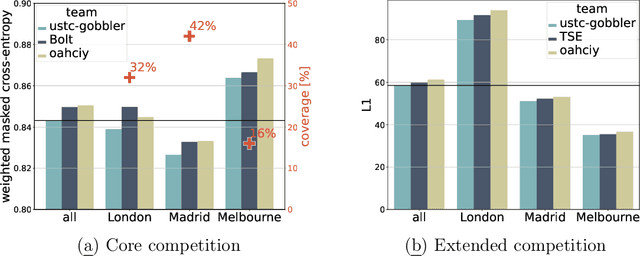
The global trends of urbanization and increased personal mobility force us to rethink the way we live and use urban space. The Traffic4cast competition series tackles this problem in a data-driven way, advancing the latest methods in machine learning for modeling complex spatial systems over time. In this edition, our dynamic road graph data combine information from road maps, $10^{12}$ probe data points, and stationary vehicle detectors in three cities over the span of two years. While stationary vehicle detectors are the most accurate way to capture traffic volume, they are only available in few locations. Traffic4cast 2022 explores models that have the ability to generalize loosely related temporal vertex data on just a few nodes to predict dynamic future traffic states on the edges of the entire road graph. In the core challenge, participants are invited to predict the likelihoods of three congestion classes derived from the speed levels in the GPS data for the entire road graph in three cities 15 min into the future. We only provide vehicle count data from spatially sparse stationary vehicle detectors in these three cities as model input for this task. The data are aggregated in 15 min time bins for one hour prior to the prediction time. For the extended challenge, participants are tasked to predict the average travel times on super-segments 15 min into the future - super-segments are longer sequences of road segments in the graph. The competition results provide an important advance in the prediction of complex city-wide traffic states just from publicly available sparse vehicle data and without the need for large amounts of real-time floating vehicle data.
Metropolitan Segment Traffic Speeds from Massive Floating Car Data in 10 Cities
Feb 17, 2023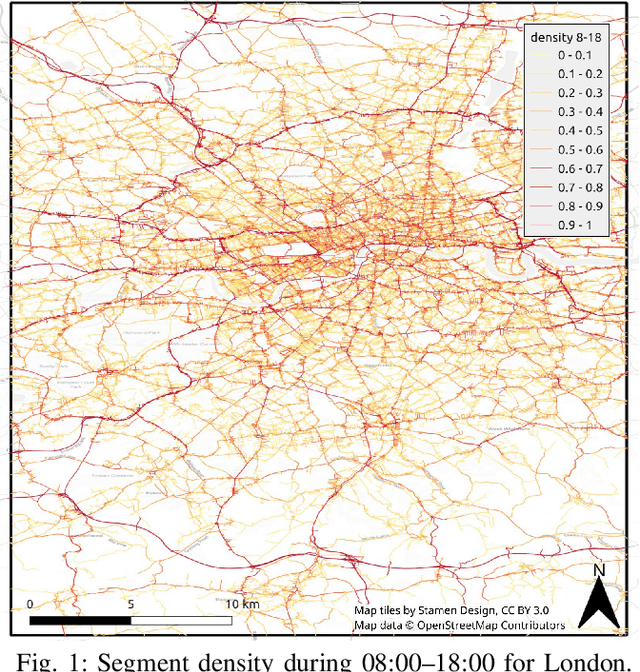
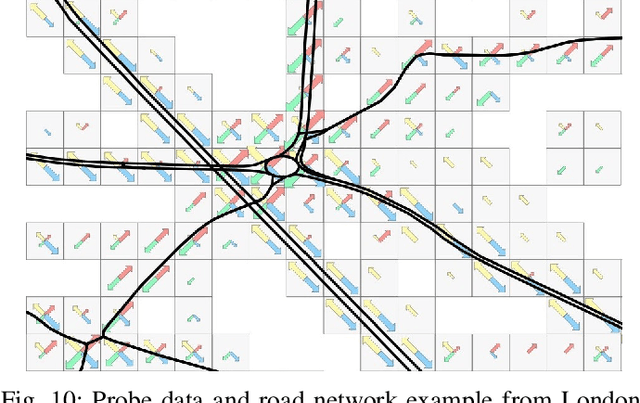
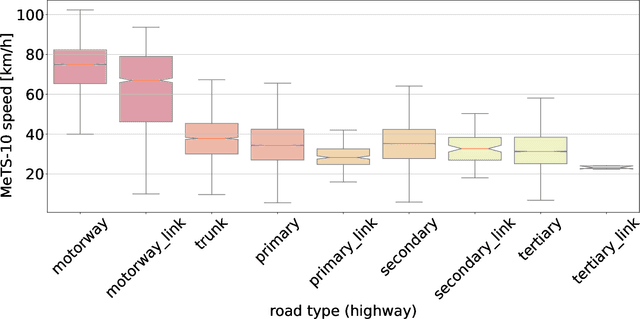
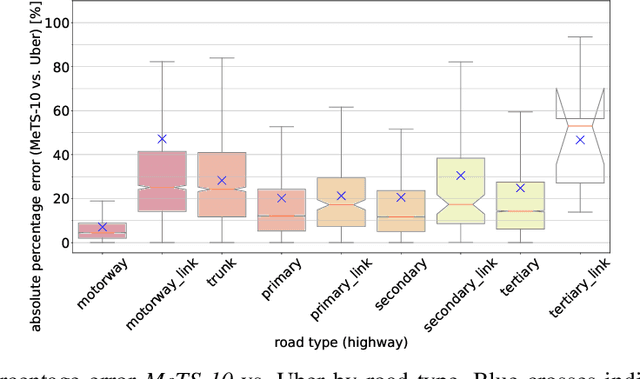
Traffic analysis is crucial for urban operations and planning, while the availability of dense urban traffic data beyond loop detectors is still scarce. We present a large-scale floating vehicle dataset of per-street segment traffic information, Metropolitan Segment Traffic Speeds from Massive Floating Car Data in 10 Cities (MeTS-10), available for 10 global cities with a 15-minute resolution for collection periods ranging between 108 and 361 days in 2019-2021 and covering more than 1500 square kilometers per metropolitan area. MeTS-10 features traffic speed information at all street levels from main arterials to local streets for Antwerp, Bangkok, Barcelona, Berlin, Chicago, Istanbul, London, Madrid, Melbourne and Moscow. The dataset leverages the industrial-scale floating vehicle Traffic4cast data with speeds and