 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime-to-Green predictions for fully-actuated signal control systems with supervised learning
Aug 24, 2022
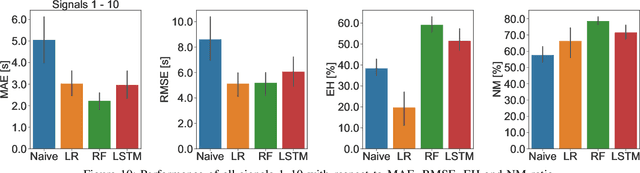
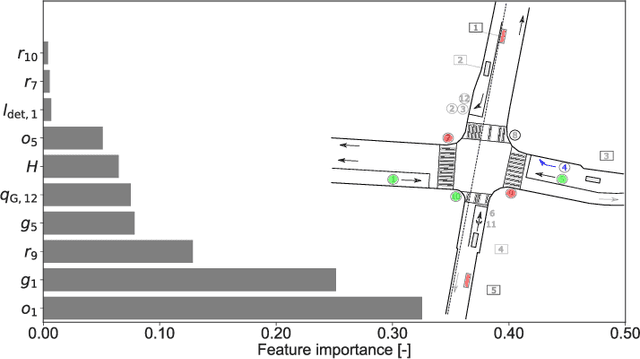
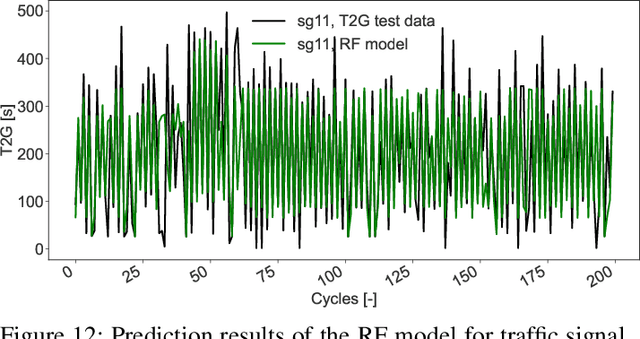
Recently, efforts have been made to standardize signal phase and timing (SPaT) messages. These messages contain signal phase timings of all signalized intersection approaches. This information can thus be used for efficient motion planning, resulting in more homogeneous traffic flows and uniform speed profiles. Despite efforts to provide robust predictions for semi-actuated signal control systems, predicting signal phase timings for fully-actuated controls remains challenging. This paper proposes a time series prediction framework using aggregated traffic signal and loop detector data. We utilize state-of-the-art machine learning models to predict future signal phases' duration. The performance of a Linear Regression (LR), a Random Forest (RF), and a Long-Short-Term-Memory (LSTM) neural network are assessed against a naive baseline model. Results based on an empirical data set from a fully-actuated signal control system in Zurich, Switzerland, show that machine learning models outperform conventional prediction methods. Furthermore, tree-based decision models such as the RF perform best with an accuracy that meets requirements for practical applications.
