 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNetwork-Wide Traffic Flow Estimation Across Multiple Cities with Global Open Multi-Source Data: A Large-Scale Case Study in Europe and North America
Feb 06, 2025Network-wide traffic flow, which captures dynamic traffic volume on each link of a general network, is fundamental to smart mobility applications. However, the observed traffic flow from sensors is usually limited across the entire network due to the associated high installation and maintenance costs. To address this issue, existing research uses various supplementary data sources to compensate for insufficient sensor coverage and estimate the unobserved traffic flow. Although these studies have shown promising results, the inconsistent availability and quality of supplementary data across cities make their methods typically face a trade-off challenge between accuracy and generality. In this research, we first time advocate using the Global Open Multi-Source (GOMS) data within an advanced deep learning framework to break the trade-off. The GOMS data primarily encompass geographical and demographic information, including road topology, building footprints, and population density, which can be consistently collected across cities. More importantly, these GOMS data are either causes or consequences of transportation activities, thereby creating opportunities for accurate network-wide flow estimation. Furthermore, we use map images to represent GOMS data, instead of traditional tabular formats, to capture richer and more comprehensive geographical and demographic information. To address multi-source data fusion, we develop an attention-based graph neural network that effectively extracts and synthesizes information from GOMS maps while simultaneously capturing spatiotemporal traffic dynamics from observed traffic data. A large-scale case study across 15 cities in Europe and North America was conducted. The results demonstrate stable and satisfactory estimation accuracy across these cities, which suggests that the trade-off challenge can be successfully addressed using our approach.
Urban traffic analysis and forecasting through shared Koopman eigenmodes
Sep 07, 2024



Predicting traffic flow in data-scarce cities is challenging due to limited historical data. To address this, we leverage transfer learning by identifying periodic patterns common to data-rich cities using a customized variant of Dynamic Mode Decomposition (DMD): constrained Hankelized DMD (TrHDMD). This method uncovers common eigenmodes (urban heartbeats) in traffic patterns and transfers them to data-scarce cities, significantly enhancing prediction performance. TrHDMD reduces the need for extensive training datasets by utilizing prior knowledge from other cities. By applying Koopman operator theory to multi-city loop detector data, we identify stable, interpretable, and time-invariant traffic modes. Injecting ``urban heartbeats'' into forecasting tasks improves prediction accuracy and has the potential to enhance traffic management strategies for cities with varying data infrastructures. Our work introduces cross-city knowledge transfer via shared Koopman eigenmodes, offering actionable insights and reliable forecasts for data-scarce urban environments.