vehicle counts provided in a privacy-preserving spatio-temporal aggregation. We detail the efficient matching approach mapping the data to the OpenStreetMap road graph. We evaluate the dataset by comparing it with publicly available stationary vehicle detector data (for Berlin, London, and Madrid) and the Uber traffic speed dataset (for Barcelona, Berlin, and London). The comparison highlights the differences across datasets in spatio-temporal coverage and variations in the reported traffic caused by the binning method. MeTS-10 enables novel, city-wide analysis of mobility and traffic patterns for ten major world cities, overcoming current limitations of spatially sparse vehicle detector data. The large spatial and temporal coverage offers an opportunity for joining the MeTS-10 with other datasets, such as traffic surveys in traffic planning studies or vehicle detector data in traffic control settings.
How do you go where? Improving next location prediction by learning travel mode information using transformers
Oct 08, 2022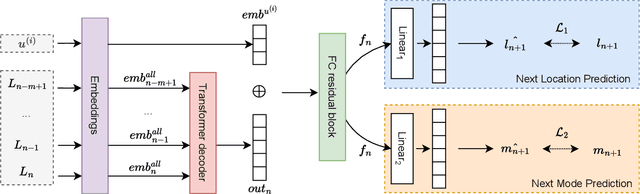
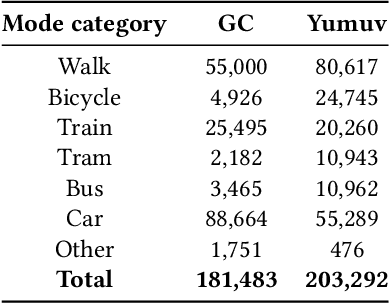
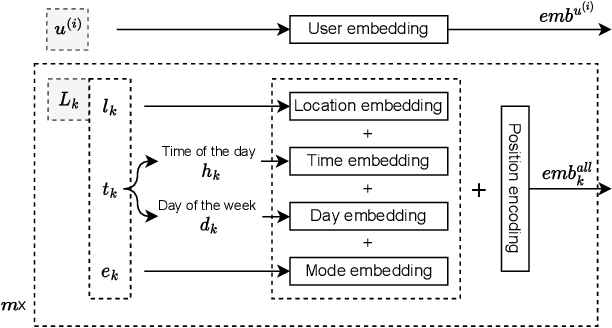
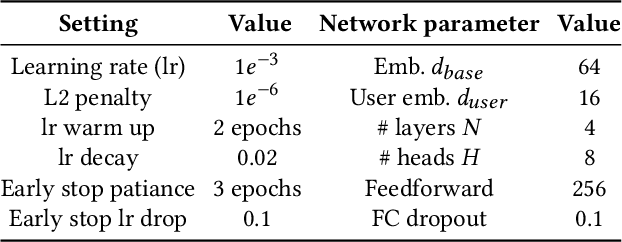
Predicting the next visited location of an individual is a key problem in human mobility analysis, as it is required for the personalization and optimization of sustainable transport options. Here, we propose a transformer decoder-based neural network to predict the next location an individual will visit based on historical locations, time, and travel modes, which are behaviour dimensions often overlooked in previous work. In particular, the prediction of the next travel mode is designed as an auxiliary task to help guide the network's learning. For evaluation, we apply this approach to two large-scale and long-term GPS tracking datasets involving more than 600 individuals. Our experiments show that the proposed method significantly outperforms other state-of-the-art next location prediction methods by a large margin (8.05% and 5.60% relative increase in F1-score for the two datasets, respectively). We conduct an extensive ablation study that quantifies the influence of considering temporal features, travel mode information, and the auxiliary task on the prediction results. Moreover, we experimentally determine the performance upper bound when including the next mode prediction in our model. Finally, our analysis indicates that the performance of location prediction varies significantly with the chosen next travel mode by the individual. These results show potential for a more systematic consideration of additional dimensions of travel behaviour in human mobility prediction tasks. The source code of our model and experiments is available at https://github.com/mie-lab/location-mode-prediction.
