 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDGPO: RL-Steered Graph Diffusion for Neural Architecture Generation
Feb 22, 2026Reinforcement learning fine-tuning has proven effective for steering generative diffusion models toward desired properties in image and molecular domains. Graph diffusion models have similarly been applied to combinatorial structure generation, including neural architecture search (NAS). However, neural architectures are directed acyclic graphs (DAGs) where edge direction encodes functional semantics such as data flow-information that existing graph diffusion methods, designed for undirected structures, discard. We propose Directed Graph Policy Optimization (DGPO), which extends reinforcement learning fine-tuning of discrete graph diffusion models to DAGs via topological node ordering and positional encoding. Validated on NAS-Bench-101 and NAS-Bench-201, DGPO matches the benchmark optimum on all three NAS-Bench-201 tasks (91.61%, 73.49%, 46.77%). The central finding is that the model learns transferable structural priors: pretrained on only 7% of the search space, it generates near-oracle architectures after fine-tuning, within 0.32 percentage points of the full-data model and extrapolating 7.3 percentage points beyond its training ceiling. Bidirectional control experiments confirm genuine reward-driven steering, with inverse optimization reaching near random-chance accuracy (9.5%). These results demonstrate that reinforcement learning-steered discrete diffusion, once extended to handle directionality, provides a controllable generative framework for directed combinatorial structures.
Noise Robust One-Class Intrusion Detection on Dynamic Graphs
Aug 19, 2025In the domain of network intrusion detection, robustness against contaminated and noisy data inputs remains a critical challenge. This study introduces a probabilistic version of the Temporal Graph Network Support Vector Data Description (TGN-SVDD) model, designed to enhance detection accuracy in the presence of input noise. By predicting parameters of a Gaussian distribution for each network event, our model is able to naturally address noisy adversarials and improve robustness compared to a baseline model. Our experiments on a modified CIC-IDS2017 data set with synthetic noise demonstrate significant improvements in detection performance compared to the baseline TGN-SVDD model, especially as noise levels increase.
Exact Computation of Any-Order Shapley Interactions for Graph Neural Networks
Jan 28, 2025Albeit the ubiquitous use of Graph Neural Networks (GNNs) in machine learning (ML) prediction tasks involving graph-structured data, their interpretability remains challenging. In explainable artificial intelligence (XAI), the Shapley Value (SV) is the predominant method to quantify contributions of individual features to a ML model's output. Addressing the limitations of SVs in complex prediction models, Shapley Interactions (SIs) extend the SV to groups of features. In this work, we explain single graph predictions of GNNs with SIs that quantify node contributions and interactions among multiple nodes. By exploiting the GNN architecture, we show that the structure of interactions in node embeddings are preserved for graph prediction. As a result, the exponential complexity of SIs depends only on the receptive fields, i.e. the message-passing ranges determined by the connectivity of the graph and the number of convolutional layers. Based on our theoretical results, we introduce GraphSHAP-IQ, an efficient approach to compute any-order SIs exactly. GraphSHAP-IQ is applicable to popular message passing techniques in conjunction with a linear global pooling and output layer. We showcase that GraphSHAP-IQ substantially reduces the exponential complexity of computing exact SIs on multiple benchmark datasets. Beyond exact computation, we evaluate GraphSHAP-IQ's approximation of SIs on popular GNN architectures and compare with existing baselines. Lastly, we visualize SIs of real-world water distribution networks and molecule structures using a SI-Graph.
Physics-Informed Graph Neural Networks for Water Distribution Systems
Mar 27, 2024Water distribution systems (WDS) are an integral part of critical infrastructure which is pivotal to urban development. As 70% of the world's population will likely live in urban environments in 2050, efficient simulation and planning tools for WDS play a crucial role in reaching UN's sustainable developmental goal (SDG) 6 - "Clean water and sanitation for all". In this realm, we propose a novel and efficient machine learning emulator, more precisely, a physics-informed deep learning (DL) model, for hydraulic state estimation in WDS. Using a recursive approach, our model only needs a few graph convolutional neural network (GCN) layers and employs an innovative algorithm based on message passing. Unlike conventional machine learning tasks, the model uses hydraulic principles to infer two additional hydraulic state features in the process of reconstructing the available ground truth feature in an unsupervised manner. To the best of our knowledge, this is the first DL approach to emulate the popular hydraulic simulator EPANET, utilizing no additional information. Like most DL models and unlike the hydraulic simulator, our model demonstrates vastly faster emulation times that do not increase drastically with the size of the WDS. Moreover, we achieve high accuracy on the ground truth and very similar results compared to the hydraulic simulator as demonstrated through experiments on five real-world WDS datasets.