Time-to-Green predictions for fully-actuated signal control systems with supervised learning
Aug 24, 2022
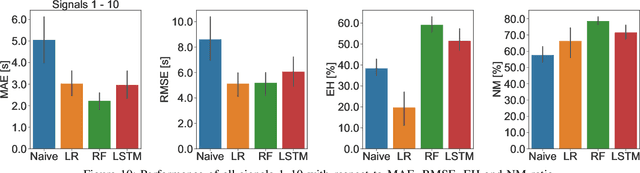
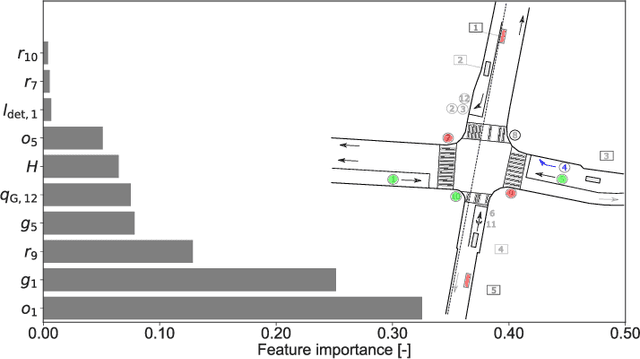
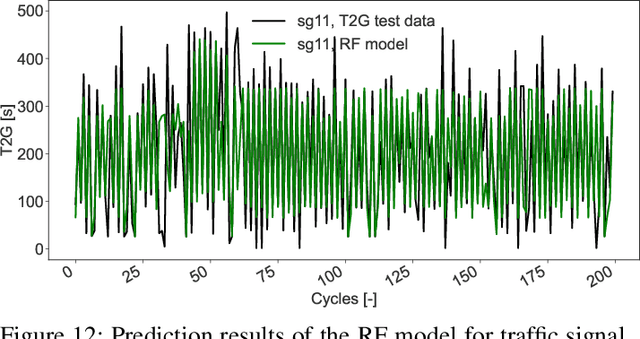
Recently, efforts have been made to standardize signal phase and timing (SPaT) messages. These messages contain signal phase timings of all signalized intersection approaches. This information can thus be used for efficient motion planning, resulting in more homogeneous traffic flows and uniform speed profiles. Despite efforts to provide robust predictions for semi-actuated signal control systems, predicting signal phase timings for fully-actuated controls remains challenging. This paper proposes a time series prediction framework using aggregated traffic signal and loop detector data. We utilize state-of-the-art machine learning models to predict future signal phases' duration. The performance of a Linear Regression (LR), a Random Forest (RF), and a Long-Short-Term-Memory (LSTM) neural network are assessed against a naive baseline model. Results based on an empirical data set from a fully-actuated signal control system in Zurich, Switzerland, show that machine learning models outperform conventional prediction methods. Furthermore, tree-based decision models such as the RF perform best with an accuracy that meets requirements for practical applications.
Learning Traffic Speed Dynamics from Visualizations
May 04, 2021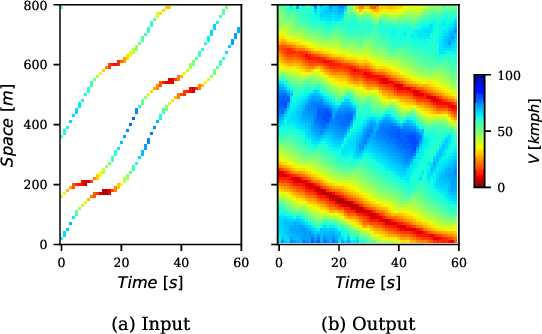

Space-time visualizations of macroscopic or microscopic traffic variables is a qualitative tool used by traffic engineers to understand and analyze different aspects of road traffic dynamics. We present a deep learning method to learn the macroscopic traffic speed dynamics from these space-time visualizations, and demonstrate its application in the framework of traffic state estimation. Compared to existing estimation approaches, our approach allows a finer estimation resolution, eliminates the dependence on the initial conditions, and is agnostic to external factors such as traffic demand, road inhomogeneities and driving behaviors. Our model respects causality in traffic dynamics, which improves the robustness of estimation. We present the high-resolution traffic speed fields estimated for several freeway sections using the data obtained from the Next Generation Simulation Program (NGSIM) and German Highway (HighD) datasets. We further demonstrate the quality and utility of the estimation by inferring vehicle trajectories from the estimated speed fields, and discuss the benefits of deep neural network models in approximating the traffic dynamics.
