 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVirtual Traffic Police: Large Language Model-Augmented Traffic Signal Control for Unforeseen Incidents
Jan 22, 2026Adaptive traffic signal control (TSC) has demonstrated strong effectiveness in managing dynamic traffic flows. However, conventional methods often struggle when unforeseen traffic incidents occur (e.g., accidents and road maintenance), which typically require labor-intensive and inefficient manual interventions by traffic police officers. Large Language Models (LLMs) appear to be a promising solution thanks to their remarkable reasoning and generalization capabilities. Nevertheless, existing works often propose to replace existing TSC systems with LLM-based systems, which can be (i) unreliable due to the inherent hallucinations of LLMs and (ii) costly due to the need for system replacement. To address the issues of existing works, we propose a hierarchical framework that augments existing TSC systems with LLMs, whereby a virtual traffic police agent at the upper level dynamically fine-tunes selected parameters of signal controllers at the lower level in response to real-time traffic incidents. To enhance domain-specific reliability in response to unforeseen traffic incidents, we devise a self-refined traffic language retrieval system (TLRS), whereby retrieval-augmented generation is employed to draw knowledge from a tailored traffic language database that encompasses traffic conditions and controller operation principles. Moreover, we devise an LLM-based verifier to update the TLRS continuously over the reasoning process. Our results show that LLMs can serve as trustworthy virtual traffic police officers that can adapt conventional TSC methods to unforeseen traffic incidents with significantly improved operational efficiency and reliability.
Interaction-Aware Trajectory Prediction for Safe Motion Planning in Autonomous Driving: A Transformer-Transfer Learning Approach
Nov 03, 2024



A critical aspect of safe and efficient motion planning for autonomous vehicles (AVs) is to handle the complex and uncertain behavior of surrounding human-driven vehicles (HDVs). Despite intensive research on driver behavior prediction, existing approaches typically overlook the interactions between AVs and HDVs assuming that HDV trajectories are not affected by AV actions. To address this gap, we present a transformer-transfer learning-based interaction-aware trajectory predictor for safe motion planning of autonomous driving, focusing on a vehicle-to-vehicle (V2V) interaction scenario consisting of an AV and an HDV. Specifically, we construct a transformer-based interaction-aware trajectory predictor using widely available datasets of HDV trajectory data and further transfer the learned predictor using a small set of AV-HDV interaction data. Then, to better incorporate the proposed trajectory predictor into the motion planning module of AVs, we introduce an uncertainty quantification method to characterize the errors of the predictor, which are integrated into the path-planning process. Our experimental results demonstrate the value of explicitly considering interactions and handling uncertainties.
A Parameter Privacy-Preserving Strategy for Mixed-Autonomy Platoon Control
Jan 28, 2024It has been demonstrated that leading cruise control (LCC) can improve the operation of mixed-autonomy platoons by allowing connected and automated vehicles (CAVs) to make longitudinal control decisions based on the information provided by surrounding vehicles. However, LCC generally requires surrounding human-driven vehicles (HDVs) to share their real-time states, which can be used by adversaries to infer drivers' car-following behavior, potentially leading to financial losses or safety concerns. This paper aims to address such privacy concerns and protect the behavioral characteristics of HDVs by devising a parameter privacy-preserving approach for mixed-autonomy platoon control. First, we integrate a parameter privacy filter into LCC to protect sensitive car-following parameters. The privacy filter allows each vehicle to generate seemingly realistic pseudo states by distorting the true parameters to pseudo parameters, which can protect drivers' privacy in behavioral parameters without significantly influencing the control performance. Second, to enhance the practicality and reliability of the privacy filter within LCC, we first extend the current approach to accommodate continuous parameter spaces through a neural network estimator. Subsequently, we introduce an individual-level parameter privacy preservation constraint, focusing on the privacy level of each individual parameter pair, further enhancing the approach's reliability. Third, analysis of head-to-tail string stability reveals the potential impact of privacy filters in degrading mixed traffic flow performance. Simulation shows that this approach can effectively trade off privacy and control performance in LCC. We further demonstrate the benefit of such an approach in networked systems, i.e., by applying the privacy filter to a proceeding vehicle, one can also achieve a certain level of privacy for the following vehicle.