Targeted Visualization of the Backbone of Encoder LLMs
Mar 26, 2024Attention based Large Language Models (LLMs) are the state-of-the-art in natural language processing (NLP). The two most common architectures are encoders such as BERT, and decoders like the GPT models. Despite the success of encoder models, on which we focus in this work, they also bear several risks, including issues with bias or their susceptibility for adversarial attacks, signifying the necessity for explainable AI to detect such issues. While there does exist various local explainability methods focusing on the prediction of single inputs, global methods based on dimensionality reduction for classification inspection, which have emerged in other domains and that go further than just using t-SNE in the embedding space, are not widely spread in NLP. To reduce this gap, we investigate the application of DeepView, a method for visualizing a part of the decision function together with a data set in two dimensions, to the NLP domain. While in previous work, DeepView has been used to inspect deep image classification models, we demonstrate how to apply it to BERT-based NLP classifiers and investigate its usability in this domain, including settings with adversarially perturbed input samples and pre-trained, fine-tuned, and multi-task models.
Metropolitan Segment Traffic Speeds from Massive Floating Car Data in 10 Cities
Feb 17, 2023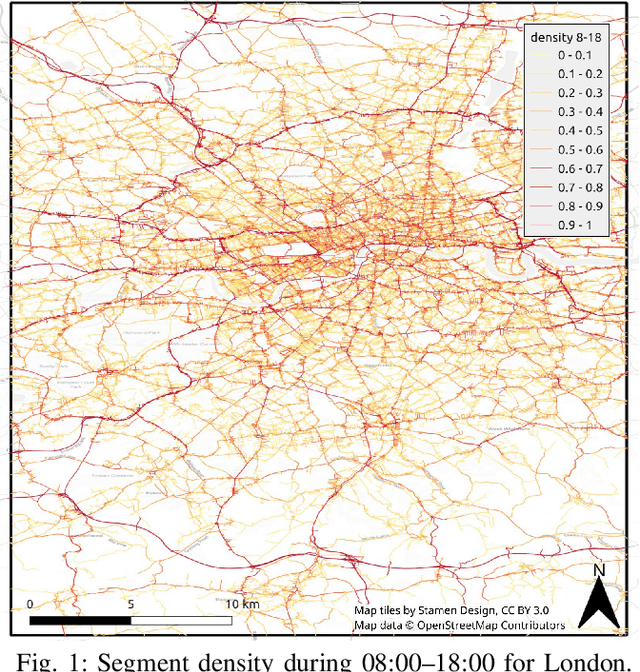
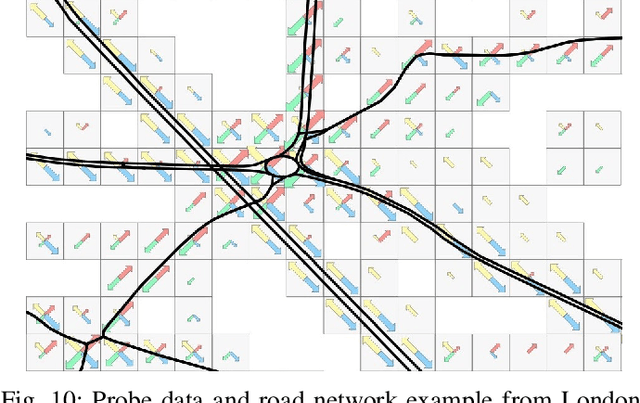
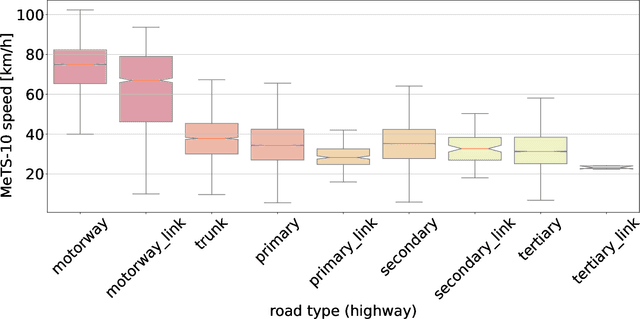
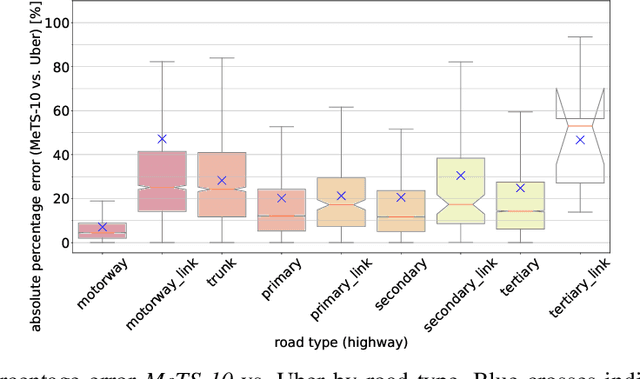
Traffic analysis is crucial for urban operations and planning, while the availability of dense urban traffic data beyond loop detectors is still scarce. We present a large-scale floating vehicle dataset of per-street segment traffic information, Metropolitan Segment Traffic Speeds from Massive Floating Car Data in 10 Cities (MeTS-10), available for 10 global cities with a 15-minute resolution for collection periods ranging between 108 and 361 days in 2019-2021 and covering more than 1500 square kilometers per metropolitan