 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMetropolitan Segment Traffic Speeds from Massive Floating Car Data in 10 Cities
Feb 17, 2023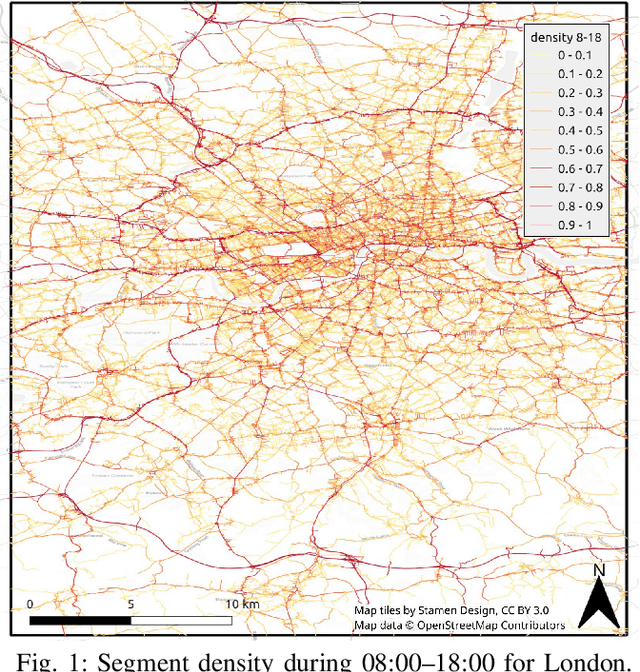
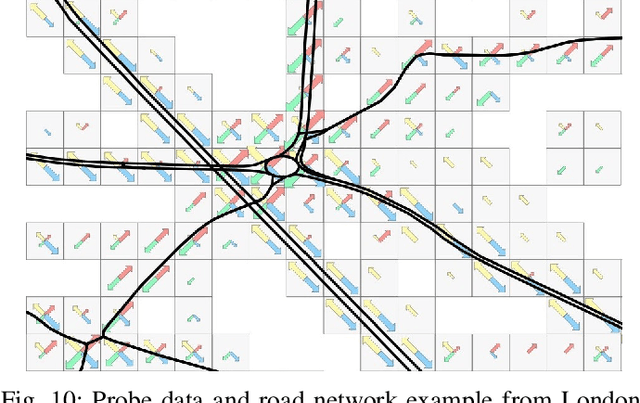
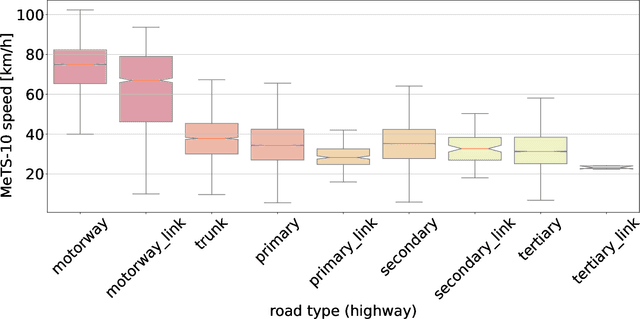
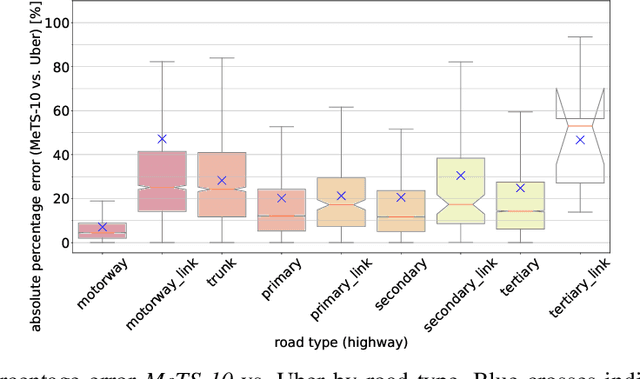
Traffic analysis is crucial for urban operations and planning, while the availability of dense urban traffic data beyond loop detectors is still scarce. We present a large-scale floating vehicle dataset of per-street segment traffic information, Metropolitan Segment Traffic Speeds from Massive Floating Car Data in 10 Cities (MeTS-10), available for 10 global cities with a 15-minute resolution for collection periods ranging between 108 and 361 days in 2019-2021 and covering more than 1500 square kilometers per metropolitan area. MeTS-10 features traffic speed information at all street levels from main arterials to local streets for Antwerp, Bangkok, Barcelona, Berlin, Chicago, Istanbul, London, Madrid, Melbourne and Moscow. The dataset leverages the industrial-scale floating vehicle Traffic4cast data with speeds and vehicle counts provided in a privacy-preserving spatio-temporal aggregation. We detail the efficient matching approach mapping the data to the OpenStreetMap road graph. We evaluate the dataset by comparing it with publicly available stationary vehicle detector data (for Berlin, London, and Madrid) and the Uber traffic speed dataset (for Barcelona, Berlin, and London). The comparison highlights the differences across datasets in spatio-temporal coverage and variations in the reported traffic caused by the binning method. MeTS-10 enables novel, city-wide analysis of mobility and traffic patterns for ten major world cities, overcoming current limitations of spatially sparse vehicle detector data. The large spatial and temporal coverage offers an opportunity for joining the MeTS-10 with other datasets, such as traffic surveys in traffic planning studies or vehicle detector data in traffic control settings.