Control-Aware Trajectory Predictions for Communication-Efficient Drone Swarm Coordination in Cluttered Environments
Jan 23, 2024



Swarms of Unmanned Aerial Vehicles (UAV) have demonstrated enormous potential in many industrial and commercial applications. However, before deploying UAVs in the real world, it is essential to ensure they can operate safely in complex environments, especially with limited communication capabilities. To address this challenge, we propose a control-aware learning-based trajectory prediction algorithm that can enable communication-efficient UAV swarm control in a cluttered environment. Specifically, our proposed algorithm can enable each UAV to predict the planned trajectories of its neighbors in scenarios with various levels of communication capabilities. The predicted planned trajectories will serve as input to a distributed model predictive control (DMPC) approach. The proposed algorithm combines (1) a trajectory compression and reconstruction model based on Variational Auto-Encoder, (2) a trajectory prediction model based on EvolveGCN, a graph convolutional network (GCN) that can handle dynamic graphs, and (3) a KKT-informed training approach that applies the Karush-Kuhn-Tucker (KKT) conditions in the training process to encode DMPC information into the trained neural network. We evaluate our proposed algorithm in a funnel-like environment. Results show that the proposed algorithm outperforms state-of-the-art benchmarks, providing close-to-optimal control performance and robustness to limited communication capabilities and measurement noises.
Privacy-Preserving Data Fusion for Traffic State Estimation: A Vertical Federated Learning Approach
Jan 22, 2024This paper proposes a privacy-preserving data fusion method for traffic state estimation (TSE). Unlike existing works that assume all data sources to be accessible by a single trusted party, we explicitly address data privacy concerns that arise in the collaboration and data sharing between multiple data owners, such as municipal authorities (MAs) and mobility providers (MPs). To this end, we propose a novel vertical federated learning (FL) approach, FedTSE, that enables multiple data owners to collaboratively train and apply a TSE model without having to exchange their private data. To enhance the applicability of the proposed FedTSE in common TSE scenarios with limited availability of ground-truth data, we further propose a privacy-preserving physics-informed FL approach, i.e., FedTSE-PI, that integrates traffic models into FL. Real-world data validation shows that the proposed methods can protect privacy while yielding similar accuracy to the oracle method without privacy considerations.
Graph Reinforcement Learning for Network Control via Bi-Level Optimization
May 16, 2023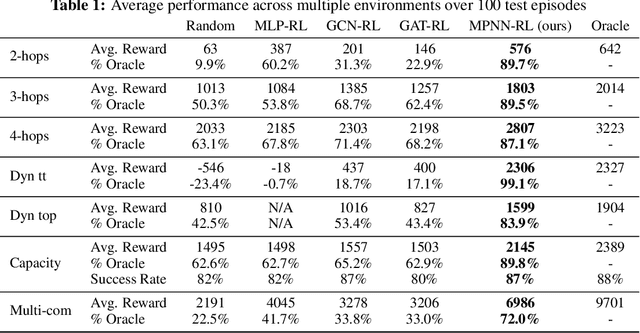
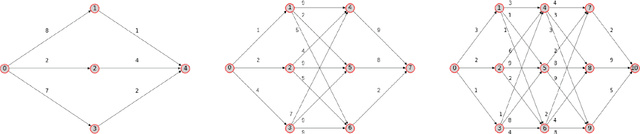
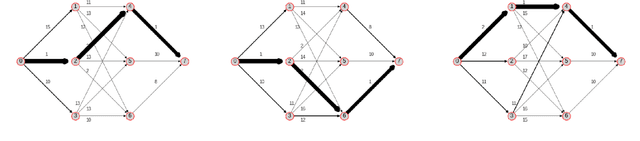
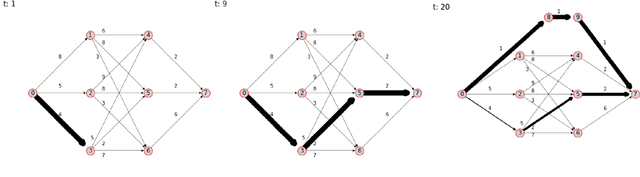
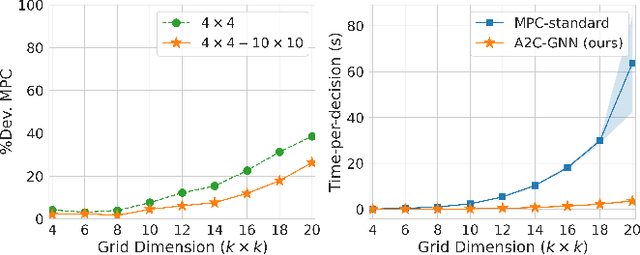
Optimization problems over dynamic networks have been extensively studied and widely used in the past decades to formulate numerous real-world problems. However, (1) traditional optimization-based approaches do not scale to large networks, and (2) the design of good heuristics or approximation algorithms often requires significant manual trial-and-error. In this work, we argue that data-driven strategies can automate this process and learn efficient algorithms without compromising optimality. To do so, we present network control problems through the lens of reinforcement learning and propose a graph network-based framework to handle a broad class of problems. Instead of naively computing actions over high-dimensional graph elements, e.g., edges, we propose a bi-level formulation where we (1) specify a desired next state via RL, and (2) solve a convex program to best achieve it, leading to drastically improved scalability and performance. We further highlight a collection of desirable features to system designers, investigate design decisions, and present experiments on real-world control problems showing the utility, scalability, and flexibility of our framework.
