 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Traffic Speed Dynamics from Visualizations
May 04, 2021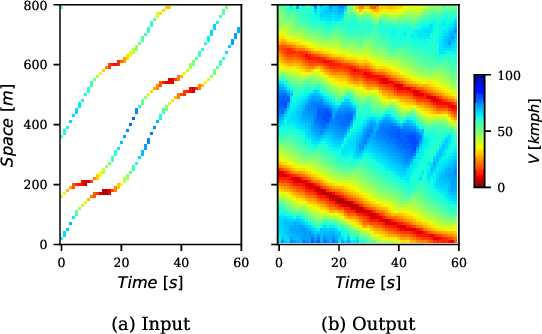
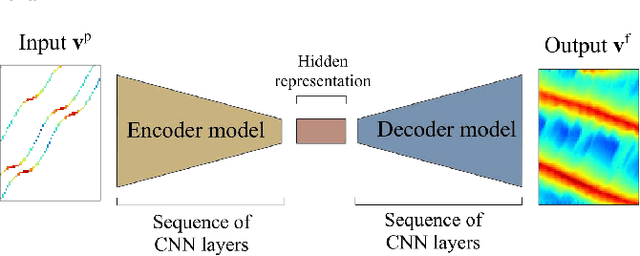

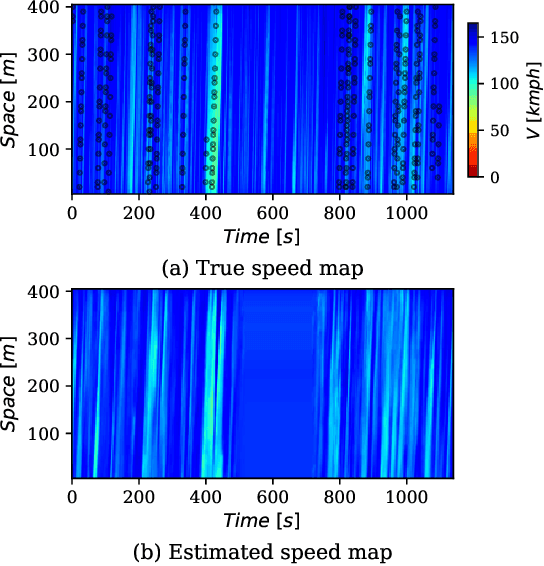
Space-time visualizations of macroscopic or microscopic traffic variables is a qualitative tool used by traffic engineers to understand and analyze different aspects of road traffic dynamics. We present a deep learning method to learn the macroscopic traffic speed dynamics from these space-time visualizations, and demonstrate its application in the framework of traffic state estimation. Compared to existing estimation approaches, our approach allows a finer estimation resolution, eliminates the dependence on the initial conditions, and is agnostic to external factors such as traffic demand, road inhomogeneities and driving behaviors. Our model respects causality in traffic dynamics, which improves the robustness of estimation. We present the high-resolution traffic speed fields estimated for several freeway sections using the data obtained from the Next Generation Simulation Program (NGSIM) and German Highway (HighD) datasets. We further demonstrate the quality and utility of the estimation by inferring vehicle trajectories from the estimated speed fields, and discuss the benefits of deep neural network models in approximating the traffic dynamics.
Incorporating Kinematic Wave Theory into a Deep Learning Method for High-Resolution Traffic Speed Estimation
Feb 04, 2021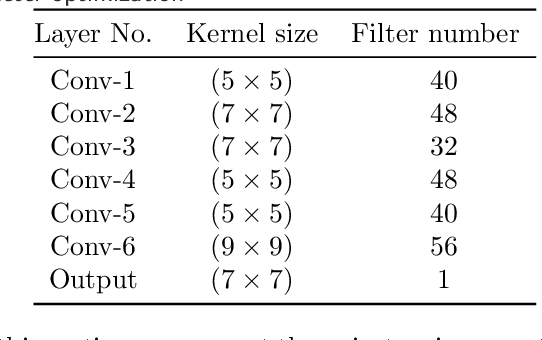
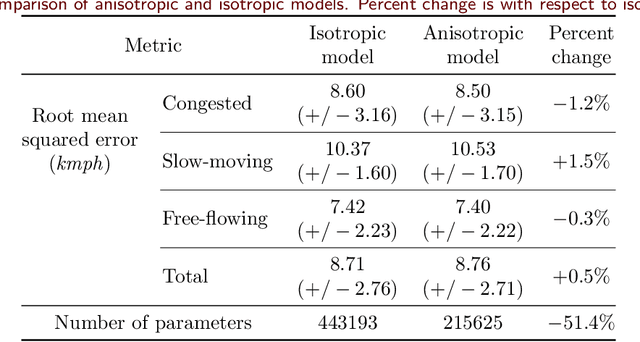
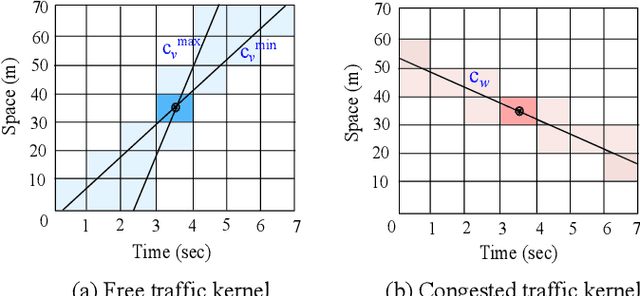

We propose a kinematic wave based Deep Convolutional Neural Network (Deep CNN) to estimate high resolution traffic speed dynamics from sparse probe vehicle trajectories. To that end, we introduce two key approaches that allow us to incorporate kinematic wave theory principles to improve the robustness of existing learning-based estimation methods. First, we use an anisotropic traffic-based kernel for the CNN. This kernel is designed to explicitly take forward and backward traffic wave propagation characteristics into account during reconstruction in the space-time domain. Second, we use simulated data for training the CNN. This implicitly imposes physical constraints on the patterns learned by the CNN, providing an alternate, unrestricted way to integrate complex traffic behaviors into learning models. We present the speed fields estimated using the anisotropic kernel and highlight its advantages over its isotropic counterpart in terms of predicting shockwave dynamics. Furthermore, we test the transferability of the trained model to real traffic by using two datasets: the Next Generation Simulation (NGSIM) program and the Highway Drone (HighD) dataset. Finally, we present an ensemble version of the CNN that allows us to handle multiple (and unknown) probe vehicle penetration rates. The results demonstrate that anisotropic kernels can reduce model complexity while improving the correctness of the estimation, and that simulation-based training is a viable alternative to model fitting using real-world data. This suggests that exploiting prior traffic knowledge adds value to learning-based estimation methods, and that there is great potential in exploring broader approaches to do so.