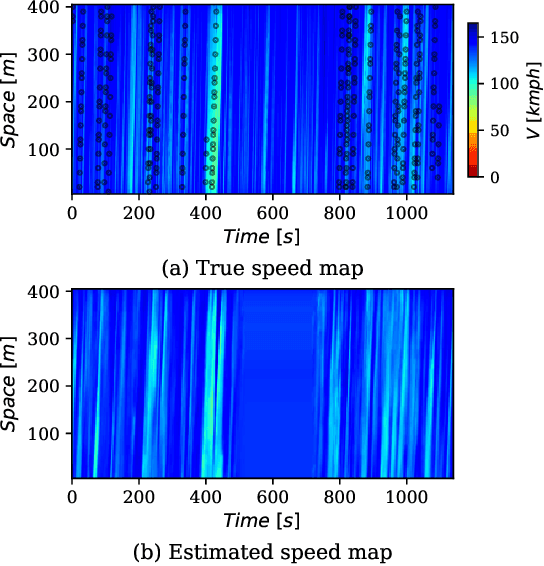
Incorporating Kinematic Wave Theory into a Deep Learning Method for High-Resolution Traffic Speed Estimation
Feb 04, 2021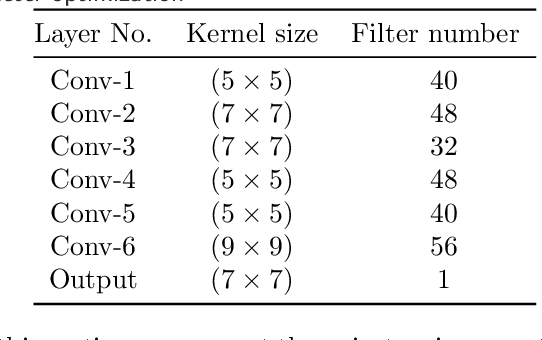
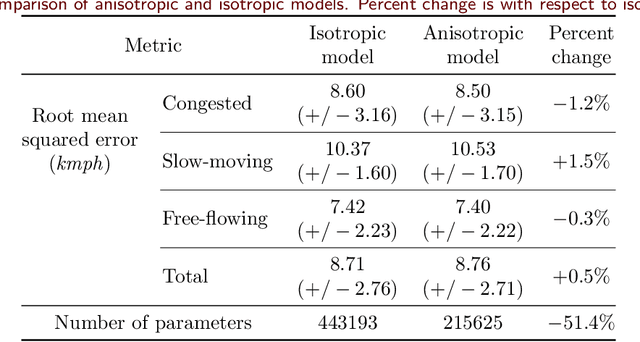
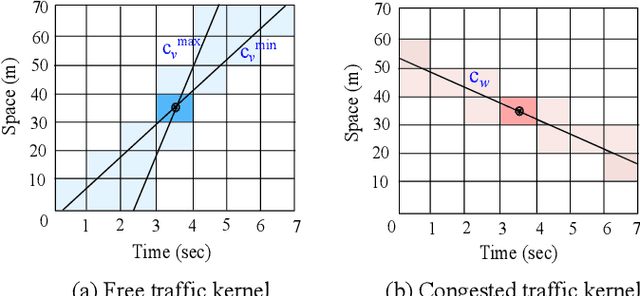

We propose a kinematic wave based Deep Convolutional Neural Network (Deep CNN) to estimate high resolution traffic speed dynamics from sparse probe vehicle trajectories. To that end, we introduce two key approaches that allow us to incorporate kinematic wave theory principles to improve the robustness of existing learning-based estimation methods. First, we use an anisotropic traffic-based kernel for the CNN. This kernel is designed to explicitly take forward and backward traffic wave propagation characteristics into account during reconstruction in the space-time domain. Second, we use simulated data for training the CNN. This implicitly imposes physical constraints on the patterns learned by the CNN, providing an alternate, unrestricted way to integrate complex traffic behaviors into learning models. We present the speed fields estimated using the anisotropic kernel and highlight its advantages over its isotropic counterpart in terms of predicting shockwave dynamics. Furthermore, we test the transferability of the trained model to real traffic by using two datasets: the Next Generation Simulation (NGSIM) program and the Highway Drone (HighD) dataset. Finally, we present an ensemble version of the CNN that allows us to handle multiple (and unknown) probe vehicle penetration rates. The results demonstrate that anisotropic kernels can reduce model complexity while improving the correctness of the estimation, and that simulation-based training is a viable alternative to model fitting using real-world data. This suggests that exploiting prior traffic knowledge adds value to learning-based estimation methods, and that there is great potential in exploring broader approaches to do so.