area. MeTS-10 features traffic speed information at all street levels from main arterials to local streets for Antwerp, Bangkok, Barcelona, Berlin, Chicago, Istanbul, London, Madrid, Melbourne and Moscow. The dataset leverages the industrial-scale floating vehicle Traffic4cast data with speeds and vehicle counts provided in a privacy-preserving spatio-temporal aggregation. We detail the efficient matching approach mapping the data to the OpenStreetMap road graph. We evaluate the dataset by comparing it with publicly available stationary vehicle detector data (for Berlin, London, and Madrid) and the Uber traffic speed dataset (for Barcelona, Berlin, and London). The comparison highlights the differences across datasets in spatio-temporal coverage and variations in the reported traffic caused by the binning method. MeTS-10 enables novel, city-wide analysis of mobility and traffic patterns for ten major world cities, overcoming current limitations of spatially sparse vehicle detector data. The large spatial and temporal coverage offers an opportunity for joining the MeTS-10 with other datasets, such as traffic surveys in traffic planning studies or vehicle detector data in traffic control settings.
Spatial Graph Convolution Neural Networks for Water Distribution Systems
Nov 17, 2022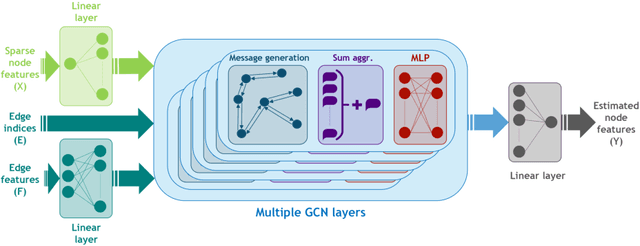

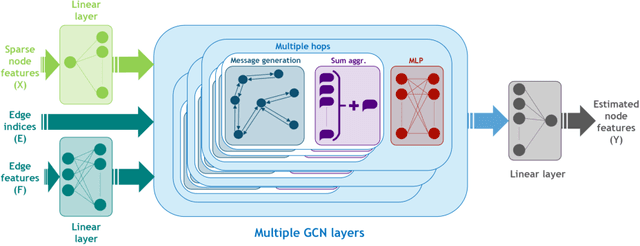
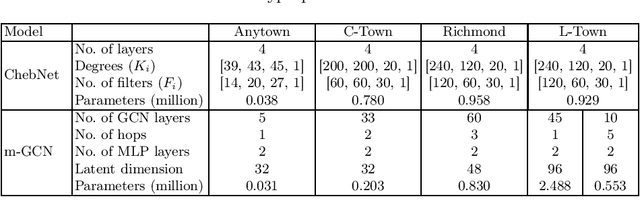
We investigate the task of missing value estimation in graphs as given by water distribution systems (WDS) based on sparse signals as a representative machine learning challenge in the domain of critical infrastructure. The underlying graphs have a comparably low node degree and high diameter, while information in the graph is globally relevant, hence graph neural networks face the challenge of long-term dependencies. We propose a specific architecture based on message passing which displays excellent results for a number of benchmark tasks in the WDS domain. Further, we investigate a multi-hop variation, which requires considerably less resources and opens an avenue towards big WDS graphs.