An Experimental Urban Case Study with Various Data Sources and a Model for Traffic Estimation
Aug 02, 2021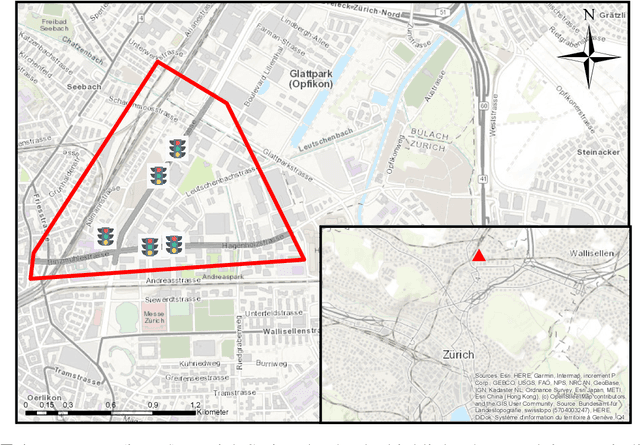
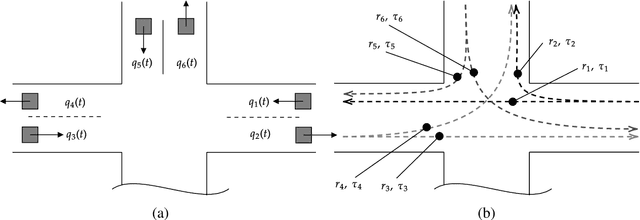

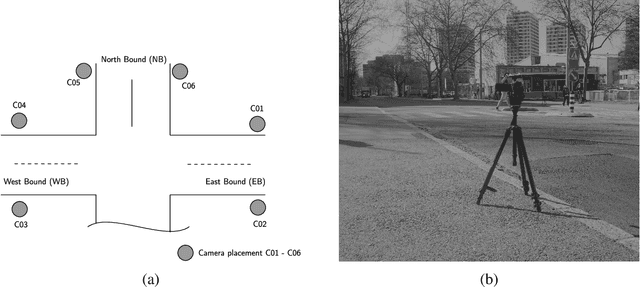
Accurate estimation of the traffic state over a network is essential since it is the starting point for designing and implementing any traffic management strategy. Hence, traffic operators and users of a transportation network can make reliable decisions such as influence/change route or mode choice. However, the problem of traffic state estimation from various sensors within an urban environment is very complex for several different reasons, such as availability of sensors, different noise levels, different output quantities, sensor accuracy, heterogeneous data fusion, and many more. To provide a better understanding of this problem, we organized an experimental campaign with video measurement in an area within the urban network of Zurich, Switzerland. We focus on capturing the traffic state in terms of traffic flow and travel times by ensuring measurements from established thermal cameras by the city's authorities, processed video data, and the Google Distance Matrix. We assess the different data sources, and we propose a simple yet efficient Multiple Linear Regression (MLR) model to estimate travel times with fusion of various data sources. Comparative results with ground-truth data (derived from video measurements) show the efficiency and robustness of the proposed methodology.
Critical ride comfort detection for automated vehicles
Jul 27, 2021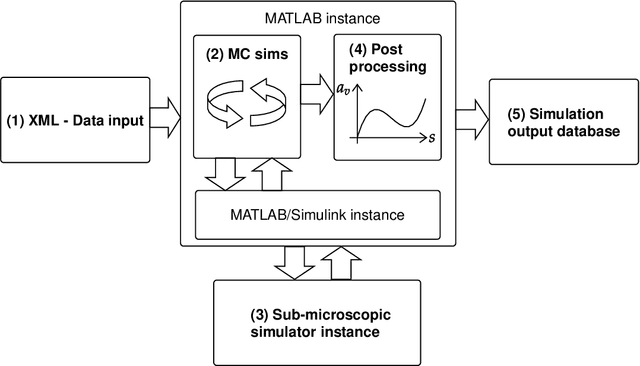
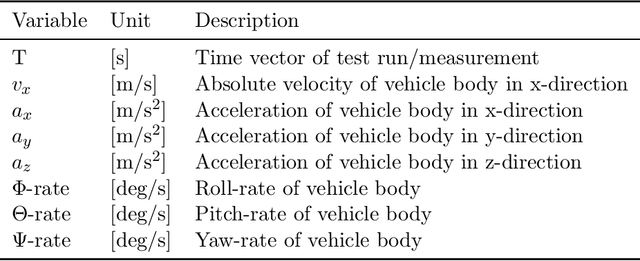

In a future connected vehicle environment, an optimized route and motion planning should not only fulfill efficiency and safety constraints but also minimize vehicle motions and oscillations, causing poor ride comfort perceived by passengers. This work provides a framework for a large-scale and cost-efficient evaluation to address AV's ride comfort and allow the comparison of different comfort assessment strategies. The proposed tool also gives insights to comfort data, allowing for the development of novel algorithms, guidelines, or motion planning systems incorporating passenger comfort. A vehicle-road simulation framework utilizable to assess the most common ride comfort determination strategies based on vehicle dynamics data is presented. The developed methodology encompasses a road surface model, a non-linear vehicle model optimization, and Monte Carlo simulations to allow for an accurate and cost-efficient generation of virtual chassis acceleration data. Ride comfort is determined by applying a commonly used threshold method and an analysis based on ISO 2631. The two methods are compared against comfort classifications based on empirical measurements of the International Roughness Index (IRI). A case study with three road sites in Austria demonstrates the framework's practical application with real data and achieves high-resolution ride comfort classifications. The results highlight that ISO 2631 comfort estimates are most similar to IRI classifications and that the thresholding procedure detects preventable situations but also over- or underestimates ride comfort. Hence, the work shows the potential risk of negative ride comfort of AVs using simple threshold values and stresses the importance of a robust comfort evaluation method for enhancing AVs' path and motion planning with maximal ride comfort.