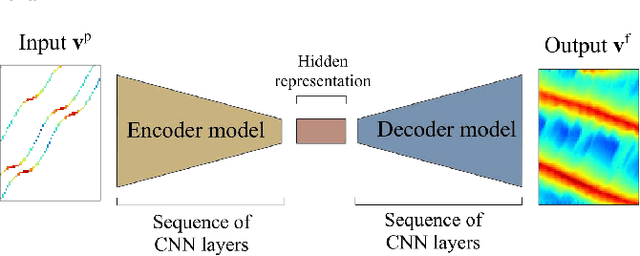
Traffic Data Imputation using Deep Convolutional Neural Networks
Jan 21, 2020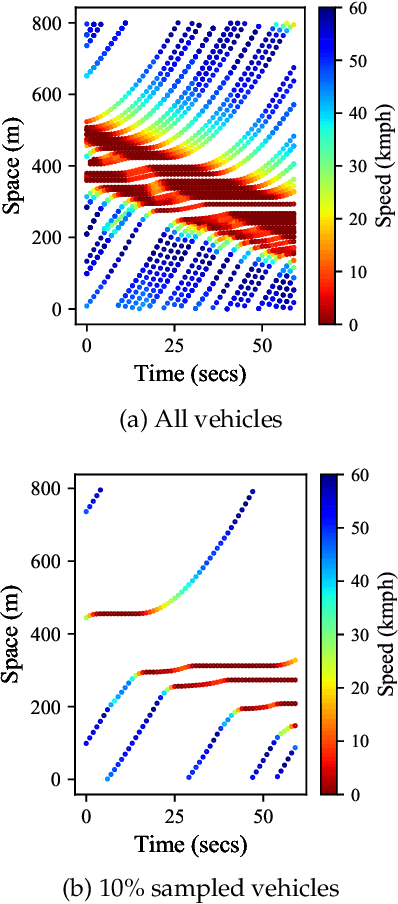
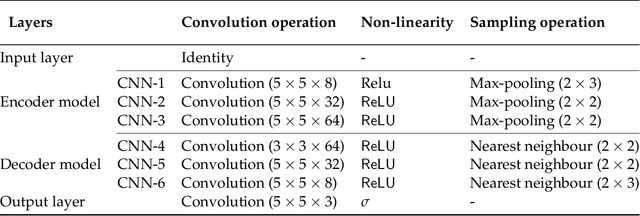
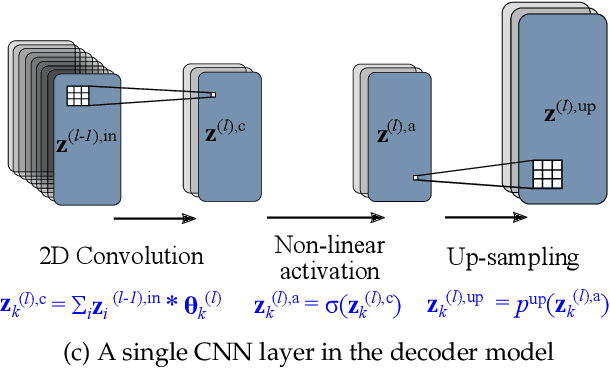
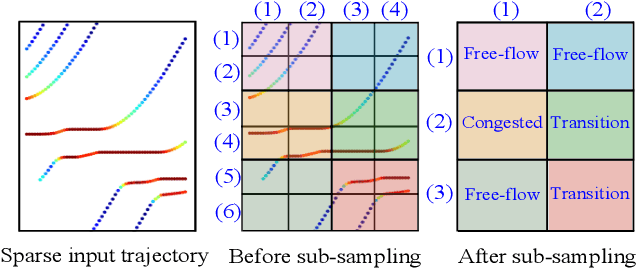
We propose a statistical learning-based traffic speed estimation method that uses sparse vehicle trajectory information. Using a convolutional encoder-decoder based architecture, we show that a well trained neural network can learn spatio-temporal traffic speed dynamics from time-space diagrams. We demonstrate this for a homogeneous road section using simulated vehicle trajectories and then validate it using real-world data from NGSIM. Our results show that with probe vehicle penetration levels as low as 5\%, the proposed estimation method can provide a sound reconstruction of macroscopic traffic speeds and reproduce realistic shockwave patterns, implying applicability in a variety of traffic conditions. We further discuss the model's reconstruction mechanisms and confirm its ability to differentiate various traffic behaviors such as congested and free-flow traffic states, transition dynamics, and shockwave propagation.