Traffic4cast at NeurIPS 2021 -- Temporal and Spatial Few-Shot Transfer Learning in Gridded Geo-Spatial Processes
Apr 01, 2022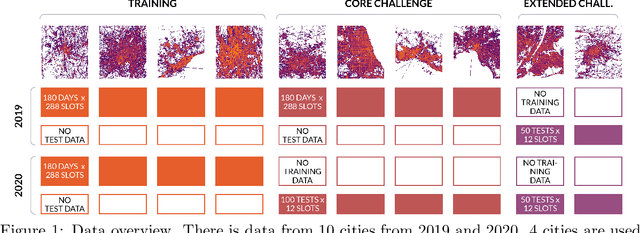
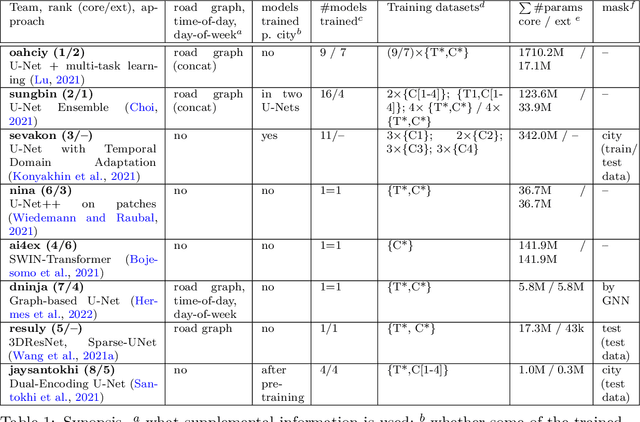

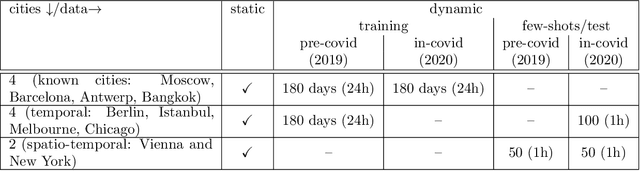
The IARAI Traffic4cast competitions at NeurIPS 2019 and 2020 showed that neural networks can successfully predict future traffic conditions 1 hour into the future on simply aggregated GPS probe data in time and space bins. We thus reinterpreted the challenge of forecasting traffic conditions as a movie completion task. U-Nets proved to be the winning architecture, demonstrating an ability to extract relevant features in this complex real-world geo-spatial process. Building on the previous competitions, Traffic4cast 2021 now focuses on the question of model robustness and generalizability across time and space. Moving from one city to an entirely different city, or moving from pre-COVID times to times after COVID hit the world thus introduces a clear domain shift. We thus, for the first time, release data featuring such domain shifts. The competition now covers ten cities over 2 years, providing data compiled from over 10^12 GPS probe data. Winning solutions captured traffic dynamics sufficiently well to even cope with these complex domain shifts. Surprisingly, this seemed to require only the previous 1h traffic dynamic history and static road graph as input.
A Graph-based U-Net Model for Predicting Traffic in unseen Cities
Mar 01, 2022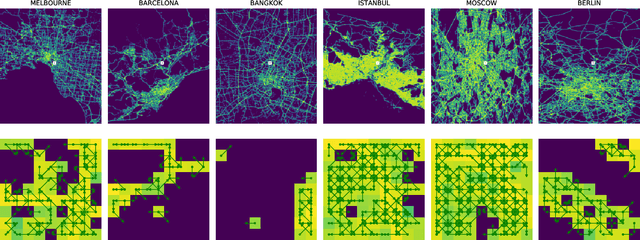
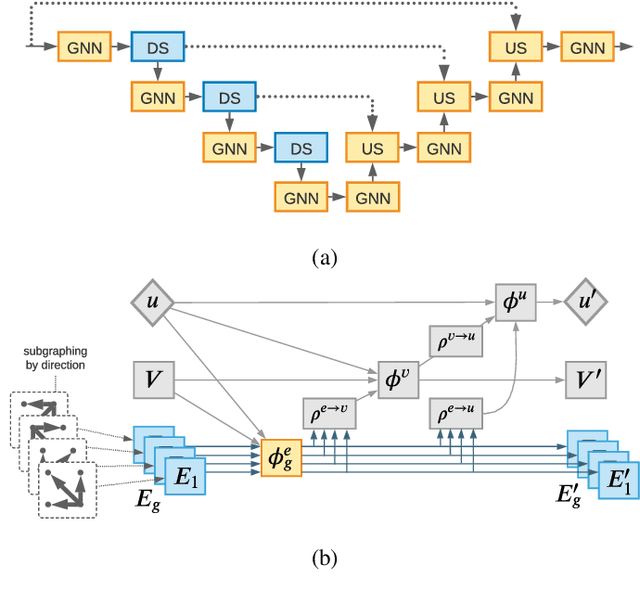
Accurate traffic prediction is a key ingredient to enable traffic management like rerouting cars to reduce road congestion or regulating traffic via dynamic speed limits to maintain a steady flow. A way to represent traffic data is in the form of temporally changing heatmaps visualizing attributes of traffic, such as speed and volume. In recent works, U-Net models have shown SOTA performance on traffic forecasting from heatmaps. We propose to combine the U-Net architecture with graph layers which improves spatial generalization to unseen road networks compared to a Vanilla U-Net. In particular, we specialize existing graph operations to be sensitive to geographical topology and generalize pooling and upsampling operations to be applicable to graphs.
