 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulation-Informed Diffusion for Decentralized Multi-robot Motion Planning
May 26, 2026Decentralized multi-robot motion planning requires each robot to generate collision-free trajectories from local observations, without global sensing or reliable communication. However, most existing planners, whether classical or learning-based, generate trajectories from a static snapshot of the local observation, which limits their ability to anticipate the future behavior of neighboring robots. This limitation is critical as the number of robots increases and the environment becomes more cluttered. To overcome this challenge, this paper introduces Simulation-Informed Diffusion (SID), a decentralized framework built on constraint-aware diffusion models (CADM). SID first uses CADM to simulate the future trajectories of neighboring robots from their currently observed states, and then uses the same CADM to plan each robot's own trajectory under safety constraints informed by these simulations. Crucially, the accurate simulation of neighbors enables a minimal communication scheme that triggers coordination only when necessary in highly congested scenarios. Experiments across diverse environments show that SID consistently outperforms baseline methods in terms of planning effectiveness and constraint satisfaction, and scales to scenarios with 108 robots and 160 obstacles.
Discrete-Guided Diffusion for Scalable and Safe Multi-Robot Motion Planning
Aug 27, 2025



Multi-Robot Motion Planning (MRMP) involves generating collision-free trajectories for multiple robots operating in a shared continuous workspace. While discrete multi-agent path finding (MAPF) methods are broadly adopted due to their scalability, their coarse discretization severely limits trajectory quality. In contrast, continuous optimization-based planners offer higher-quality paths but suffer from the curse of dimensionality, resulting in poor scalability with respect to the number of robots. This paper tackles the limitations of these two approaches by introducing a novel framework that integrates discrete MAPF solvers with constrained generative diffusion models. The resulting framework, called Discrete-Guided Diffusion (DGD), has three key characteristics: (1) it decomposes the original nonconvex MRMP problem into tractable subproblems with convex configuration spaces, (2) it combines discrete MAPF solutions with constrained optimization techniques to guide diffusion models capture complex spatiotemporal dependencies among robots, and (3) it incorporates a lightweight constraint repair mechanism to ensure trajectory feasibility. The proposed method sets a new state-of-the-art performance in large-scale, complex environments, scaling to 100 robots while achieving planning efficiency and high success rates.
Gen-DFL: Decision-Focused Generative Learning for Robust Decision Making
Feb 08, 2025
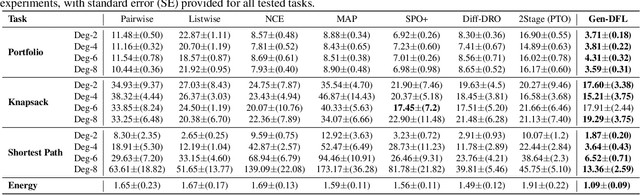


Decision-focused learning (DFL) integrates predictive models with downstream optimization, directly training machine learning models to minimize decision errors. While DFL has been shown to provide substantial advantages when compared to a counterpart that treats the predictive and prescriptive models separately, it has also been shown to struggle in high-dimensional and risk-sensitive settings, limiting its applicability in real-world settings. To address this limitation, this paper introduces decision-focused generative learning (Gen-DFL), a novel framework that leverages generative models to adaptively model uncertainty and improve decision quality. Instead of relying on fixed uncertainty sets, Gen-DFL learns a structured representation of the optimization parameters and samples from the tail regions of the learned distribution to enhance robustness against worst-case scenarios. This approach mitigates over-conservatism while capturing complex dependencies in the parameter space. The paper shows, theoretically, that Gen-DFL achieves improved worst-case performance bounds compared to traditional DFL. Empirically, it evaluates Gen-DFL on various scheduling and logistics problems, demonstrating its strong performance against existing DFL methods.
Simultaneous Multi-Robot Motion Planning with Projected Diffusion Models
Feb 05, 2025



Recent advances in diffusion models hold significant potential in robotics, enabling the generation of diverse and smooth trajectories directly from raw representations of the environment. Despite this promise, applying diffusion models to motion planning remains challenging due to their difficulty in enforcing critical constraints, such as collision avoidance and kinematic feasibility. These limitations become even more pronounced in Multi-Robot Motion Planning (MRMP), where multiple robots must coordinate in shared spaces. To address this challenge, this work proposes Simultaneous MRMP Diffusion (SMD), a novel approach integrating constrained optimization into the diffusion sampling process to produce collision-free, kinematically feasible trajectories. Additionally, the paper introduces a comprehensive MRMP benchmark to evaluate trajectory planning algorithms across scenarios with varying robot densities, obstacle complexities, and motion constraints. Experimental results show SMD consistently outperforms classical and learning-based motion planners, achieving higher success rates and efficiency in complex multi-robot environments.
Multi-Agent Path Finding in Continuous Spaces with Projected Diffusion Models
Dec 23, 2024



Multi-Agent Path Finding (MAPF) is a fundamental problem in robotics, requiring the computation of collision-free paths for multiple agents moving from their respective start to goal positions. Coordinating multiple agents in a shared environment poses significant challenges, especially in continuous spaces where traditional optimization algorithms struggle with scalability. Moreover, these algorithms often depend on discretized representations of the environment, which can be impractical in image-based or high-dimensional settings. Recently, diffusion models have shown promise in single-agent path planning, capturing complex trajectory distributions and generating smooth paths that navigate continuous, high-dimensional spaces. However, directly extending diffusion models to MAPF introduces new challenges since these models struggle to ensure constraint feasibility, such as inter-agent collision avoidance. To overcome this limitation, this work proposes a novel approach that integrates constrained optimization with diffusion models for MAPF in continuous spaces. This unique combination directly produces feasible multi-agent trajectories that respect collision avoidance and kinematic constraints. The effectiveness of our approach is demonstrated across various challenging simulated scenarios of varying dimensionality.
Interaction-Aware Trajectory Prediction for Safe Motion Planning in Autonomous Driving: A Transformer-Transfer Learning Approach
Nov 03, 2024



A critical aspect of safe and efficient motion planning for autonomous vehicles (AVs) is to handle the complex and uncertain behavior of surrounding human-driven vehicles (HDVs). Despite intensive research on driver behavior prediction, existing approaches typically overlook the interactions between AVs and HDVs assuming that HDV trajectories are not affected by AV actions. To address this gap, we present a transformer-transfer learning-based interaction-aware trajectory predictor for safe motion planning of autonomous driving, focusing on a vehicle-to-vehicle (V2V) interaction scenario consisting of an AV and an HDV. Specifically, we construct a transformer-based interaction-aware trajectory predictor using widely available datasets of HDV trajectory data and further transfer the learned predictor using a small set of AV-HDV interaction data. Then, to better incorporate the proposed trajectory predictor into the motion planning module of AVs, we introduce an uncertainty quantification method to characterize the errors of the predictor, which are integrated into the path-planning process. Our experimental results demonstrate the value of explicitly considering interactions and handling uncertainties.