Traffic4cast at NeurIPS 2021 -- Temporal and Spatial Few-Shot Transfer Learning in Gridded Geo-Spatial Processes
Apr 01, 2022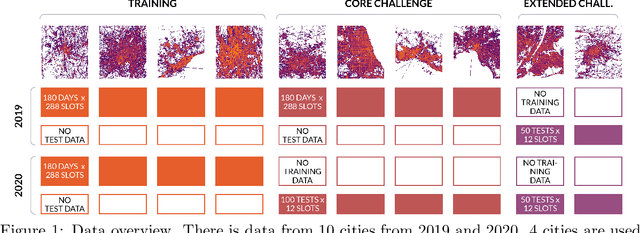
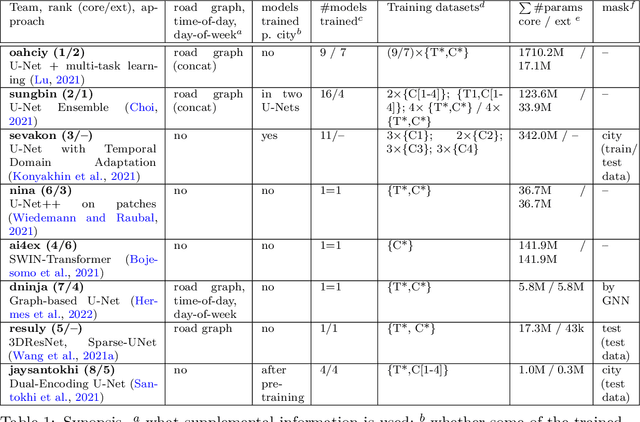

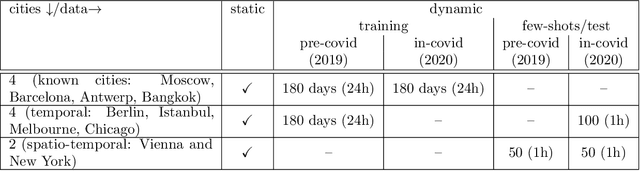
The IARAI Traffic4cast competitions at NeurIPS 2019 and 2020 showed that neural networks can successfully predict future traffic conditions 1 hour into the future on simply aggregated GPS probe data in time and space bins. We thus reinterpreted the challenge of forecasting traffic conditions as a movie completion task. U-Nets proved to be the winning architecture, demonstrating an ability to extract relevant features in this complex real-world geo-spatial process. Building on the previous competitions, Traffic4cast 2021 now focuses on the question of model robustness and generalizability across time and space. Moving from one city to an entirely different city, or moving from pre-COVID times to times after COVID hit the world thus introduces a clear domain shift. We thus, for the first time, release data featuring such domain shifts. The competition now covers ten cities over 2 years, providing data compiled from over 10^12 GPS probe data. Winning solutions captured traffic dynamics sufficiently well to even cope with these complex domain shifts. Surprisingly, this seemed to require only the previous 1h traffic dynamic history and static road graph as input.
Traffic4cast-Traffic Map Movie Forecasting -- Team MIE-Lab
Nov 21, 2019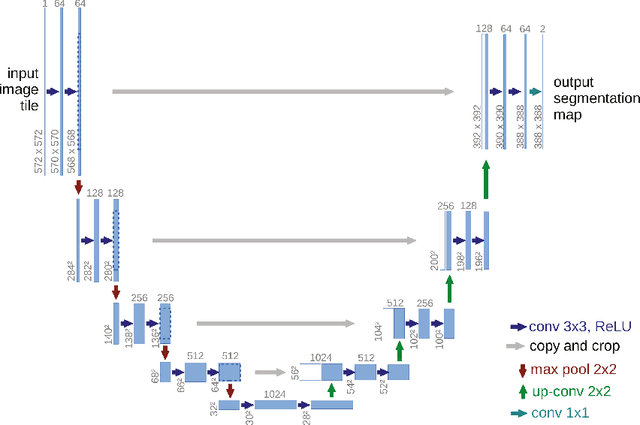

The goal of the IARAI competition traffic4cast was to predict the city-wide traffic status within a 15-minute time window, based on information from the previous hour. The traffic status was given as multi-channel images (one pixel roughly corresponds to 100x100 meters), where one channel indicated the traffic volume, another one the average speed of vehicles, and a third one their rough heading. As part of our work on the competition, we evaluated many different network architectures, analyzed the statistical properties of the given data in detail, and thought about how to transform the problem to be able to take additional spatio-temporal context-information into account, such as the street network, the positions of traffic lights, or the weather. This document summarizes our efforts that led to our best submission, and gives some insights about which other approaches we evaluated, and why they did not work as well as imagined.