Time-to-Green predictions for fully-actuated signal control systems with supervised learning
Aug 24, 2022
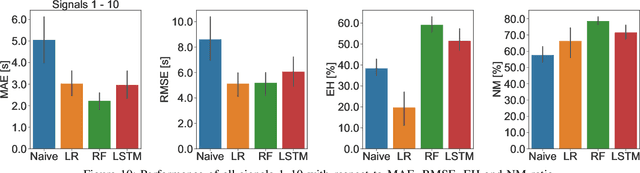
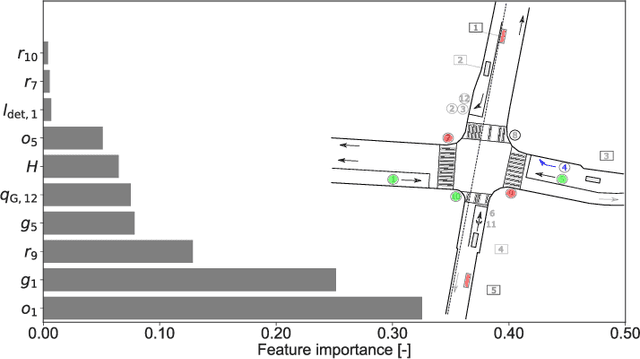
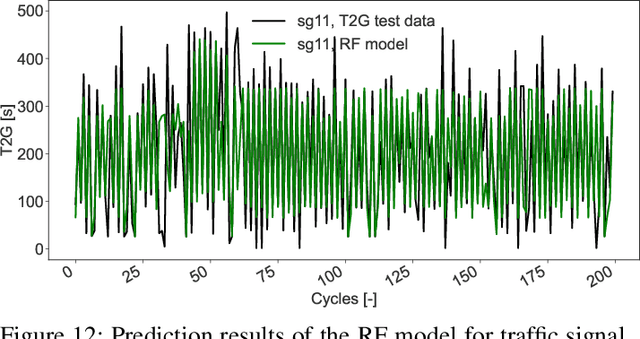
Recently, efforts have been made to standardize signal phase and timing (SPaT) messages. These messages contain signal phase timings of all signalized intersection approaches. This information can thus be used for efficient motion planning, resulting in more homogeneous traffic flows and uniform speed profiles. Despite efforts to provide robust predictions for semi-actuated signal control systems, predicting signal phase timings for fully-actuated controls remains challenging. This paper proposes a time series prediction framework using aggregated traffic signal and loop detector data. We utilize state-of-the-art machine learning models to predict future signal phases' duration. The performance of a Linear Regression (LR), a Random Forest (RF), and a Long-Short-Term-Memory (LSTM) neural network are assessed against a naive baseline model. Results based on an empirical data set from a fully-actuated signal control system in Zurich, Switzerland, show that machine learning models outperform conventional prediction methods. Furthermore, tree-based decision models such as the RF perform best with an accuracy that meets requirements for practical applications.
Graph Neural Network Reinforcement Learning for Autonomous Mobility-on-Demand Systems
Apr 23, 2021

Autonomous mobility-on-demand (AMoD) systems represent a rapidly developing mode of transportation wherein travel requests are dynamically handled by a coordinated fleet of robotic, self-driving vehicles. Given a graph representation of the transportation network - one where, for example, nodes represent areas of the city, and edges the connectivity between them - we argue that the AMoD control problem is naturally cast as a node-wise decision-making problem. In this paper, we propose a deep reinforcement learning framework to control the rebalancing of AMoD systems through graph neural networks. Crucially, we demonstrate that graph neural networks enable reinforcement learning agents to recover behavior policies that are significantly more transferable, generalizable, and scalable than policies learned through other approaches. Empirically, we show how the learned policies exhibit promising zero-shot transfer capabilities when faced with critical portability tasks such as inter-city generalization, service area expansion, and adaptation to potentially complex urban topologies.