Time-to-Green predictions for fully-actuated signal control systems with supervised learning
Aug 24, 2022
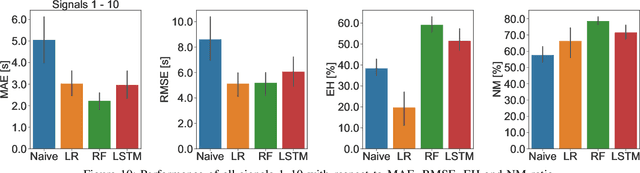
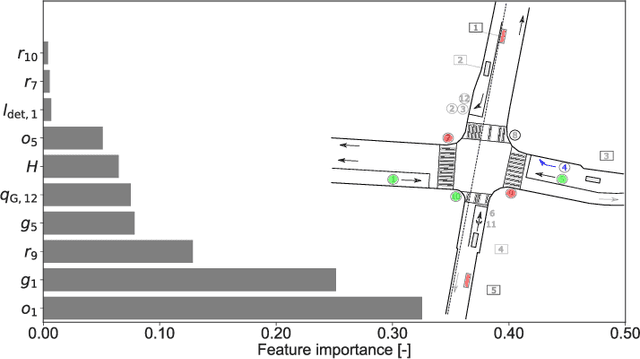
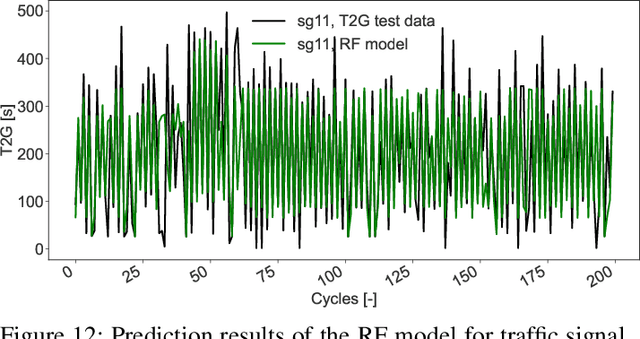
Recently, efforts have been made to standardize signal phase and timing (SPaT) messages. These messages contain signal phase timings of all signalized intersection approaches. This information can thus be used for efficient motion planning, resulting in more homogeneous traffic flows and uniform speed profiles. Despite efforts to provide robust predictions for semi-actuated signal control systems, predicting signal phase timings for fully-actuated controls remains challenging. This paper proposes a time series prediction framework using aggregated traffic signal and loop detector data. We utilize state-of-the-art machine learning models to predict future signal phases' duration. The performance of a Linear Regression (LR), a Random Forest (RF), and a Long-Short-Term-Memory (LSTM) neural network are assessed against a naive baseline model. Results based on an empirical data set from a fully-actuated signal control system in Zurich, Switzerland, show that machine learning models outperform conventional prediction methods. Furthermore, tree-based decision models such as the RF perform best with an accuracy that meets requirements for practical applications.