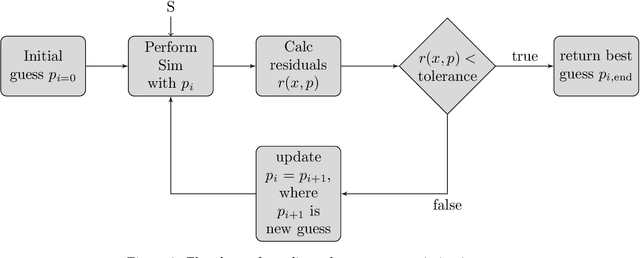
Dynamic optimal congestion pricing in multi-region urban networks by application of a Multi-Layer-Neural network
Jul 27, 2021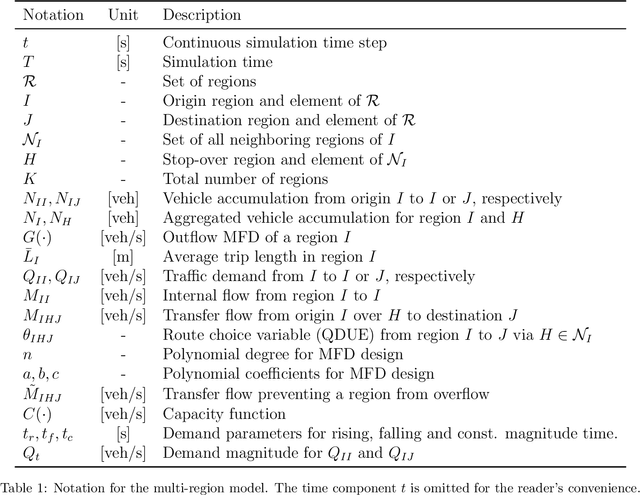
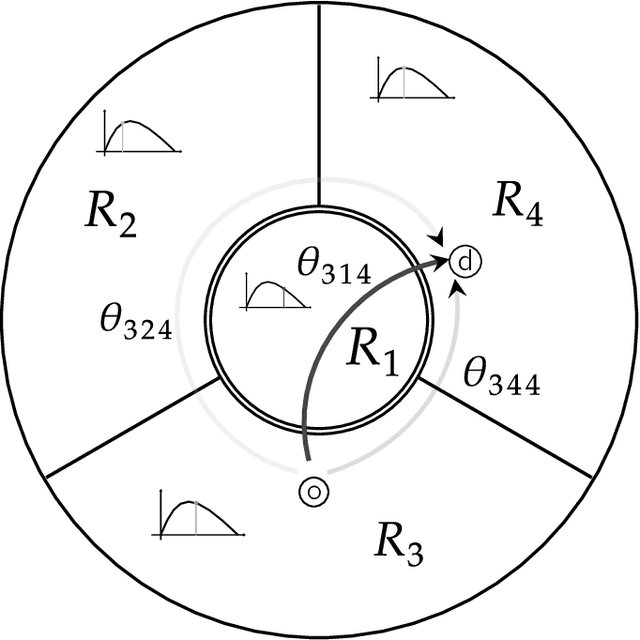
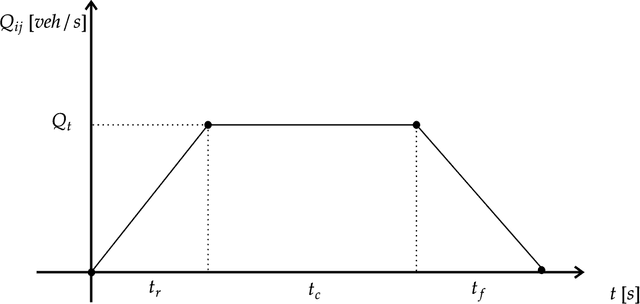
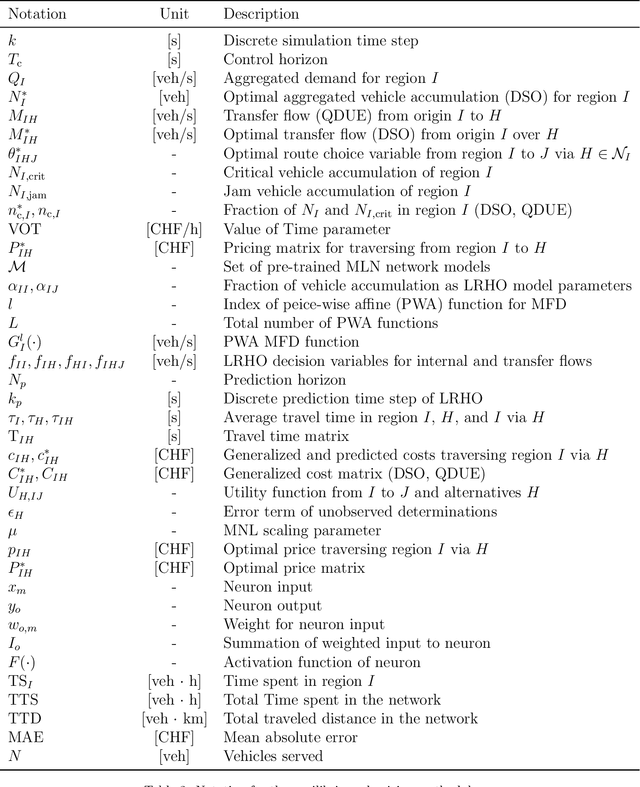
Traffic management by applying congestion pricing is a measure for mitigating congestion in protected city corridors. As a promising tool, pricing improves the level of service in a network and reduces travel delays. However, real-world implementations are restricted to static pricing, i.e., the price is fixed and not responsive to the prevailing regional traffic conditions. Dynamic pricing overcomes these limitations but also affects the users route choices. This work uses dynamic pricing's influence and predicts pricing functions to aim for a system optimal traffic distribution. The framework models a large-scale network where every region is considered homogeneous, allowing for the Macroscopic Fundamental Diagram (MFD) application. We compute Dynamic System Optimum (DSO) and a Quasi Dynamic User Equilibrium (QDUE) of the macroscopic model by formulating a linear optimization problem and utilizing the Dijkstra algorithm and a Multinomial Logit model (MNL), respectively. The equilibria allow us to find an optimal pricing methodology by training Multi-Layer-Neural (MLN) network models. We test our framework on a case study in Zurich, Switzerland, and showcase that (a) our neural network model learns the complex user behavior and (b) allows predicting optimal pricing functions. Results show a significant performance improvement when operating a transportation network in the DSO and highlight how dynamic pricing influences the user's route choice behavior towards the system optimal equilibrium.