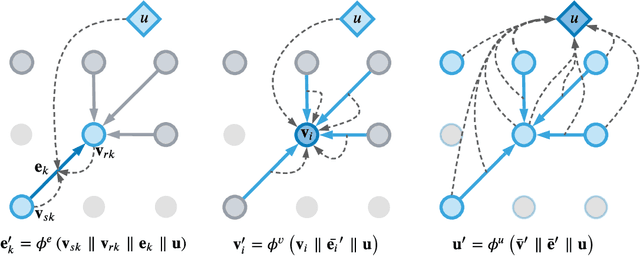
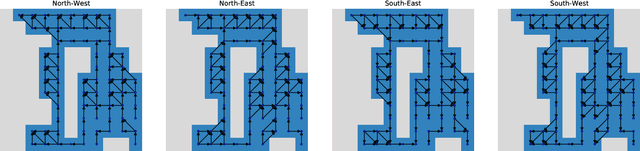
Application of Graph Convolutions in a Lightweight Model for Skeletal Human Motion Forecasting
Oct 10, 2021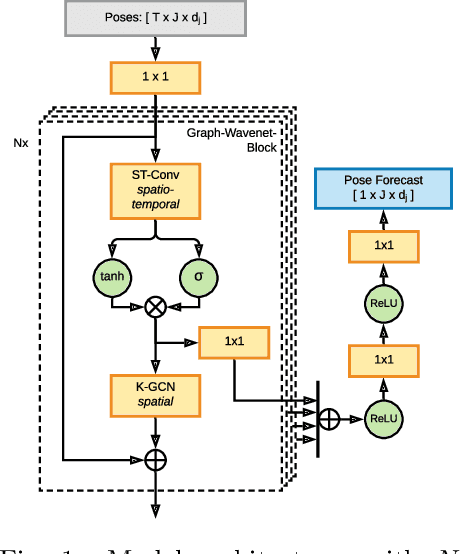
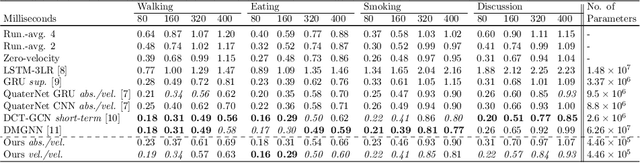
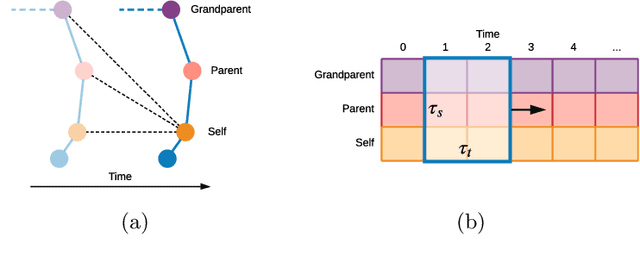
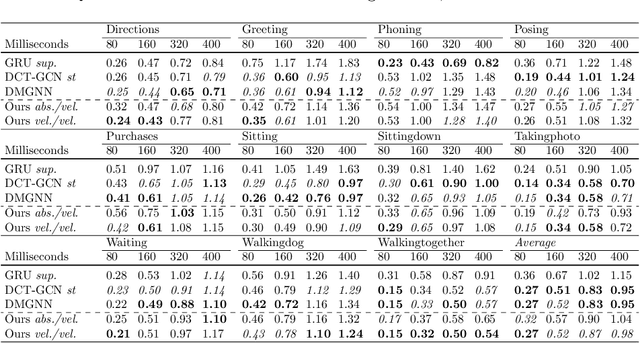
Prediction of movements is essential for successful cooperation with intelligent systems. We propose a model that integrates organized spatial information as given through the moving body's skeletal structure. This inherent structure is exploited in our model through application of Graph Convolutions and we demonstrate how this allows leveraging the structured spatial information into competitive predictions that are based on a lightweight model that requires a comparatively small number of parameters.